 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinated Anti-Jamming Resilience in Swarm Networks via Multi-Agent Reinforcement Learning
Dec 18, 2025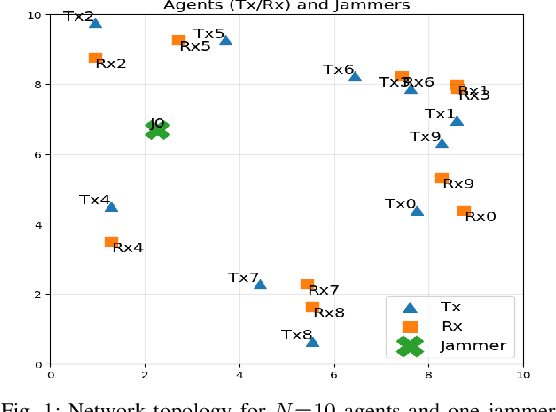
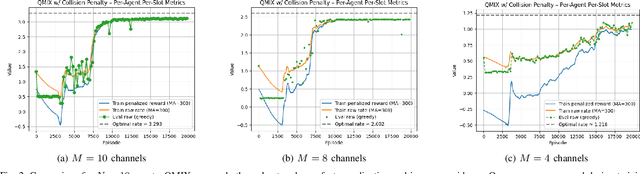
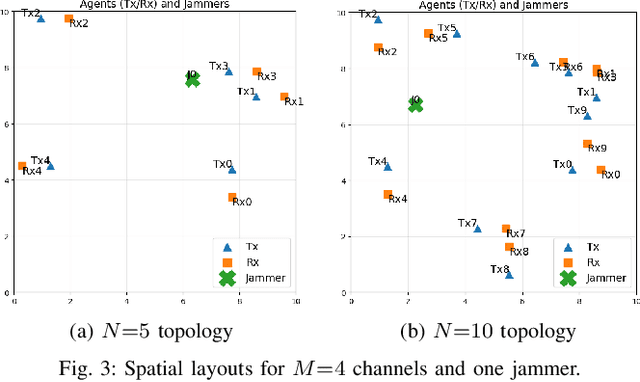
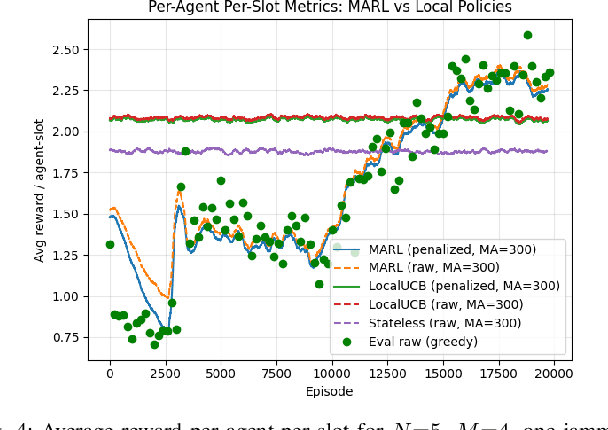
Reactive jammers pose a severe security threat to robotic-swarm networks by selectively disrupting inter-agent communications and undermining formation integrity and mission success. Conventional countermeasures such as fixed power control or static channel hopping are largely ineffective against such adaptive adversaries. This paper presents a multi-agent reinforcement learning (MARL) framework based on the QMIX algorithm to improve the resilience of swarm communications under reactive jamming. We consider a network of multiple transmitter-receiver pairs sharing channels while a reactive jammer with Markovian threshold dynamics senses aggregate power and reacts accordingly. Each agent jointly selects transmit frequency (channel) and power, and QMIX learns a centralized but factorizable action-value function that enables coordinated yet decentralized execution. We benchmark QMIX against a genie-aided optimal policy in a no-channel-reuse setting, and against local Upper Confidence Bound (UCB) and a stateless reactive policy in a more general fading regime with channel reuse enabled. Simulation results show that QMIX rapidly converges to cooperative policies that nearly match the genie-aided bound, while achieving higher throughput and lower jamming incidence than the baselines, thereby demonstrating MARL's effectiveness for securing autonomous swarms in contested environments.
