 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Bits to Chips: An LLM-based Hardware-Aware Quantization Agent for Streamlined Deployment of LLMs
Jan 07, 2026Deploying models, especially large language models (LLMs), is becoming increasingly attractive to a broader user base, including those without specialized expertise. However, due to the resource constraints of certain hardware, maintaining high accuracy with larger model while meeting the hardware requirements remains a significant challenge. Model quantization technique helps mitigate memory and compute bottlenecks, yet the added complexities of tuning and deploying quantized models further exacerbates these challenges, making the process unfriendly to most of the users. We introduce the Hardware-Aware Quantization Agent (HAQA), an automated framework that leverages LLMs to streamline the entire quantization and deployment process by enabling efficient hyperparameter tuning and hardware configuration, thereby simultaneously improving deployment quality and ease of use for a broad range of users. Our results demonstrate up to a 2.3x speedup in inference, along with increased throughput and improved accuracy compared to unoptimized models on Llama. Additionally, HAQA is designed to implement adaptive quantization strategies across diverse hardware platforms, as it automatically finds optimal settings even when they appear counterintuitive, thereby reducing extensive manual effort and demonstrating superior adaptability. Code will be released.
What Lurks Within? Concept Auditing for Shared Diffusion Models at Scale
Apr 21, 2025Diffusion models (DMs) have revolutionized text-to-image generation, enabling the creation of highly realistic and customized images from text prompts. With the rise of parameter-efficient fine-tuning (PEFT) techniques like LoRA, users can now customize powerful pre-trained models using minimal computational resources. However, the widespread sharing of fine-tuned DMs on open platforms raises growing ethical and legal concerns, as these models may inadvertently or deliberately generate sensitive or unauthorized content, such as copyrighted material, private individuals, or harmful content. Despite the increasing regulatory attention on generative AI, there are currently no practical tools for systematically auditing these models before deployment. In this paper, we address the problem of concept auditing: determining whether a fine-tuned DM has learned to generate a specific target concept. Existing approaches typically rely on prompt-based input crafting and output-based image classification but suffer from critical limitations, including prompt uncertainty, concept drift, and poor scalability. To overcome these challenges, we introduce Prompt-Agnostic Image-Free Auditing (PAIA), a novel, model-centric concept auditing framework. By treating the DM as the object of inspection, PAIA enables direct analysis of internal model behavior, bypassing the need for optimized prompts or generated images. We evaluate PAIA on 320 controlled model and 690 real-world community models sourced from a public DM sharing platform. PAIA achieves over 90% detection accuracy while reducing auditing time by 18-40x compared to existing baselines. To our knowledge, PAIA is the first scalable and practical solution for pre-deployment concept auditing of diffusion models, providing a practical foundation for safer and more transparent diffusion model sharing.
Sculpting Memory: Multi-Concept Forgetting in Diffusion Models via Dynamic Mask and Concept-Aware Optimization
Apr 12, 2025Text-to-image (T2I) diffusion models have achieved remarkable success in generating high-quality images from textual prompts. However, their ability to store vast amounts of knowledge raises concerns in scenarios where selective forgetting is necessary, such as removing copyrighted content, reducing biases, or eliminating harmful concepts. While existing unlearning methods can remove certain concepts, they struggle with multi-concept forgetting due to instability, residual knowledge persistence, and generation quality degradation. To address these challenges, we propose \textbf{Dynamic Mask coupled with Concept-Aware Loss}, a novel unlearning framework designed for multi-concept forgetting in diffusion models. Our \textbf{Dynamic Mask} mechanism adaptively updates gradient masks based on current optimization states, allowing selective weight modifications that prevent interference with unrelated knowledge. Additionally, our \textbf{Concept-Aware Loss} explicitly guides the unlearning process by enforcing semantic consistency through superclass alignment, while a regularization loss based on knowledge distillation ensures that previously unlearned concepts remain forgotten during sequential unlearning. We conduct extensive experiments to evaluate our approach. Results demonstrate that our method outperforms existing unlearning techniques in forgetting effectiveness, output fidelity, and semantic coherence, particularly in multi-concept scenarios. Our work provides a principled and flexible framework for stable and high-fidelity unlearning in generative models. The code will be released publicly.
