 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReview of Autonomous Mobile Robots for the Warehouse Environment
Jun 12, 2024Autonomous mobile robots (AMRs) have been a rapidly expanding research topic for the past decade. Unlike their counterpart, the automated guided vehicle (AGV), AMRs can make decisions and do not need any previously installed infrastructure to navigate. Recent technological developments in hardware and software have made them more feasible, especially in warehouse environments. Traditionally, most wasted warehouse expenses come from the logistics of moving material from one point to another, and is exhaustive for humans to continuously walk those distances while carrying a load. Here, AMRs can help by working with humans to cut down the time and effort of these repetitive tasks, improving performance and reducing the fatigue of their human collaborators. This literature review covers the recent developments in AMR technology including hardware, robotic control, and system control. This paper also discusses examples of current AMR producers, their robots, and the software that is used to control them. We conclude with future research topics and where we see AMRs developing in the warehouse environment.
BRNES: Enabling Security and Privacy-aware Experience Sharing in Multiagent Robotic and Autonomous Systems
Aug 02, 2023



Although experience sharing (ES) accelerates multiagent reinforcement learning (MARL) in an advisor-advisee framework, attempts to apply ES to decentralized multiagent systems have so far relied on trusted environments and overlooked the possibility of adversarial manipulation and inference. Nevertheless, in a real-world setting, some Byzantine attackers, disguised as advisors, may provide false advice to the advisee and catastrophically degrade the overall learning performance. Also, an inference attacker, disguised as an advisee, may conduct several queries to infer the advisors' private information and make the entire ES process questionable in terms of privacy leakage. To address and tackle these issues, we propose a novel MARL framework (BRNES) that heuristically selects a dynamic neighbor zone for each advisee at each learning step and adopts a weighted experience aggregation technique to reduce Byzantine attack impact. Furthermore, to keep the agent's private information safe from adversarial inference attacks, we leverage the local differential privacy (LDP)-induced noise during the ES process. Our experiments show that our framework outperforms the state-of-the-art in terms of the steps to goal, obtained reward, and time to goal metrics. Particularly, our evaluation shows that the proposed framework is 8.32x faster than the current non-private frameworks and 1.41x faster than the private frameworks in an adversarial setting.
AACHER: Assorted Actor-Critic Deep Reinforcement Learning with Hindsight Experience Replay
Oct 24, 2022Actor learning and critic learning are two components of the outstanding and mostly used Deep Deterministic Policy Gradient (DDPG) reinforcement learning method. Since actor and critic learning plays a significant role in the overall robot's learning, the performance of the DDPG approach is relatively sensitive and unstable as a result. We propose a multi-actor-critic DDPG for reliable actor-critic learning to further enhance the performance and stability of DDPG. This multi-actor-critic DDPG is then integrated with Hindsight Experience Replay (HER) to form our new deep learning framework called AACHER. AACHER uses the average value of multiple actors or critics to substitute the single actor or critic in DDPG to increase resistance in the case when one actor or critic performs poorly. Numerous independent actors and critics can also gain knowledge from the environment more broadly. We implemented our proposed AACHER on goal-based environments: AuboReach, FetchReach-v1, FetchPush-v1, FetchSlide-v1, and FetchPickAndPlace-v1. For our experiments, we used various instances of actor/critic combinations, among which A10C10 and A20C20 were the best-performing combinations. Overall results show that AACHER outperforms the traditional algorithm (DDPG+HER) in all of the actor/critic number combinations that are used for evaluation. When used on FetchPickAndPlace-v1, the performance boost for A20C20 is as high as roughly 3.8 times the success rate in DDPG+HER.