How to Combat Reactive and Dynamic Jamming Attacks with Reinforcement Learning
Oct 02, 2025This paper studies the problem of mitigating reactive jamming, where a jammer adopts a dynamic policy of selecting channels and sensing thresholds to detect and jam ongoing transmissions. The transmitter-receiver pair learns to avoid jamming and optimize throughput over time (without prior knowledge of channel conditions or jamming strategies) by using reinforcement learning (RL) to adapt transmit power, modulation, and channel selection. Q-learning is employed for discrete jamming-event states, while Deep Q-Networks (DQN) are employed for continuous states based on received power. Through different reward functions and action sets, the results show that RL can adapt rapidly to spectrum dynamics and sustain high rates as channels and jamming policies change over time.
MULTI-SCOUT: Multistatic Integrated Sensing and Communications in 5G and Beyond for Moving Target Detection, Positioning, and Tracking
Jul 03, 2025This paper presents a complete signal-processing chain for multistatic integrated sensing and communications (ISAC) using 5G Positioning Reference Signal (PRS). We consider a distributed architecture in which one gNB transmits a periodic OFDM-PRS waveform while multiple spatially separated receivers exploit the same signal for target detection, parameter estimation and tracking. A coherent cross-ambiguity function (CAF) is evaluated to form a range-Doppler map from which the bistatic delay and radial velocity are extracted for every target. For a single target, the resulting bistatic delays are fused through nonlinear least-squares trilateration, yielding a geometric position estimate, and a regularized linear inversion of the radial-speed equations yields a two-dimensional velocity vector, where speed and heading are obtained. The approach is applied to 2D and 3D settings, extended to account for time synchronization bias, and generalized to multiple targets by resolving target association. The sequence of position-velocity estimates is then fed to standard and extended Kalman filters to obtain smoothed tracks. Our results show high-fidelity moving-target detection, positioning, and tracking using 5G PRS signals for multistatic ISAC.
Distributed Federated Learning for Vehicular Network Security: Anomaly Detection Benefits and Multi-Domain Attack Threats
May 29, 2025In connected and autonomous vehicles, machine learning for safety message classification has become critical for detecting malicious or anomalous behavior. However, conventional approaches that rely on centralized data collection or purely local training face limitations due to the large scale, high mobility, and heterogeneous data distributions inherent in inter-vehicle networks. To overcome these challenges, this paper explores Distributed Federated Learning (DFL), whereby vehicles collaboratively train deep learning models by exchanging model updates among one-hop neighbors and propagating models over multiple hops. Using the Vehicular Reference Misbehavior (VeReMi) Extension Dataset, we show that DFL can significantly improve classification accuracy across all vehicles compared to learning strictly with local data. Notably, vehicles with low individual accuracy see substantial accuracy gains through DFL, illustrating the benefit of knowledge sharing across the network. We further show that local training data size and time-varying network connectivity correlate strongly with the model's overall accuracy. We investigate DFL's resilience and vulnerabilities under attacks in multiple domains, namely wireless jamming and training data poisoning attacks. Our results reveal important insights into the vulnerabilities of DFL when confronted with multi-domain attacks, underlining the need for more robust strategies to secure DFL in vehicular networks.