S-RAN: Semantic-Aware Radio Access Networks
Jul 15, 2024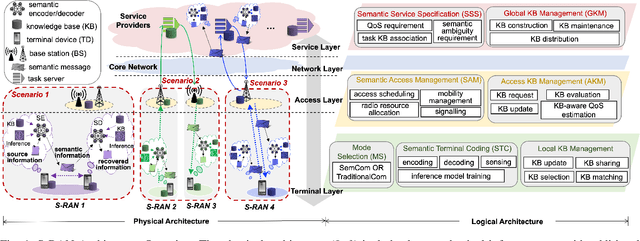

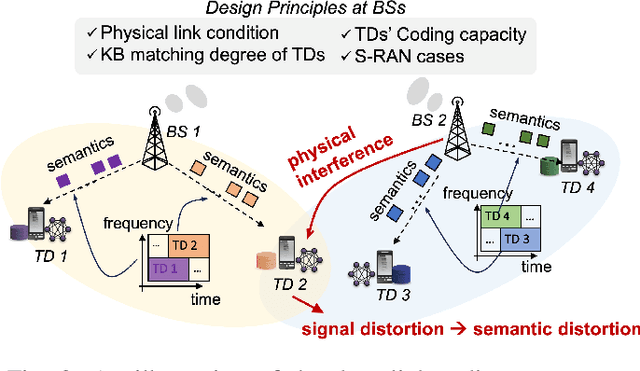
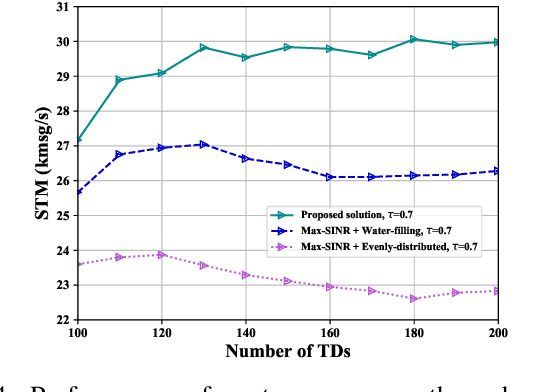
Semantic communication (SemCom) has been a transformative paradigm, emphasizing the precise exchange of meaningful information over traditional bit-level transmissions. However, existing SemCom research, primarily centered on simplified scenarios like single-pair transmissions with direct wireless links, faces significant challenges when applied to real-world radio access networks (RANs). This article introduces a Semantic-aware Radio Access Network (S-RAN), offering a holistic systematic view of SemCom beyond single-pair transmissions. We begin by outlining the S-RAN architecture, introducing new physical components and logical functions along with key design challenges. We then present transceiver design for end-to-end transmission to overcome conventional SemCom transceiver limitations, including static channel conditions, oversimplified background knowledge models, and hardware constraints. Later, we delve into the discussion on radio resource management for multiple users, covering semantic channel modeling, performance metrics, resource management algorithms, and a case study, to elaborate distinctions from resource management for legacy RANs. Finally, we highlight open research challenges and potential solutions. The objective of this article is to serve as a basis for advancing SemCom research into practical wireless systems.
