 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistration of 3D Point Sets Using Correntropy Similarity Matrix
Jul 20, 2021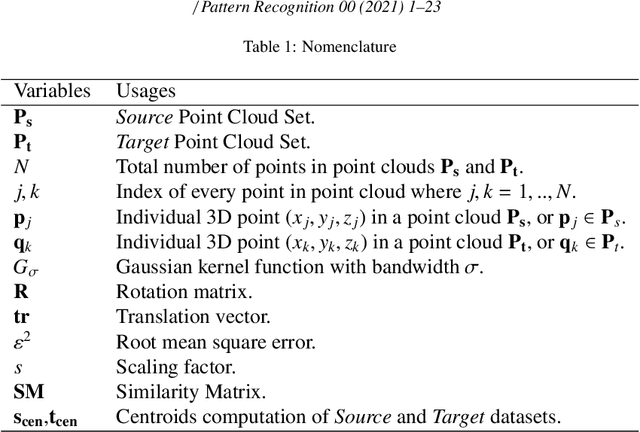
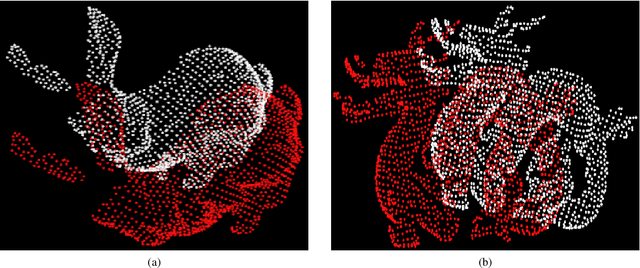
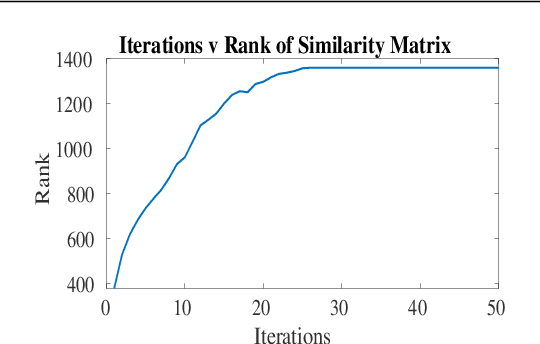
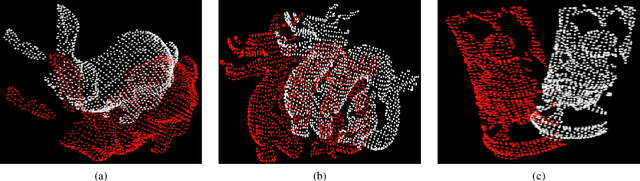
This work focuses on Registration or Alignment of 3D point sets. Although the Registration problem is a well established problem and it's solved using multiple variants of Iterative Closest Point (ICP) Algorithm, most of the approaches in the current state of the art still suffers from misalignment when the \textit{Source} and the \textit{Target} point sets are separated by large rotations and translation. In this work, we propose a variant of the Standard ICP algorithm, where we introduce a Correntropy Relationship Matrix in the computation of rotation and translation component which attempts to solve the large rotation and translation problem between \textit{Source} and \textit{Target} point sets. This matrix is created through correntropy criterion which is updated in every iteration. The correntropy criterion defined in this approach maintains the relationship between the points in the \textit{Source} dataset and the \textit{Target} dataset. Through our experiments and validation we verify that our approach has performed well under various rotation and translation in comparison to the other well-known state of the art methods available in the Point Cloud Library (PCL) as well as other methods available as open source. We have uploaded our code in the github repository for the readers to validate and verify our approach https://github.com/aralab-unr/CoSM-ICP.
Lidar-Monocular Visual Odometry with Genetic Algorithm for Parameter Optimization
Mar 05, 2019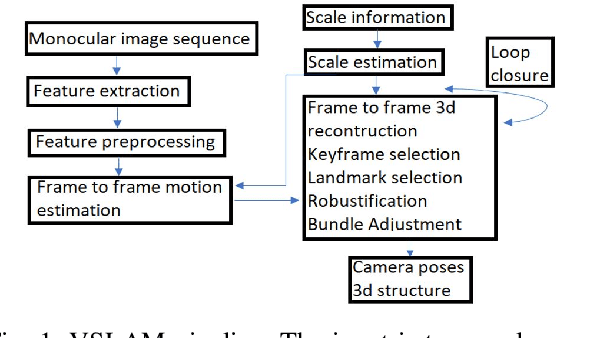

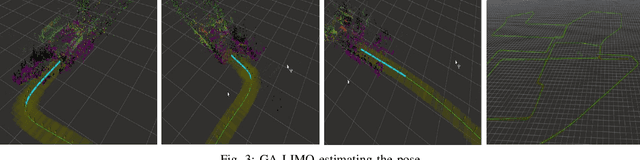

Lidar-Monocular Visual Odometry (LIMO), a odometry estimation algorithm, combines camera and LIght Detection And Ranging sensor (LIDAR) for visual localization by tracking camera features as well as features from LIDAR measurements, and it estimates the motion using Bundle Adjustment based on robust key frames. For rejecting the outliers, LIMO uses semantic labelling and weights of the vegetation landmarks. A drawback of LIMO as well as many other odometry estimation algorithms is that it has many parameters that need to be manually adjusted according to the dynamic changes in the environment in order to decrease the translational errors. In this paper, we present and argue the use of Genetic Algorithm to optimize parameters with reference to LIMO and maximize LIMO's localization and motion estimation performance. We evaluate our approach on the well known KITTI odometry dataset and show that the genetic algorithm helps LIMO to reduce translation error in different datasets.