Deep Learning Hyperparameter Optimization for Breast Mass Detection in Mammograms
Jul 22, 2022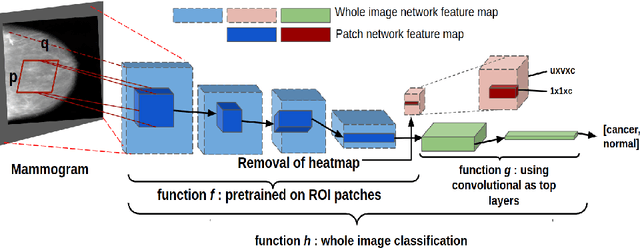
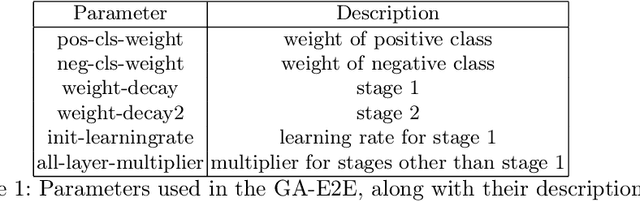
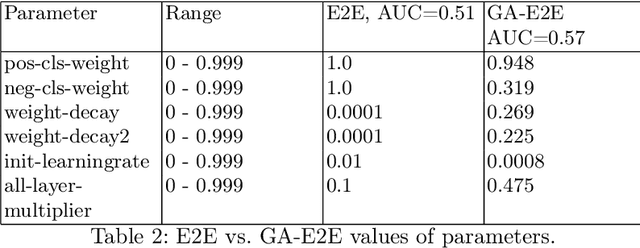
Accurate breast cancer diagnosis through mammography has the potential to save millions of lives around the world. Deep learning (DL) methods have shown to be very effective for mass detection in mammograms. Additional improvements of current DL models will further improve the effectiveness of these methods. A critical issue in this context is how to pick the right hyperparameters for DL models. In this paper, we present GA-E2E, a new approach for tuning the hyperparameters of DL models for brest cancer detection using Genetic Algorithms (GAs). Our findings reveal that differences in parameter values can considerably alter the area under the curve (AUC), which is used to determine a classifier's performance.
GA-DRL: Genetic Algorithm-Based Function Optimizer in Deep Reinforcement Learning for Robotic Manipulation Tasks
