 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Latent Knowledge of Public Tabular Datasets in Large Language Models
Oct 23, 2025Large Language Models (LLMs) are increasingly evaluated on their ability to reason over structured data, yet such assessments often overlook a crucial confound: dataset contamination. In this work, we investigate whether LLMs exhibit prior knowledge of widely used tabular benchmarks such as Adult Income, Titanic, and others. Through a series of controlled probing experiments, we reveal that contamination effects emerge exclusively for datasets containing strong semantic cues-for instance, meaningful column names or interpretable value categories. In contrast, when such cues are removed or randomized, performance sharply declines to near-random levels. These findings suggest that LLMs' apparent competence on tabular reasoning tasks may, in part, reflect memorization of publicly available datasets rather than genuine generalization. We discuss implications for evaluation protocols and propose strategies to disentangle semantic leakage from authentic reasoning ability in future LLM assessments.
Generalizability vs. Counterfactual Explainability Trade-Off
May 29, 2025In this work, we investigate the relationship between model generalization and counterfactual explainability in supervised learning. We introduce the notion of $\varepsilon$-valid counterfactual probability ($\varepsilon$-VCP) -- the probability of finding perturbations of a data point within its $\varepsilon$-neighborhood that result in a label change. We provide a theoretical analysis of $\varepsilon$-VCP in relation to the geometry of the model's decision boundary, showing that $\varepsilon$-VCP tends to increase with model overfitting. Our findings establish a rigorous connection between poor generalization and the ease of counterfactual generation, revealing an inherent trade-off between generalization and counterfactual explainability. Empirical results validate our theory, suggesting $\varepsilon$-VCP as a practical proxy for quantitatively characterizing overfitting.
Generalizability through Explainability: Countering Overfitting with Counterfactual Examples
Feb 13, 2025



Overfitting is a well-known issue in machine learning that occurs when a model struggles to generalize its predictions to new, unseen data beyond the scope of its training set. Traditional techniques to mitigate overfitting include early stopping, data augmentation, and regularization. In this work, we demonstrate that the degree of overfitting of a trained model is correlated with the ability to generate counterfactual examples. The higher the overfitting, the easier it will be to find a valid counterfactual example for a randomly chosen input data point. Therefore, we introduce CF-Reg, a novel regularization term in the training loss that controls overfitting by ensuring enough margin between each instance and its corresponding counterfactual. Experiments conducted across multiple datasets and models show that our counterfactual regularizer generally outperforms existing regularization techniques.
Natural Language Counterfactual Explanations for Graphs Using Large Language Models
Oct 11, 2024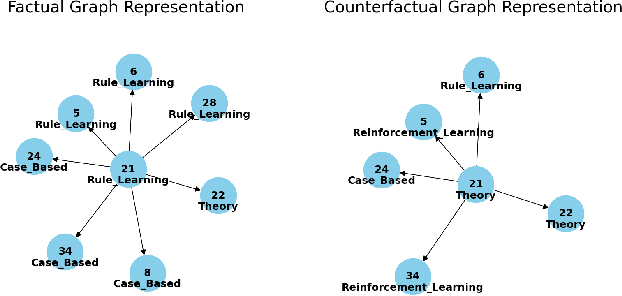


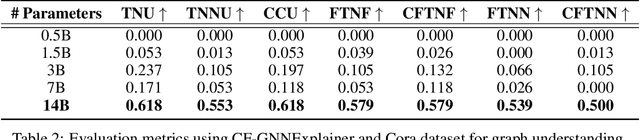
Explainable Artificial Intelligence (XAI) has emerged as a critical area of research to unravel the opaque inner logic of (deep) machine learning models. Among the various XAI techniques proposed in the literature, counterfactual explanations stand out as one of the most promising approaches. However, these ``what-if'' explanations are frequently complex and technical, making them difficult for non-experts to understand and, more broadly, challenging for humans to interpret. To bridge this gap, in this work, we exploit the power of open-source Large Language Models to generate natural language explanations when prompted with valid counterfactual instances produced by state-of-the-art explainers for graph-based models. Experiments across several graph datasets and counterfactual explainers show that our approach effectively produces accurate natural language representations of counterfactual instances, as demonstrated by key performance metrics.
Expanding Boundaries: Cross-Media Routing for Seamless Underwater and Aerial Communication
Jul 24, 2023



The colossal evolution of wireless communication technologies over the past few years has driven increased interest in its integration in a variety of less-explored environments, such as the underwater medium. In this magazine paper, we present a comprehensive discussion on a novel concept of routing protocol known as cross-media routing, incorporating the marine and aerial interfaces. In this regard, we discuss the limitation of single-media routing and advocate the need for cross-media routing along with the current status of research development in this direction. To this end, we also propose a novel cross-media routing protocol known as bubble routing for autonomous marine systems where different sets of AUVs, USVs, and airborne nodes are considered for the routing problem. We evaluate the performance of the proposed routing protocol by using the two key performance metrics, i.e., packet delivery ratio (PDR) and end-to-end delay. Moreover, we delve into the challenges encountered in cross-media routing, unveiling exciting opportunities for future research and innovation. As wireless communication expands its horizons to encompass the underwater and aerial domains, understanding and addressing these challenges will pave the way for enhanced cross-media communication and exploration.
A$^2$-UAV: Application-Aware Content and Network Optimization of Edge-Assisted UAV Systems
Jan 16, 2023To perform advanced surveillance, Unmanned Aerial Vehicles (UAVs) require the execution of edge-assisted computer vision (CV) tasks. In multi-hop UAV networks, the successful transmission of these tasks to the edge is severely challenged due to severe bandwidth constraints. For this reason, we propose a novel A$^2$-UAV framework to optimize the number of correctly executed tasks at the edge. In stark contrast with existing art, we take an application-aware approach and formulate a novel pplication-Aware Task Planning Problem (A$^2$-TPP) that takes into account (i) the relationship between deep neural network (DNN) accuracy and image compression for the classes of interest based on the available dataset, (ii) the target positions, (iii) the current energy/position of the UAVs to optimize routing, data pre-processing and target assignment for each UAV. We demonstrate A$^2$-TPP is NP-Hard and propose a polynomial-time algorithm to solve it efficiently. We extensively evaluate A$^2$-UAV through real-world experiments with a testbed composed by four DJI Mavic Air 2 UAVs. We consider state-of-the-art image classification tasks with four different DNN models (i.e., DenseNet, ResNet152, ResNet50 and MobileNet-V2) and object detection tasks using YoloV4 trained on the ImageNet dataset. Results show that A$^2$-UAV attains on average around 38% more accomplished tasks than the state-of-the-art, with 400% more accomplished tasks when the number of targets increases significantly. To allow full reproducibility, we pledge to share datasets and code with the research community.