Adversarial Attack and Defense for LoRa Device Identification and Authentication via Deep Learning
Dec 30, 2024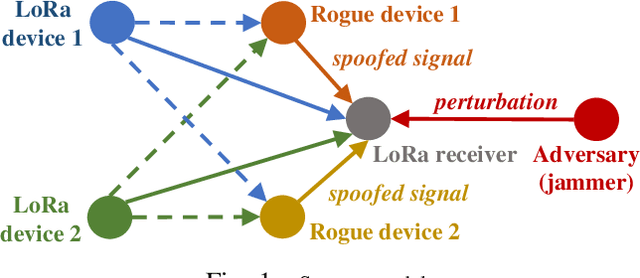
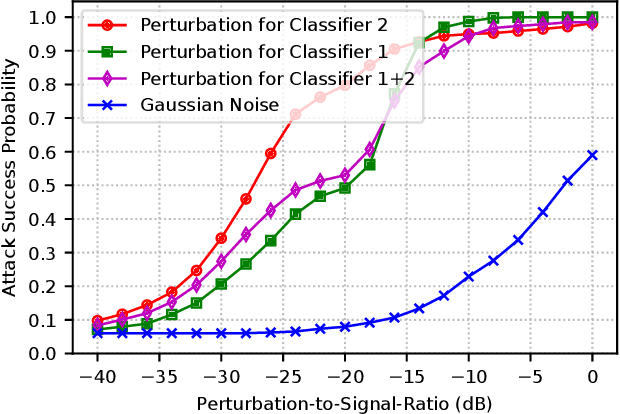
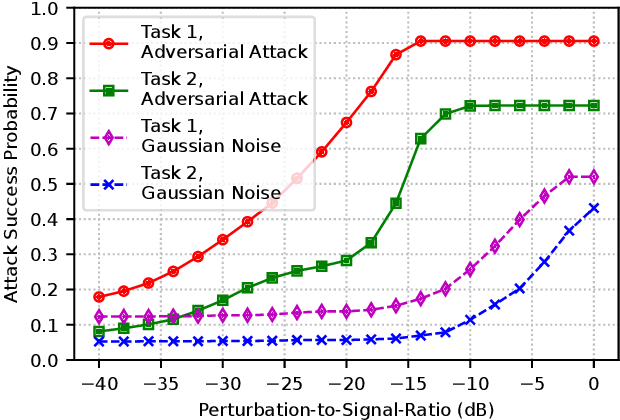
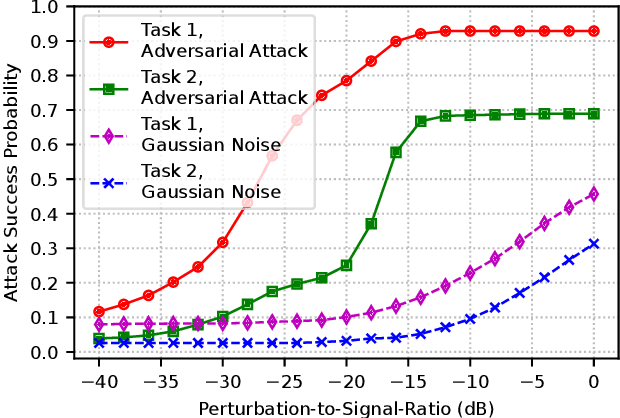
LoRa provides long-range, energy-efficient communications in Internet of Things (IoT) applications that rely on Low-Power Wide-Area Network (LPWAN) capabilities. Despite these merits, concerns persist regarding the security of LoRa networks, especially in situations where device identification and authentication are imperative to secure the reliable access to the LoRa networks. This paper explores a deep learning (DL) approach to tackle these concerns, focusing on two critical tasks, namely (i) identifying LoRa devices and (ii) classifying them to legitimate and rogue devices. Deep neural networks (DNNs), encompassing both convolutional and feedforward neural networks, are trained for these tasks using actual LoRa signal data. In this setting, the adversaries may spoof rogue LoRa signals through the kernel density estimation (KDE) method based on legitimate device signals that are received by the adversaries. Two cases are considered, (i) training two separate classifiers, one for each of the two tasks, and (ii) training a multi-task classifier for both tasks. The vulnerabilities of the resulting DNNs to manipulations in input samples are studied in form of untargeted and targeted adversarial attacks using the Fast Gradient Sign Method (FGSM). Individual and common perturbations are considered against single-task and multi-task classifiers for the LoRa signal analysis. To provide resilience against such attacks, a defense approach is presented by increasing the robustness of classifiers with adversarial training. Results quantify how vulnerable LoRa signal classification tasks are to adversarial attacks and emphasize the need to fortify IoT applications against these subtle yet effective threats.
