 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMULTI-SCOUT: Multistatic Integrated Sensing and Communications in 5G and Beyond for Moving Target Detection, Positioning, and Tracking
Jul 03, 2025This paper presents a complete signal-processing chain for multistatic integrated sensing and communications (ISAC) using 5G Positioning Reference Signal (PRS). We consider a distributed architecture in which one gNB transmits a periodic OFDM-PRS waveform while multiple spatially separated receivers exploit the same signal for target detection, parameter estimation and tracking. A coherent cross-ambiguity function (CAF) is evaluated to form a range-Doppler map from which the bistatic delay and radial velocity are extracted for every target. For a single target, the resulting bistatic delays are fused through nonlinear least-squares trilateration, yielding a geometric position estimate, and a regularized linear inversion of the radial-speed equations yields a two-dimensional velocity vector, where speed and heading are obtained. The approach is applied to 2D and 3D settings, extended to account for time synchronization bias, and generalized to multiple targets by resolving target association. The sequence of position-velocity estimates is then fed to standard and extended Kalman filters to obtain smoothed tracks. Our results show high-fidelity moving-target detection, positioning, and tracking using 5G PRS signals for multistatic ISAC.
Online Meta-Learning Channel Autoencoder for Dynamic End-to-end Physical Layer Optimization
Jan 03, 2025



Channel Autoencoders (CAEs) have shown significant potential in optimizing the physical layer of a wireless communication system for a specific channel through joint end-to-end training. However, the practical implementation of CAEs faces several challenges, particularly in realistic and dynamic scenarios. Channels in communication systems are dynamic and change with time. Still, most proposed CAE designs assume stationary scenarios, meaning they are trained and tested for only one channel realization without regard for the dynamic nature of wireless communication systems. Moreover, conventional CAEs are designed based on the assumption of having access to a large number of pilot signals, which act as training samples in the context of CAEs. However, in real-world applications, it is not feasible for a CAE operating in real-time to acquire large amounts of training samples for each new channel realization. Hence, the CAE has to be deployable in few-shot learning scenarios where only limited training samples are available. Furthermore, most proposed conventional CAEs lack fast adaptability to new channel realizations, which becomes more pronounced when dealing with a limited number of pilots. To address these challenges, this paper proposes the Online Meta Learning channel AE (OML-CAE) framework for few-shot CAE scenarios with dynamic channels. The OML-CAE framework enhances adaptability to varying channel conditions in an online manner, allowing for dynamic adjustments in response to evolving communication scenarios. Moreover, it can adapt to new channel conditions using only a few pilots, drastically increasing pilot efficiency and making the CAE design feasible in realistic scenarios.
DARDA: Domain-Aware Real-Time Dynamic Neural Network Adaptation
Sep 15, 2024Test Time Adaptation (TTA) has emerged as a practical solution to mitigate the performance degradation of Deep Neural Networks (DNNs) in the presence of corruption/ noise affecting inputs. Existing approaches in TTA continuously adapt the DNN, leading to excessive resource consumption and performance degradation due to accumulation of error stemming from lack of supervision. In this work, we propose Domain-Aware Real-Time Dynamic Adaptation (DARDA) to address such issues. Our key approach is to proactively learn latent representations of some corruption types, each one associated with a sub-network state tailored to correctly classify inputs affected by that corruption. After deployment, DARDA adapts the DNN to previously unseen corruptions in an unsupervised fashion by (i) estimating the latent representation of the ongoing corruption; (ii) selecting the sub-network whose associated corruption is the closest in the latent space to the ongoing corruption; and (iii) adapting DNN state, so that its representation matches the ongoing corruption. This way, DARDA is more resource efficient and can swiftly adapt to new distributions caused by different corruptions without requiring a large variety of input data. Through experiments with two popular mobile edge devices - Raspberry Pi and NVIDIA Jetson Nano - we show that DARDA reduces energy consumption and average cache memory footprint respectively by 1.74x and 2.64x with respect to the state of the art, while increasing the performance by 10.4%, 5.7% and 4.4% on CIFAR-10, CIFAR-100 and TinyImagenet.