Feb 28, 2022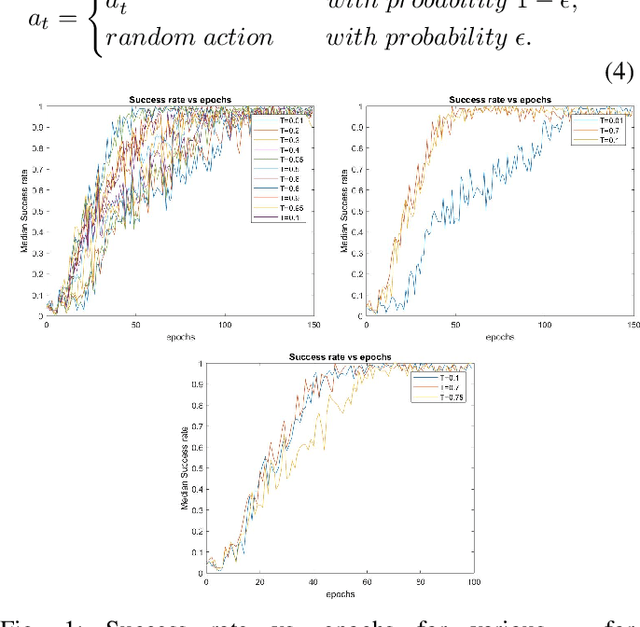
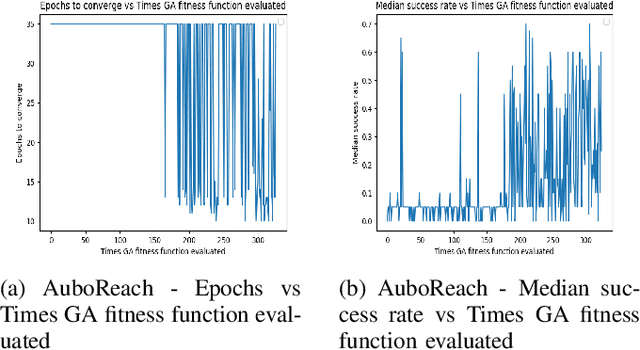
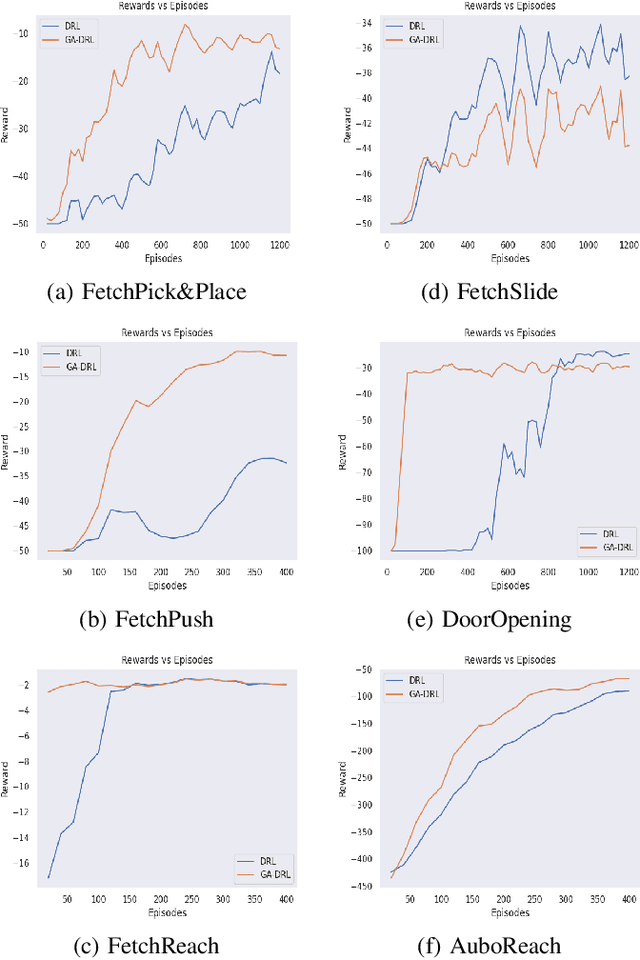
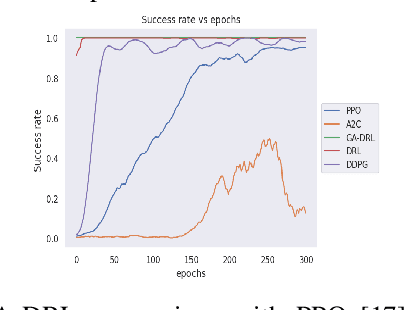
Reinforcement learning (RL) enables agents to make a decision based on a reward function. However, in the process of learning, the choice of values for learning algorithm parameters can significantly impact the overall learning process. In this paper, we proposed a Genetic Algorithm-based Deep Deterministic Policy Gradient and Hindsight Experience Replay method (called GA-DRL) to find near-optimal values of learning parameters. We used the proposed GA-DRL method on fetch-reach, slide, push, pick and place, and door opening in robotic manipulation tasks. With some modifications, our proposed GA-DRL method was also applied to the auboreach environment. Our experimental evaluation shows that our method leads to significantly better performance, faster than the original algorithm. Also, we provide evidence that GA-DRL performs better than the existing methods.