Securing a UAV Using Individual Characteristics From an EEG Signal
Apr 15, 2017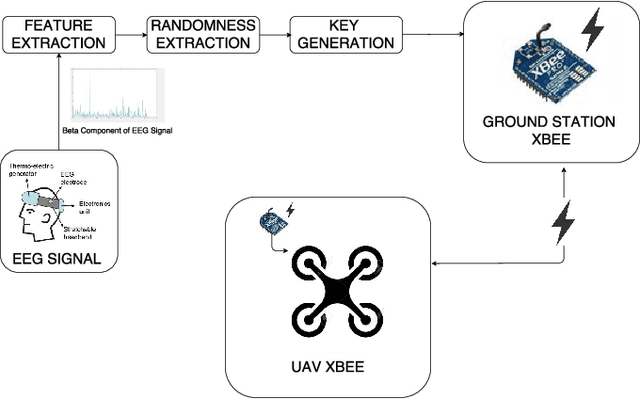
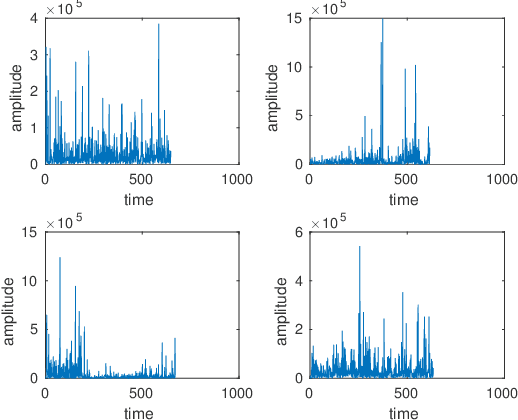
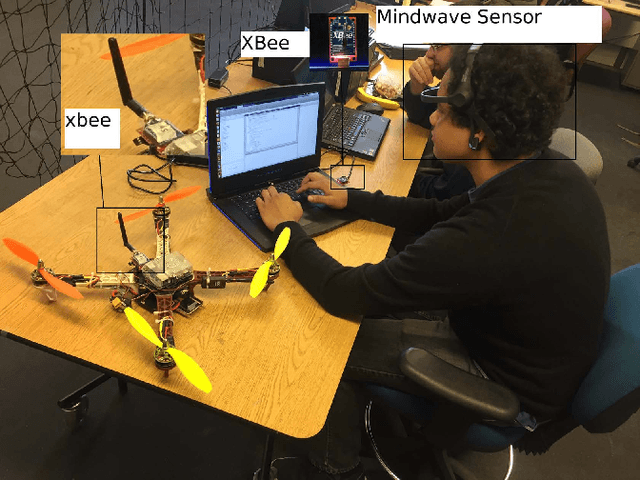
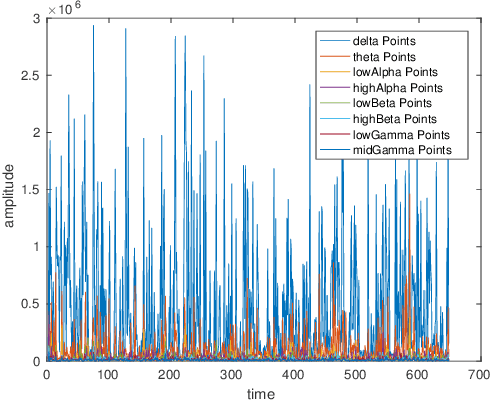
Unmanned aerial vehicles (UAVs) have gained much attention in recent years for both commercial and military applications. The progress in this field has gained much popularity and the research has encompassed various fields of scientific domain. Cyber securing a UAV communication has been one of the active research field since the attack on Predator UAV video stream hijacking in 2009. Since UAVs rely heavily on on-board autopilot to function, it is important to develop an autopilot system that is robust to possible cyber attacks. In this work, we present a biometric system to encrypt the UAV communication by generating a key which is derived from Beta component of the EEG signal of a user. We have developed a safety mechanism that would be activated in case the communication of the UAV from the ground control station gets attacked. This system has been validated on a commercial UAV under malicious attack conditions during which we implement a procedure where the UAV return safely to a "home" position.