Dynamic Online Modulation Recognition using Incremental Learning
Dec 07, 2023



Modulation recognition is a fundamental task in communication systems as the accurate identification of modulation schemes is essential for reliable signal processing, interference mitigation for coexistent communication technologies, and network optimization. Incorporating deep learning (DL) models into modulation recognition has demonstrated promising results in various scenarios. However, conventional DL models often fall short in online dynamic contexts, particularly in class incremental scenarios where new modulation schemes are encountered during online deployment. Retraining these models on all previously seen modulation schemes is not only time-consuming but may also not be feasible due to storage limitations. On the other hand, training solely on new modulation schemes often results in catastrophic forgetting of previously learned classes. This issue renders DL-based modulation recognition models inapplicable in real-world scenarios because the dynamic nature of communication systems necessitate the effective adaptability to new modulation schemes. This paper addresses this challenge by evaluating the performance of multiple Incremental Learning (IL) algorithms in dynamic modulation recognition scenarios, comparing them against conventional DL-based modulation recognition. Our results demonstrate that modulation recognition frameworks based on IL effectively prevent catastrophic forgetting, enabling models to perform robustly in dynamic scenarios.
Faster and Accurate Neural Networks with Semantic Inference
Oct 03, 2023



Deep neural networks (DNN) usually come with a significant computational burden. While approaches such as structured pruning and mobile-specific DNNs have been proposed, they incur drastic accuracy loss. In this paper we leverage the intrinsic redundancy in latent representations to reduce the computational load with limited loss in performance. We show that semantically similar inputs share many filters, especially in the earlier layers. Thus, semantically similar classes can be clustered to create cluster-specific subgraphs. To this end, we propose a new framework called Semantic Inference (SINF). In short, SINF (i) identifies the semantic cluster the object belongs to using a small additional classifier and (ii) executes the subgraph extracted from the base DNN related to that semantic cluster for inference. To extract each cluster-specific subgraph, we propose a new approach named Discriminative Capability Score (DCS) that finds the subgraph with the capability to discriminate among the members of a specific semantic cluster. DCS is independent from SINF and can be applied to any DNN. We benchmark the performance of DCS on the VGG16, VGG19, and ResNet50 DNNs trained on the CIFAR100 dataset against 6 state-of-the-art pruning approaches. Our results show that (i) SINF reduces the inference time of VGG19, VGG16, and ResNet50 respectively by up to 35%, 29% and 15% with only 0.17%, 3.75%, and 6.75% accuracy loss (ii) DCS achieves respectively up to 3.65%, 4.25%, and 2.36% better accuracy with VGG16, VGG19, and ResNet50 with respect to existing discriminative scores (iii) when used as a pruning criterion, DCS achieves up to 8.13% accuracy gain with 5.82% less parameters than the existing state of the art work published at ICLR 2023 (iv) when considering per-cluster accuracy, SINF performs on average 5.73%, 8.38% and 6.36% better than the base VGG16, VGG19, and ResNet50.
Attention-based Open RAN Slice Management using Deep Reinforcement Learning
Jun 15, 2023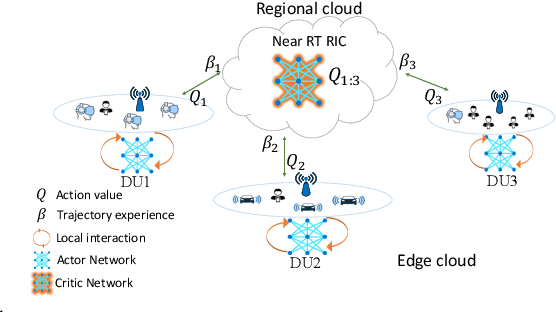
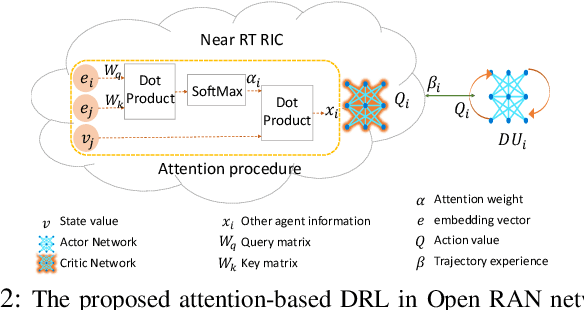
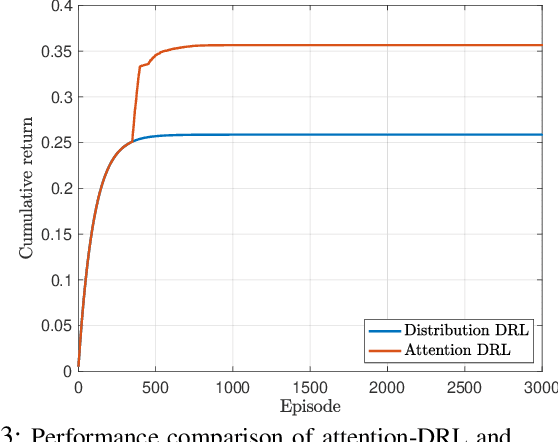
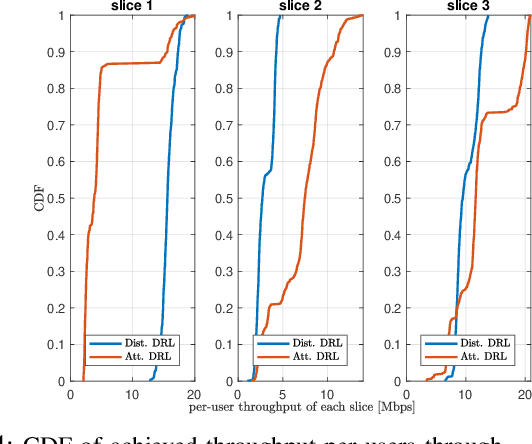