Low-Latency Task-Oriented Communications with Multi-Round, Multi-Task Deep Learning
Nov 15, 2024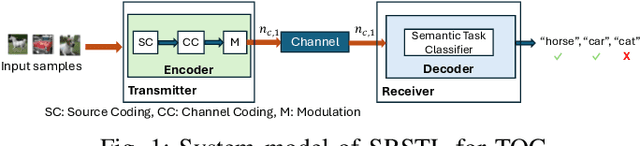
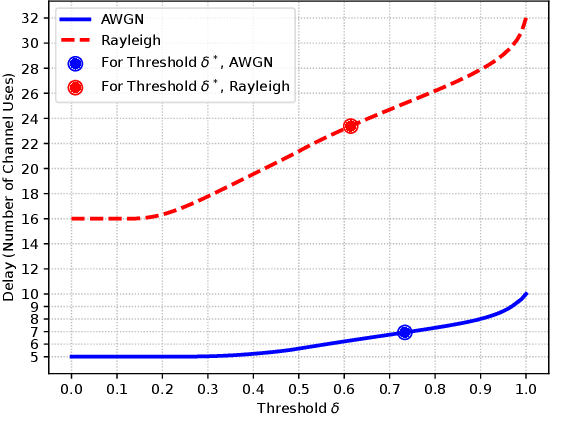
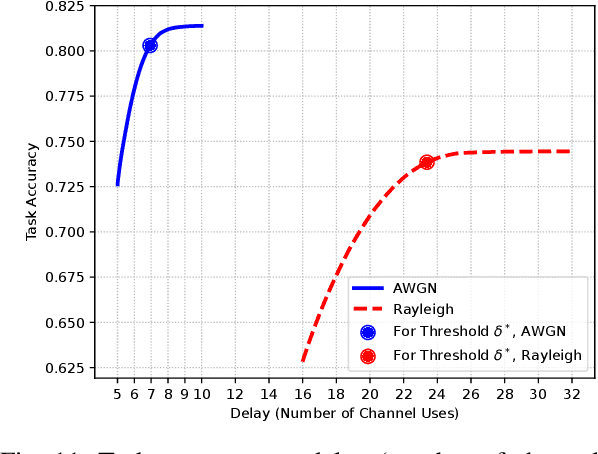
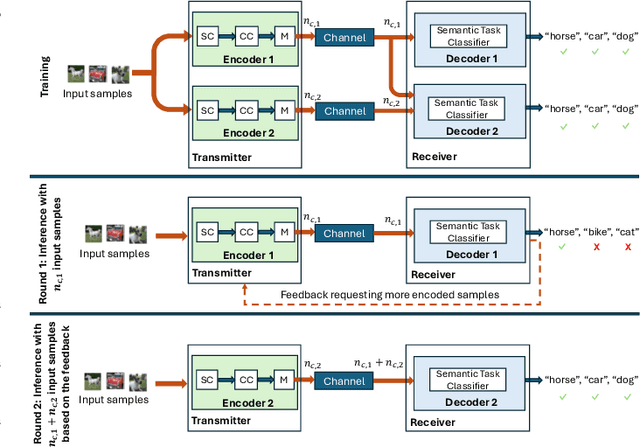
In this paper, we address task-oriented (or goal-oriented) communications where an encoder at the transmitter learns compressed latent representations of data, which are then transmitted over a wireless channel. At the receiver, a decoder performs a machine learning task, specifically for classifying the received signals. The deep neural networks corresponding to the encoder-decoder pair are jointly trained, taking both channel and data characteristics into account. Our objective is to achieve high accuracy in completing the underlying task while minimizing the number of channel uses determined by the encoder's output size. To this end, we propose a multi-round, multi-task learning (MRMTL) approach for the dynamic update of channel uses in multi-round transmissions. The transmitter incrementally sends an increasing number of encoded samples over the channel based on the feedback from the receiver, and the receiver utilizes the signals from a previous round to enhance the task performance, rather than only considering the latest transmission. This approach employs multi-task learning to jointly optimize accuracy across varying number of channel uses, treating each configuration as a distinct task. By evaluating the confidence of the receiver in task decisions, MRMTL decides on whether to allocate additional channel uses in multiple rounds. We characterize both the accuracy and the delay (total number of channel uses) of MRMTL, demonstrating that it achieves the accuracy close to that of conventional methods requiring large numbers of channel uses, but with reduced delay by incorporating signals from a prior round. We consider the CIFAR-10 dataset, convolutional neural network architectures, and AWGN and Rayleigh channel models for performance evaluation. We show that MRMTL significantly improves the efficiency of task-oriented communications, balancing accuracy and latency effectively.