Multi-directional Bicycle Robot for Steel Structure Inspection
Mar 27, 2021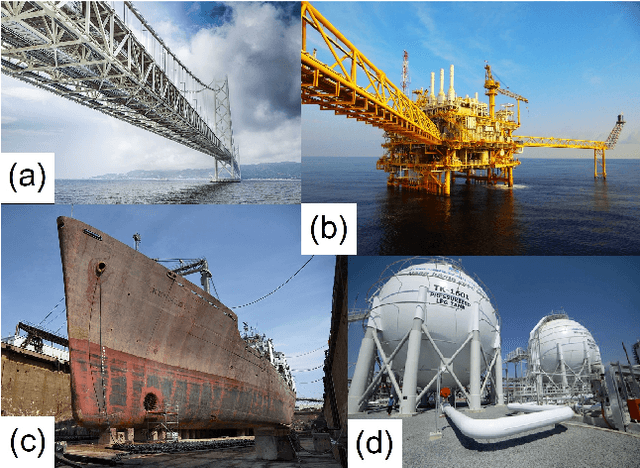

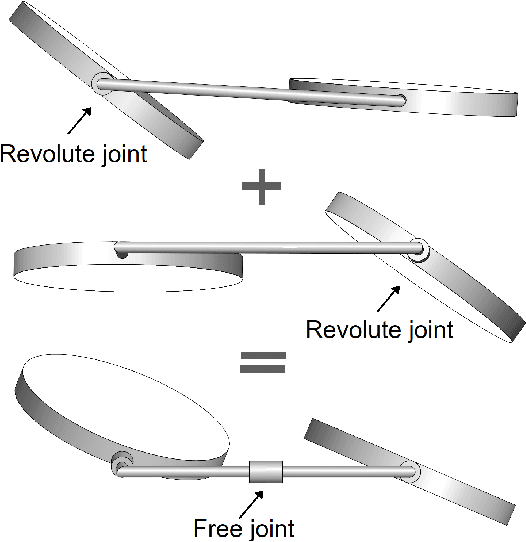
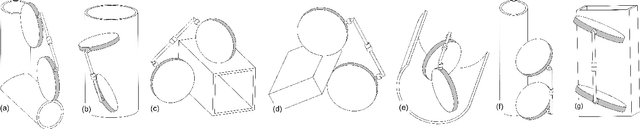
This paper presents a novel design of a multi-directional bicycle robot, which targets inspecting general ferromagnetic structures including complex-shaped structures. The locomotion concept is based on arranging two magnetic wheels in a bicycle-like configuration with two independent steering actuators. This configuration allows the robot to possess multi-directional mobility. An additional free joint helps the robot naturally adapt to non-flat and complex surfaces of steel structures. The robot has the biggest advantage to be mechanically simple with high mobility. Besides, the robot is equipped with sensing tools for structure health monitoring. We demonstrate the deployment of our robot to perform steel rust detection on steel bridges. The final inspection results are visualized as 3D models of the bridges together with marked locations of detected rusty areas.
Control and Navigation Framework for a Hybrid Steel Bridge Inspection Robot
Feb 01, 2021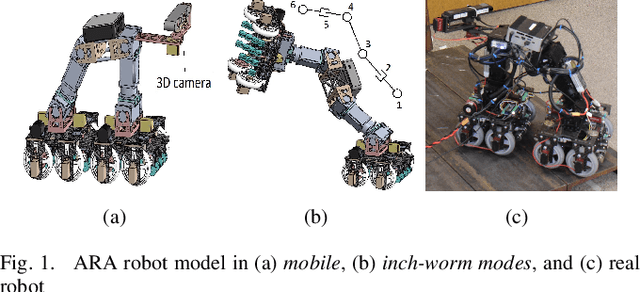



Autonomous navigation of steel bridge inspection robots is essential for proper maintenance. The majority of existing robotic solutions for steel bridge inspection requires human intervention to assist in the control and navigation. In this paper, a control and navigation framework has been proposed for the steel bridge inspection robot developed by the Advanced Robotics and Automation (ARA)to facilitate autonomous real-time navigation and minimize human intervention. The ARA robot is designed to work in two modes: mobile and inch-worm. The robot uses mobile mode when moving on a plane surface and inch-worm mode when jumping from one surface to the other. To allow the ARA robot to switch between mobile and inch-worm modes, a switching controller is developed with 3D point cloud data based. The surface detection algorithm is proposed to allow the robot to check the availability of steel surfaces (plane, area, and height) to determine the transformation from mobile mode to inch-worm one. To have the robot safely navigate and visit all steel members of the bridge, four algorithms are developed to process the data from a depth camera, segment it into clusters, estimate the boundaries, construct a graph representing the structure, generate the shortest inspection path with any starting and ending points, and determine available robot configuration for path planning. Experiments on steel bridge structures setup highlight the effective performance of the algorithms, and the potential to apply to the ARA robot to run on real bridge structures.