As emerging networks such as Open Radio Access Networks (O-RAN) and 5G continue to grow, the demand for various services with different requirements is increasing. Network slicing has emerged as a potential solution to address the different service requirements. However, managing network slices while maintaining quality of services (QoS) in dynamic environments is a challenging task. Utilizing machine learning (ML) approaches for optimal control of dynamic networks can enhance network performance by preventing Service Level Agreement (SLA) violations. This is critical for dependable decision-making and satisfying the needs of emerging networks. Although RL-based control methods are effective for real-time monitoring and controlling network QoS, generalization is necessary to improve decision-making reliability. This paper introduces an innovative attention-based deep RL (ADRL) technique that leverages the O-RAN disaggregated modules and distributed agent cooperation to achieve better performance through effective information extraction and implementing generalization. The proposed method introduces a value-attention network between distributed agents to enable reliable and optimal decision-making. Simulation results demonstrate significant improvements in network performance compared to other DRL baseline methods.
A Meta-learning based Generalizable Indoor Localization Model using Channel State Information
May 22, 2023



Indoor localization has gained significant attention in recent years due to its various applications in smart homes, industrial automation, and healthcare, especially since more people rely on their wireless devices for location-based services. Deep learning-based solutions have shown promising results in accurately estimating the position of wireless devices in indoor environments using wireless parameters such as Channel State Information (CSI) and Received Signal Strength Indicator (RSSI). However, despite the success of deep learning-based approaches in achieving high localization accuracy, these models suffer from a lack of generalizability and can not be readily-deployed to new environments or operate in dynamic environments without retraining. In this paper, we propose meta-learning-based localization models to address the lack of generalizability that persists in conventionally trained DL-based localization models. Furthermore, since meta-learning algorithms require diverse datasets from several different scenarios, which can be hard to collect in the context of localization, we design and propose a new meta-learning algorithm, TB-MAML (Task Biased Model Agnostic Meta Learning), intended to further improve generalizability when the dataset is limited. Lastly, we evaluate the performance of TB-MAML-based localization against conventionally trained localization models and localization done using other meta-learning algorithms.
A$^2$-UAV: Application-Aware Content and Network Optimization of Edge-Assisted UAV Systems
Jan 16, 2023To perform advanced surveillance, Unmanned Aerial Vehicles (UAVs) require the execution of edge-assisted computer vision (CV) tasks. In multi-hop UAV networks, the successful transmission of these tasks to the edge is severely challenged due to severe bandwidth constraints. For this reason, we propose a novel A$^2$-UAV framework to optimize the number of correctly executed tasks at the edge. In stark contrast with existing art, we take an application-aware approach and formulate a novel pplication-Aware Task Planning Problem (A$^2$-TPP) that takes into account (i) the relationship between deep neural network (DNN) accuracy and image compression for the classes of interest based on the available dataset, (ii) the target positions, (iii) the current energy/position of the UAVs to optimize routing, data pre-processing and target assignment for each UAV. We demonstrate A$^2$-TPP is NP-Hard and propose a polynomial-time algorithm to solve it efficiently. We extensively evaluate A$^2$-UAV through real-world experiments with a testbed composed by four DJI Mavic Air 2 UAVs. We consider state-of-the-art image classification tasks with four different DNN models (i.e., DenseNet, ResNet152, ResNet50 and MobileNet-V2) and object detection tasks using YoloV4 trained on the ImageNet dataset. Results show that A$^2$-UAV attains on average around 38% more accomplished tasks than the state-of-the-art, with 400% more accomplished tasks when the number of targets increases significantly. To allow full reproducibility, we pledge to share datasets and code with the research community.