Augmenting Training Data with Vector-Quantized Variational Autoencoder for Classifying RF Signals
Oct 23, 2024



Radio frequency (RF) communication has been an important part of civil and military communication for decades. With the increasing complexity of wireless environments and the growing number of devices sharing the spectrum, it has become critical to efficiently manage and classify the signals that populate these frequencies. In such scenarios, the accurate classification of wireless signals is essential for effective spectrum management, signal interception, and interference mitigation. However, the classification of wireless RF signals often faces challenges due to the limited availability of labeled training data, especially under low signal-to-noise ratio (SNR) conditions. To address these challenges, this paper proposes the use of a Vector-Quantized Variational Autoencoder (VQ-VAE) to augment training data, thereby enhancing the performance of a baseline wireless classifier. The VQ-VAE model generates high-fidelity synthetic RF signals, increasing the diversity and fidelity of the training dataset by capturing the complex variations inherent in RF communication signals. Our experimental results show that incorporating VQ-VAE-generated data significantly improves the classification accuracy of the baseline model, particularly in low SNR conditions. This augmentation leads to better generalization and robustness of the classifier, overcoming the constraints imposed by limited real-world data. By improving RF signal classification, the proposed approach enhances the efficacy of wireless communication in both civil and tactical settings, ensuring reliable and secure operations. This advancement supports critical decision-making and operational readiness in environments where communication fidelity is essential.
Continual Deep Reinforcement Learning to Prevent Catastrophic Forgetting in Jamming Mitigation
Oct 14, 2024



Deep Reinforcement Learning (DRL) has been highly effective in learning from and adapting to RF environments and thus detecting and mitigating jamming effects to facilitate reliable wireless communications. However, traditional DRL methods are susceptible to catastrophic forgetting (namely forgetting old tasks when learning new ones), especially in dynamic wireless environments where jammer patterns change over time. This paper considers an anti-jamming system and addresses the challenge of catastrophic forgetting in DRL applied to jammer detection and mitigation. First, we demonstrate the impact of catastrophic forgetting in DRL when applied to jammer detection and mitigation tasks, where the network forgets previously learned jammer patterns while adapting to new ones. This catastrophic interference undermines the effectiveness of the system, particularly in scenarios where the environment is non-stationary. We present a method that enables the network to retain knowledge of old jammer patterns while learning to handle new ones. Our approach substantially reduces catastrophic forgetting, allowing the anti-jamming system to learn new tasks without compromising its ability to perform previously learned tasks effectively. Furthermore, we introduce a systematic methodology for sequentially learning tasks in the anti-jamming framework. By leveraging continual DRL techniques based on PackNet, we achieve superior anti-jamming performance compared to standard DRL methods. Our proposed approach not only addresses catastrophic forgetting but also enhances the adaptability and robustness of the system in dynamic jamming environments. We demonstrate the efficacy of our method in preserving knowledge of past jammer patterns, learning new tasks efficiently, and achieving superior anti-jamming performance compared to traditional DRL approaches.