A Deep Learning-Based Autonomous RobotManipulator for Sorting Application
Sep 08, 2020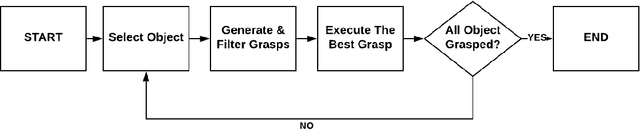
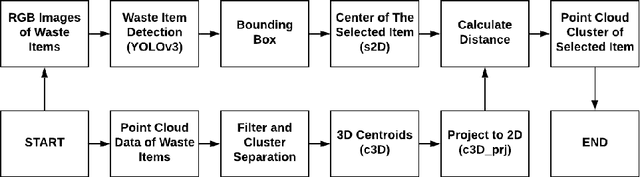
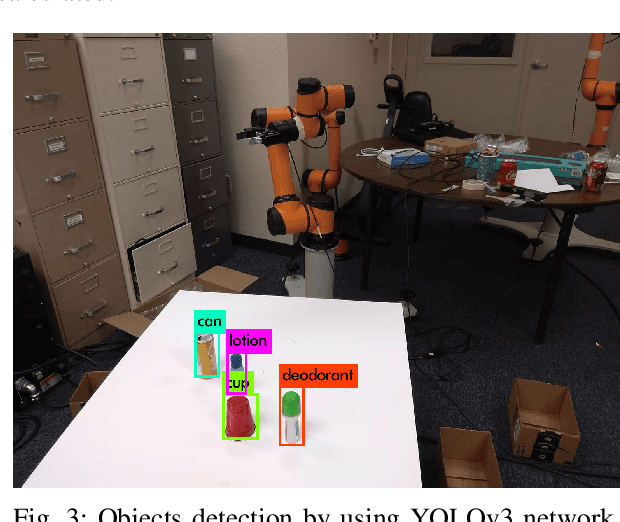
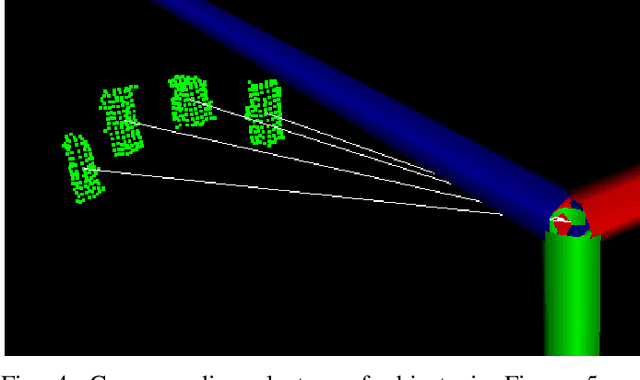
Robot manipulation and grasping mechanisms have received considerable attention in the recent past, leading to the development of wide range of industrial applications. This paper proposes the development of an autonomous robotic grasping system for object sorting application. RGB-D data is used by the robot for performing object detection, pose estimation, trajectory generation, and object sorting tasks. The proposed approach can also handle grasping certain objects chosen by users. Trained convolutional neural networks are used to perform object detection and determine the corresponding point cloud cluster of the object to be grasped. From the selected point cloud data, a grasp generator algorithm outputs potential grasps. A grasp filter then scores these potential grasps, and the highest-scored grasp is chosen to execute on a real robot. A motion planner generates collision-free trajectories to execute the chosen grasp. The experiments on AUBO robotic manipulator show the potentials of the proposed approach in the context of autonomous object sorting with robust and fast sorting performance.