ReWiS: Reliable Wi-Fi Sensing Through Few-Shot Multi-Antenna Multi-Receiver CSI Learning
Jan 03, 2022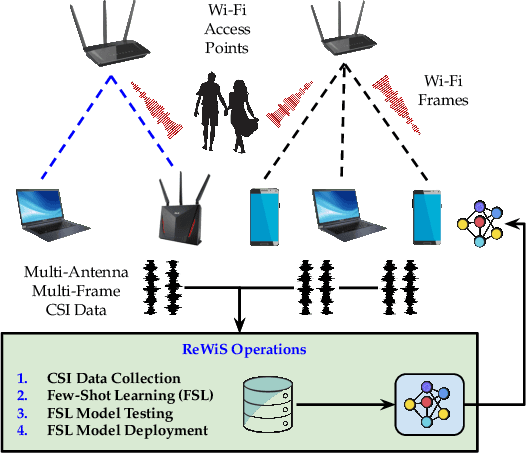
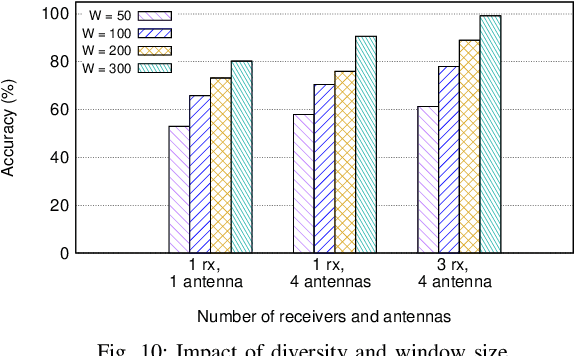
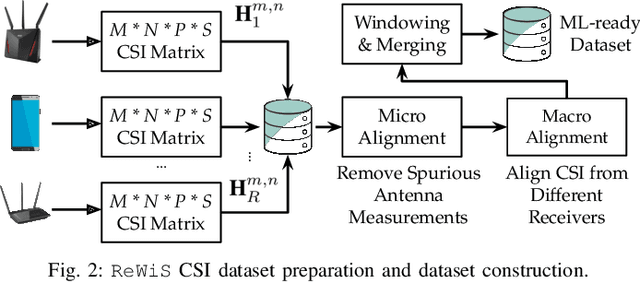
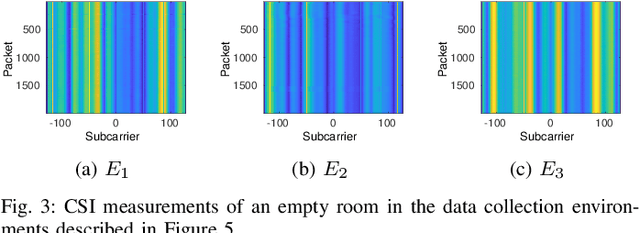
Thanks to the ubiquitousness of Wi-Fi access points and devices, Wi-Fi sensing enables transformative applications in remote health care, security, and surveillance. Existing work has explored the usage of machine learning on channel state information (CSI) computed from Wi-Fi packets to classify events of interest. However, most of these algorithms require a significant amount of data collection, as well as extensive computational power for additional CSI feature extraction. Moreover, the majority of these models suffer from poor accuracy when tested in a new/untrained environment. In this paper, we propose ReWiS, a novel framework for robust and environment-independent Wi-Fi sensing. The key innovation of ReWiS is to leverage few-shot learning (FSL) as the inference engine, which (i) reduces the need for extensive data collection and application-specific feature extraction; (ii) can rapidly generalize to new tasks by leveraging only a few new samples. We prototype ReWiS using off-the-shelf Wi-Fi equipment and showcase its performance by considering a compelling use case of human activity recognition. Thus, we perform an extensive data collection campaign in three different propagation environments with two human subjects. We evaluate the impact of each diversity component on the performance and compare ReWiS with a traditional convolutional neural network (CNN) approach. Experimental results show that ReWiS improves the performance by about 40% with respect to existing single-antenna low-resolution approaches. Moreover, when compared to a CNN-based approach, ReWiS shows a 35% more accuracy and less than 10% drop in accuracy when tested in different environments, while the CNN drops by more than 45%.