Improving Channel Resilience for Task-Oriented Semantic Communications: A Unified Information Bottleneck Approach
Apr 30, 2024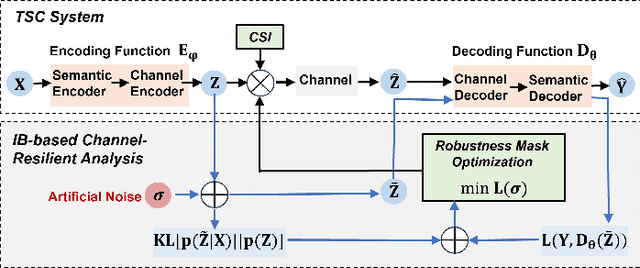
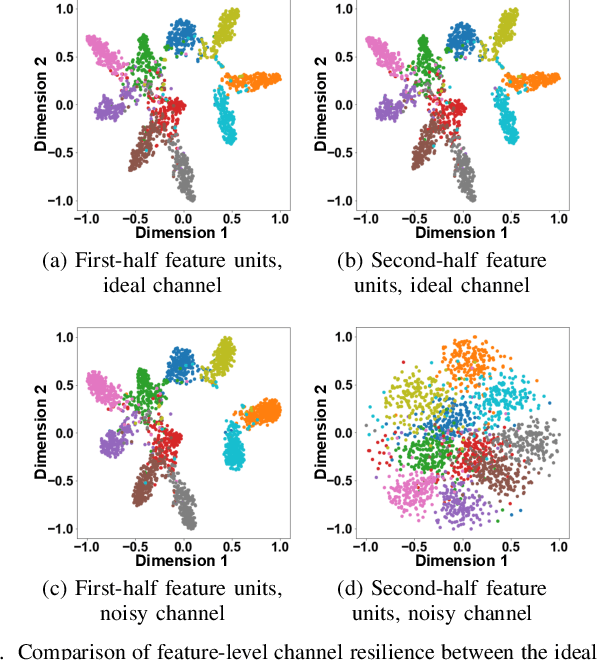
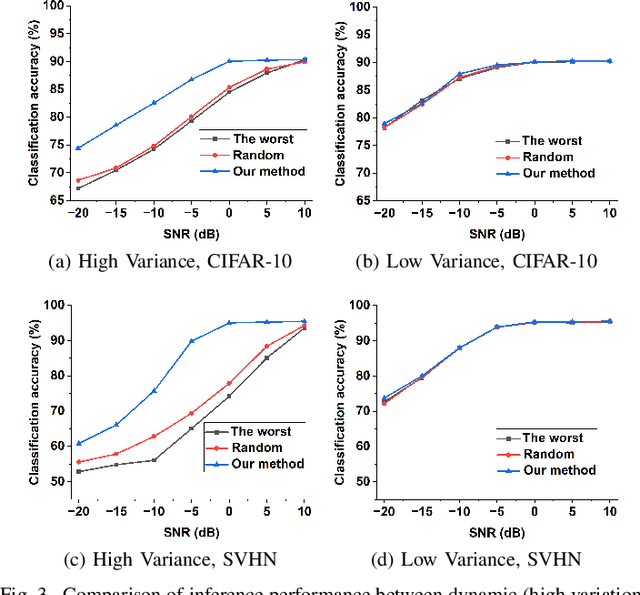
Task-oriented semantic communications (TSC) enhance radio resource efficiency by transmitting task-relevant semantic information. However, current research often overlooks the inherent semantic distinctions among encoded features. Due to unavoidable channel variations from time and frequency-selective fading, semantically sensitive feature units could be more susceptible to erroneous inference if corrupted by dynamic channels. Therefore, this letter introduces a unified channel-resilient TSC framework via information bottleneck. This framework complements existing TSC approaches by controlling information flow to capture fine-grained feature-level semantic robustness. Experiments on a case study for real-time subchannel allocation validate the framework's effectiveness.
A Meta-learning based Generalizable Indoor Localization Model using Channel State Information
May 22, 2023



Indoor localization has gained significant attention in recent years due to its various applications in smart homes, industrial automation, and healthcare, especially since more people rely on their wireless devices for location-based services. Deep learning-based solutions have shown promising results in accurately estimating the position of wireless devices in indoor environments using wireless parameters such as Channel State Information (CSI) and Received Signal Strength Indicator (RSSI). However, despite the success of deep learning-based approaches in achieving high localization accuracy, these models suffer from a lack of generalizability and can not be readily-deployed to new environments or operate in dynamic environments without retraining. In this paper, we propose meta-learning-based localization models to address the lack of generalizability that persists in conventionally trained DL-based localization models. Furthermore, since meta-learning algorithms require diverse datasets from several different scenarios, which can be hard to collect in the context of localization, we design and propose a new meta-learning algorithm, TB-MAML (Task Biased Model Agnostic Meta Learning), intended to further improve generalizability when the dataset is limited. Lastly, we evaluate the performance of TB-MAML-based localization against conventionally trained localization models and localization done using other meta-learning algorithms.