Lidar-Monocular Visual Odometry with Genetic Algorithm for Parameter Optimization
Mar 05, 2019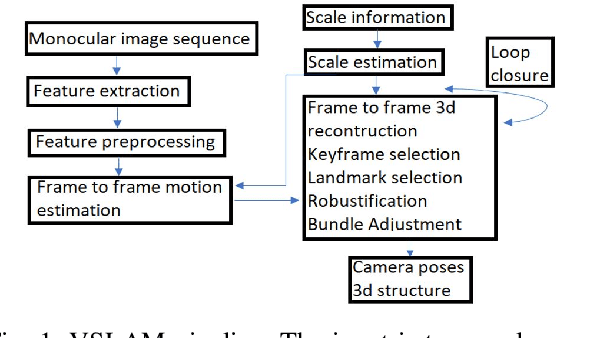

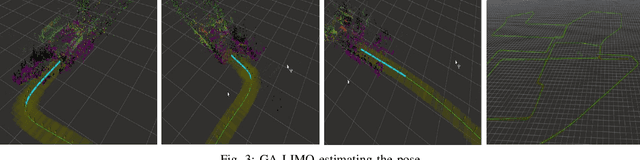

Lidar-Monocular Visual Odometry (LIMO), a odometry estimation algorithm, combines camera and LIght Detection And Ranging sensor (LIDAR) for visual localization by tracking camera features as well as features from LIDAR measurements, and it estimates the motion using Bundle Adjustment based on robust key frames. For rejecting the outliers, LIMO uses semantic labelling and weights of the vegetation landmarks. A drawback of LIMO as well as many other odometry estimation algorithms is that it has many parameters that need to be manually adjusted according to the dynamic changes in the environment in order to decrease the translational errors. In this paper, we present and argue the use of Genetic Algorithm to optimize parameters with reference to LIMO and maximize LIMO's localization and motion estimation performance. We evaluate our approach on the well known KITTI odometry dataset and show that the genetic algorithm helps LIMO to reduce translation error in different datasets.