An Autonomous Spectrum Management Scheme for Unmanned Aerial Vehicle Networks in Disaster Relief Operations
Nov 26, 2019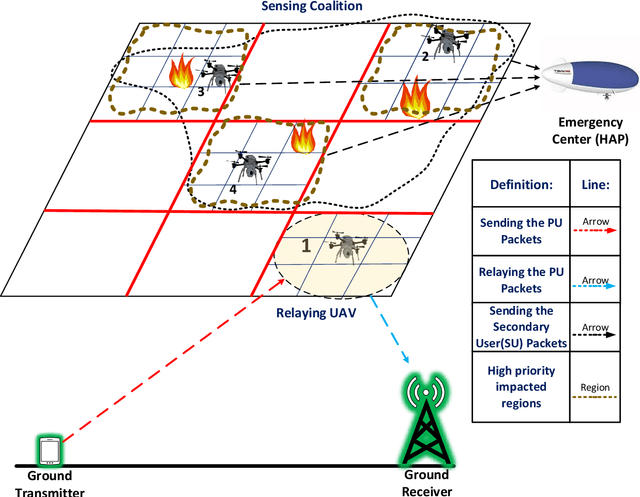
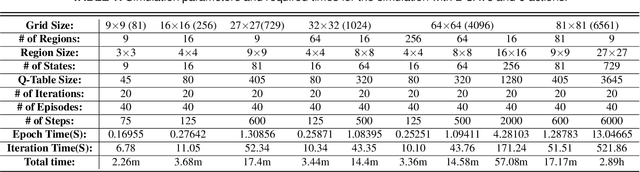
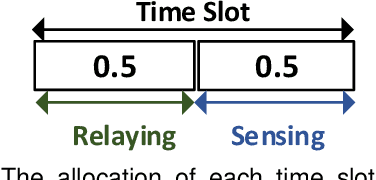
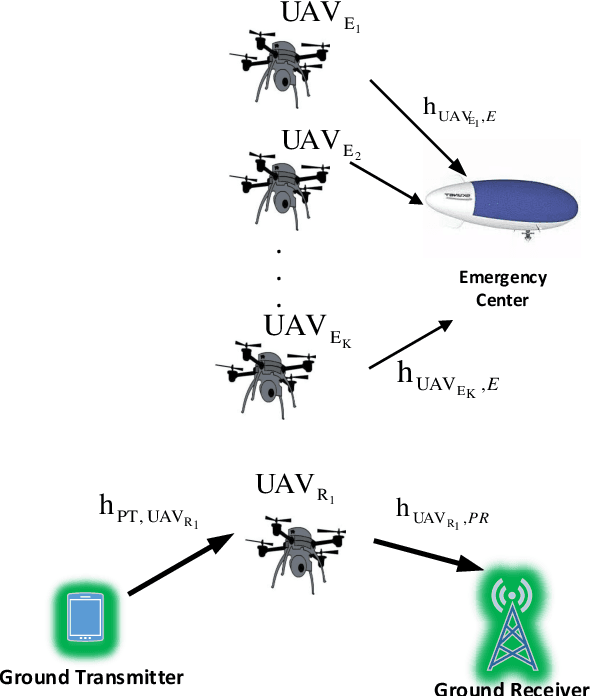
This paper studies the problem of spectrum shortage in an unmanned aerial vehicle (UAV) network during critical missions such as wildfire monitoring, search and rescue, and disaster monitoring. Such applications involve a high demand for high-throughput data transmissions such as real-time video-, image-, and voice- streaming where the assigned spectrum to the UAV network may not be adequate to provide the desired Quality of Service (QoS). In these scenarios, the aerial network can borrow an additional spectrum from the available terrestrial networks in the trade of a relaying service for them. We propose a spectrum sharing model in which the UAVs are grouped into two classes of relaying UAVs that service the spectrum owner and the sensing UAVs that perform the disaster relief mission using the obtained spectrum. The operation of the UAV network is managed by a hierarchical mechanism in which a central controller assigns the tasks of the UAVs based on their resources and determine their operation region based on the level of priority of impacted areas and then the UAVs autonomously fine-tune their position using a model-free reinforcement learning algorithm to maximize the individual throughput and prolong their lifetime. We analyze the performance and the convergence for the proposed method analytically and with extensive simulations in different scenarios.