Towards High-Quality and Efficient Video Super-Resolution via Spatial-Temporal Data Overfitting
Mar 15, 2023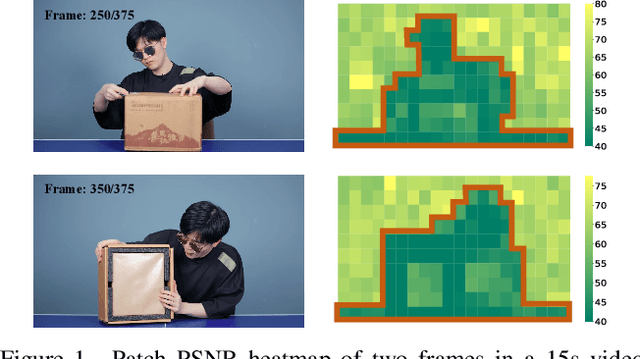
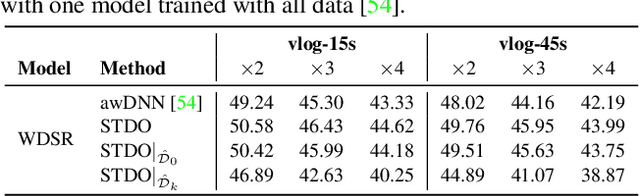
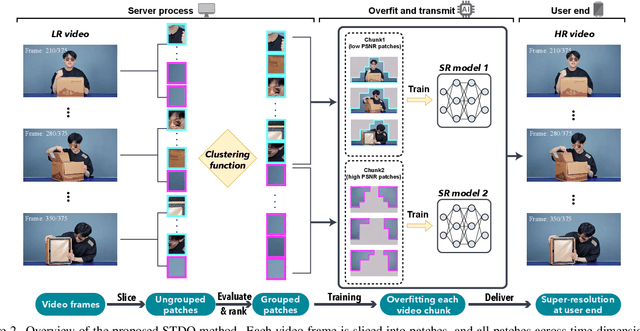
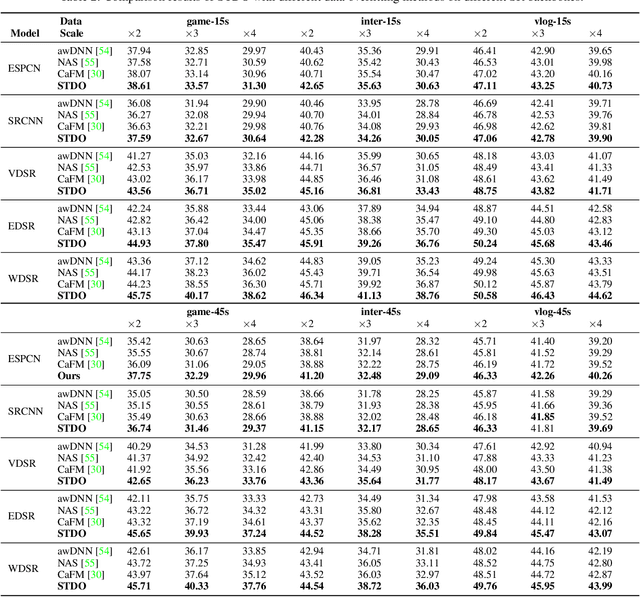
As deep convolutional neural networks (DNNs) are widely used in various fields of computer vision, leveraging the overfitting ability of the DNN to achieve video resolution upscaling has become a new trend in the modern video delivery system. By dividing videos into chunks and overfitting each chunk with a super-resolution model, the server encodes videos before transmitting them to the clients, thus achieving better video quality and transmission efficiency. However, a large number of chunks are expected to ensure good overfitting quality, which substantially increases the storage and consumes more bandwidth resources for data transmission. On the other hand, decreasing the number of chunks through training optimization techniques usually requires high model capacity, which significantly slows down execution speed. To reconcile such, we propose a novel method for high-quality and efficient video resolution upscaling tasks, which leverages the spatial-temporal information to accurately divide video into chunks, thus keeping the number of chunks as well as the model size to minimum. Additionally, we advance our method into a single overfitting model by a data-aware joint training technique, which further reduces the storage requirement with negligible quality drop. We deploy our models on an off-the-shelf mobile phone, and experimental