I-SCOUT: Integrated Sensing and Communications to Uncover Moving Targets in NextG Networks
Oct 11, 2024Integrated Sensing and Communication (ISAC) represents a transformative approach within 5G and beyond, aiming to merge wireless communication and sensing functionalities into a unified network infrastructure. This integration offers enhanced spectrum efficiency, real-time situational awareness, cost and energy reductions, and improved operational performance. ISAC provides simultaneous communication and sensing capabilities, enhancing the ability to detect, track, and respond to spectrum dynamics and potential threats in complex environments. In this paper, we introduce I-SCOUT, an innovative ISAC solution designed to uncover moving targets in NextG networks. We specifically repurpose the Positioning Reference Signal (PRS) of the 5G waveform, exploiting its distinctive autocorrelation characteristics for environment sensing. The reflected signals from moving targets are processed to estimate both the range and velocity of these targets using the cross ambiguity function (CAF). We conduct an in-depth analysis of the tradeoff between sensing and communication functionalities, focusing on the allocation of PRSs for ISAC purposes. Our study reveals that the number of PRSs dedicated to ISAC has a significant impact on the system's performance, necessitating a careful balance to optimize both sensing accuracy and communication efficiency. Our results demonstrate that I-SCOUT effectively leverages ISAC to accurately determine the range and velocity of moving targets. Moreover, I-SCOUT is capable of distinguishing between multiple targets within a group, showcasing its potential for complex scenarios. These findings underscore the viability of ISAC in enhancing the capabilities of NextG networks, for both commercial and tactical applications where precision and reliability are critical.