A Multi-Robotic System for Environmental Cleaning
Nov 02, 2018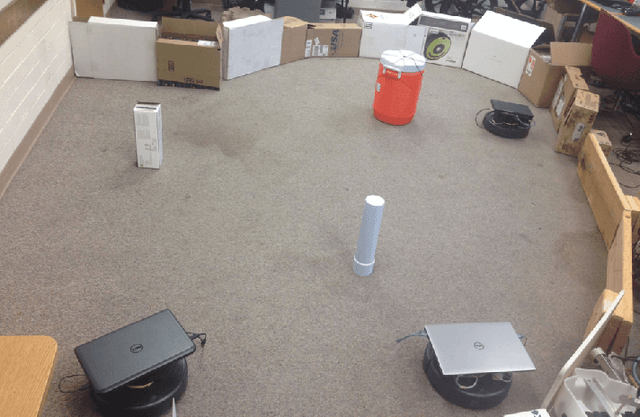
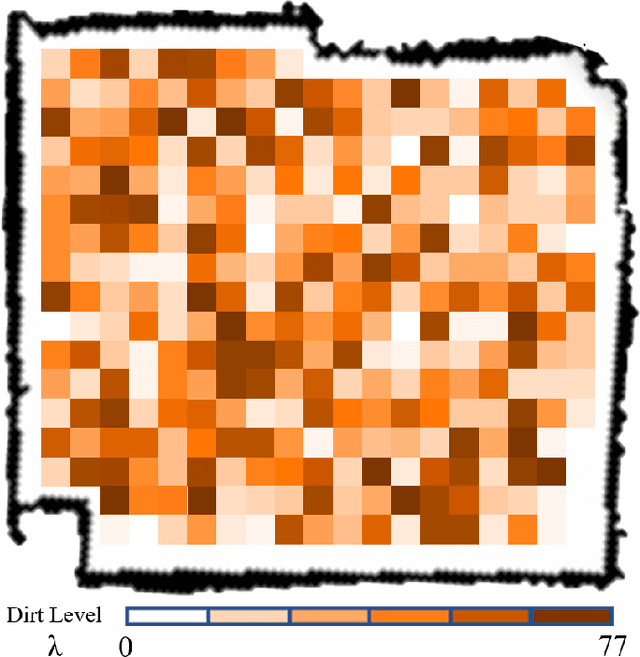
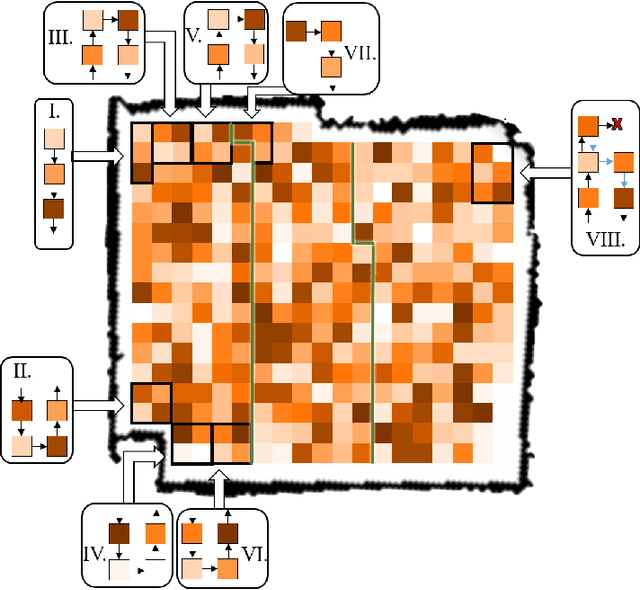
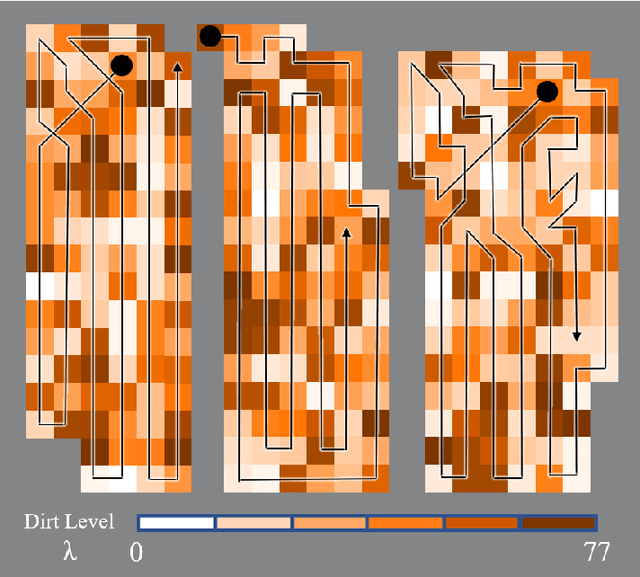
There is a lot of waste in an industrial environment that could cause harmful effects to both the products and the workers resulting in product defects, itchy eyes or chronic obstructive pulmonary disease, etc. While automative cleaning robots could be used, the environment is often too big for one robot to clean alone in addition to the fact that it does not have adequate stored dirt capacity. We present a multi-robotic dirt cleaning system algorithm for multiple automatic iRobot Creates teaming to efficiently clean an environment. Moreover, since some spaces in the environment are clean while others are dirty, our multi-robotic system possesses a path planning algorithm to allow the robot team to clean efficiently by spending more time on the area with higher dirt level. Overall, our multi-robotic system outperforms the single robot system in time efficiency while having almost the same total battery usage and cleaning efficiency result.