results show that our method achieves real-time video super-resolution with high video quality. Compared with the state-of-the-art, our method achieves 28 fps streaming speed with 41.6 PSNR, which is 14$\times$ faster and 2.29 dB better in the live video resolution upscaling tasks. Our codes are available at: https://github.com/coulsonlee/STDO-CVPR2023.git
Securing a UAV Using Individual Characteristics From an EEG Signal
Apr 15, 2017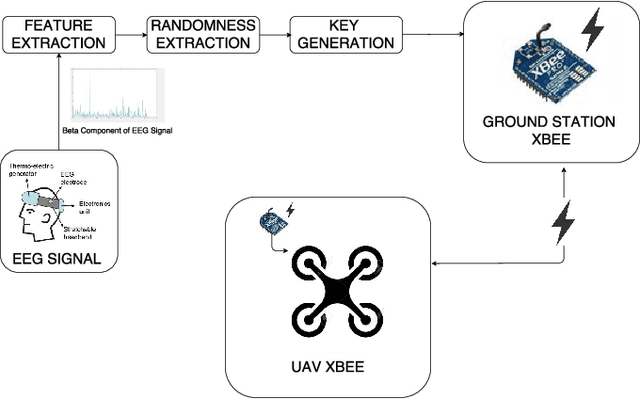
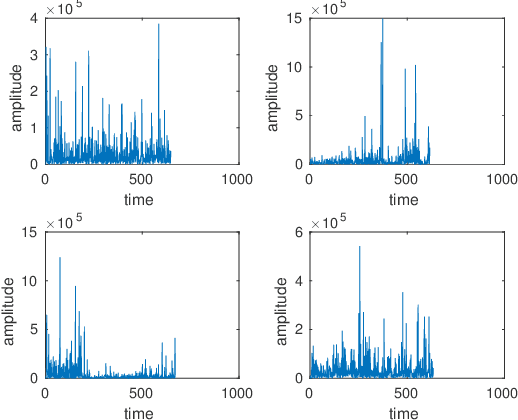
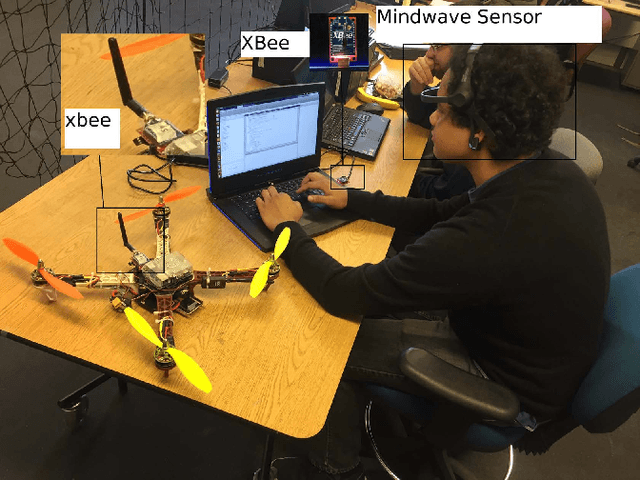
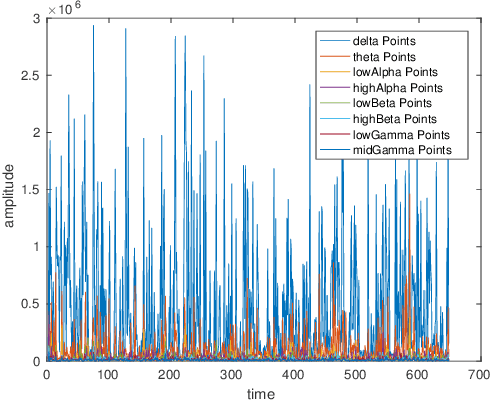
Unmanned aerial vehicles (UAVs) have gained much attention in recent years for both commercial and military applications. The progress in this field has gained much popularity and the research has encompassed various fields of scientific domain. Cyber securing a UAV communication has been one of the active research field since the attack on Predator UAV video stream hijacking in 2009. Since UAVs rely heavily on on-board autopilot to function, it is important to develop an autopilot system that is robust to possible cyber attacks. In this work, we present a biometric system to encrypt the UAV communication by generating a key which is derived from Beta component of the EEG signal of a user. We have developed a safety mechanism that would be activated in case the communication of the UAV from the ground control station gets attacked. This system has been validated on a commercial UAV under malicious attack conditions during which we implement a procedure where the UAV return safely to a "home" position.