Will 6G be Semantic Communications? Opportunities and Challenges from Task Oriented and Secure Communications to Integrated Sensing
Jan 03, 2024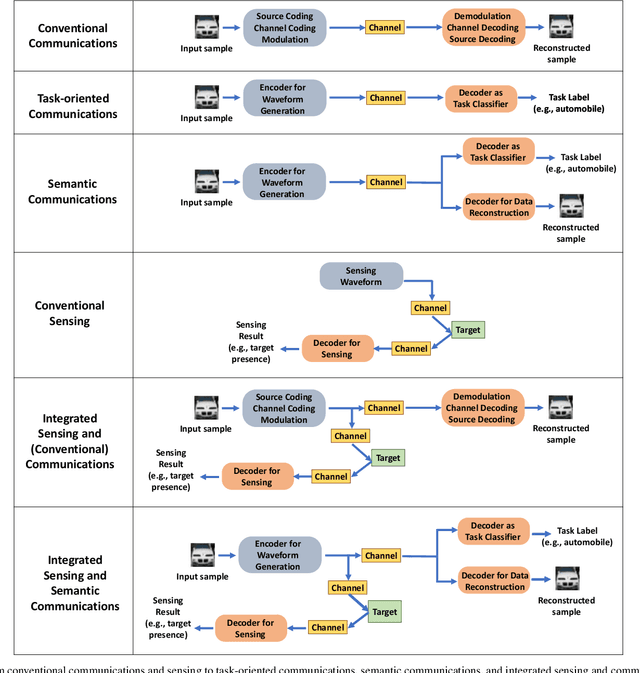
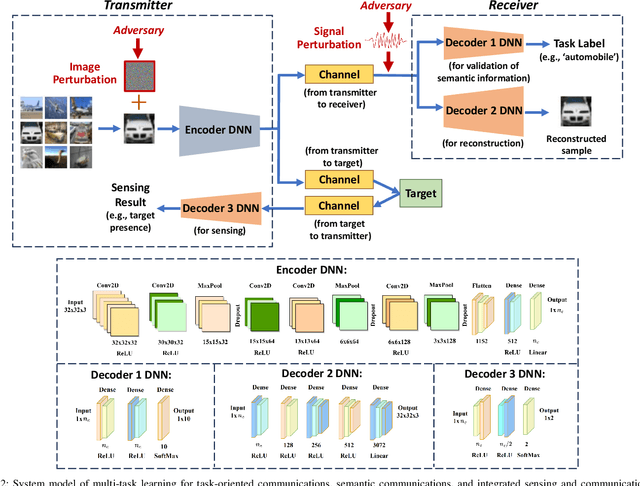
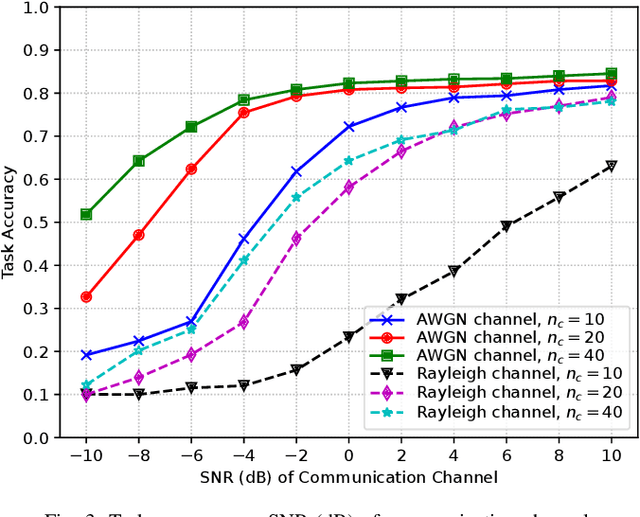
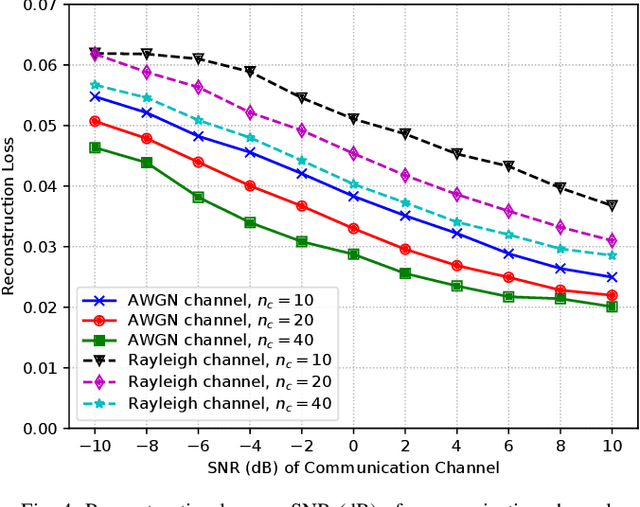
This paper explores opportunities and challenges of task (goal)-oriented and semantic communications for next-generation (NextG) communication networks through the integration of multi-task learning. This approach employs deep neural networks representing a dedicated encoder at the transmitter and multiple task-specific decoders at the receiver, collectively trained to handle diverse tasks including semantic information preservation, source input reconstruction, and integrated sensing and communications. To extend the applicability from point-to-point links to multi-receiver settings, we envision the deployment of decoders at various receivers, where decentralized learning addresses the challenges of communication load and privacy concerns, leveraging federated learning techniques that distribute model updates across decentralized nodes. However, the efficacy of this approach is contingent on the robustness of the employed deep learning models. We scrutinize potential vulnerabilities stemming from adversarial attacks during both training and testing phases. These attacks aim to manipulate both the inputs at the encoder at the transmitter and the signals received over the air on the receiver side, highlighting the importance of fortifying semantic communications against potential multi-domain exploits. Overall, the joint and robust design of task-oriented communications, semantic communications, and integrated sensing and communications in a multi-task learning framework emerges as the key enabler for context-aware, resource-efficient, and secure communications ultimately needed in NextG network systems.