 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Zoning of Industrial Environments with Autonomous Mobile Robots
Nov 11, 2024

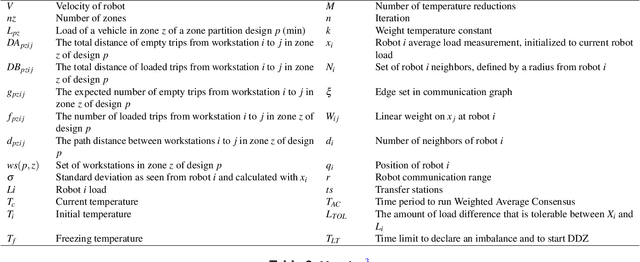
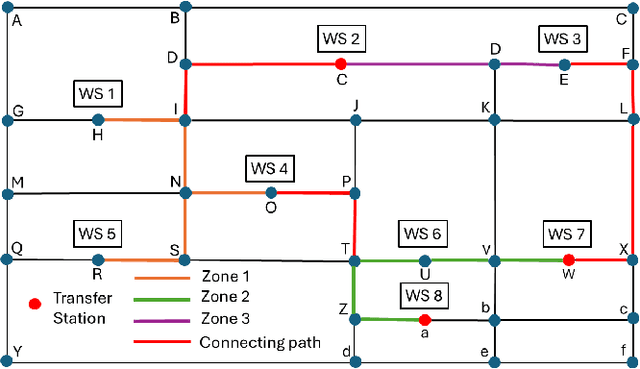
This paper presents a scheduling algorithm that divides a manufacturing/warehouse floor into zones that an Autonomous Mobile Robot (AMR) will occupy and complete part pick-up and drop-off tasks. Each zone is balanced so that each AMR will share each task equally. These zones change over time to accommodate fluctuations in production and to avoid overloading an AMR with tasks. A decentralized dynamic zoning (DDZ) algorithm is introduced to find the optimal zone design, eliminating the possibility of single-point failure from a centralized unit. Then a simulation is built comparing the adaptability of DDZ and other dynamic zoning algorithms from previous works. Initial results show that DDZ has a much lower throughput than other dynamic zoning algorithms but DDZ can achieve a better distribution of tasks. Initial results show that DDZ had a lower standard deviation of AMR total travel distance which was 2874.7 feet less than previous works. This 68.7\% decrease in standard deviation suggests that AMRs under DDZ travel a similar distance during production. This could be useful for real-world applications by making it easier to design charging and maintenance schedules without much downtime. Video demonstration of the system working can be seen here: \url{https://youtu.be/yVi026oVD7U}
Spatially temporally distributed informative path planning for multi-robot systems
Mar 25, 2024This paper investigates the problem of informative path planning for a mobile robotic sensor network in spatially temporally distributed mapping. The robots are able to gather noisy measurements from an area of interest during their movements to build a Gaussian Process (GP) model of a spatio-temporal field. The model is then utilized to predict the spatio-temporal phenomenon at different points of interest. To spatially and temporally navigate the group of robots so that they can optimally acquire maximal information gains while their connectivity is preserved, we propose a novel multistep prediction informative path planning optimization strategy employing our newly defined local cost functions. By using the dual decomposition method, it is feasible and practical to effectively solve the optimization problem in a distributed manner. The proposed method was validated through synthetic experiments utilizing real-world data sets.
Hiding in Plain Sight: Differential Privacy Noise Exploitation for Evasion-resilient Localized Poisoning Attacks in Multiagent Reinforcement Learning
Jul 13, 2023



Lately, differential privacy (DP) has been introduced in cooperative multiagent reinforcement learning (CMARL) to safeguard the agents' privacy against adversarial inference during knowledge sharing. Nevertheless, we argue that the noise introduced by DP mechanisms may inadvertently give rise to a novel poisoning threat, specifically in the context of private knowledge sharing during CMARL, which remains unexplored in the literature. To address this shortcoming, we present an adaptive, privacy-exploiting, and evasion-resilient localized poisoning attack (PeLPA) that capitalizes on the inherent DP-noise to circumvent anomaly detection systems and hinder the optimal convergence of the CMARL model. We rigorously evaluate our proposed PeLPA attack in diverse environments, encompassing both non-adversarial and multiple-adversarial contexts. Our findings reveal that, in a medium-scale environment, the PeLPA attack with attacker ratios of 20% and 40% can lead to an increase in average steps to goal by 50.69% and 64.41%, respectively. Furthermore, under similar conditions, PeLPA can result in a 1.4x and 1.6x computational time increase in optimal reward attainment and a 1.18x and 1.38x slower convergence for attacker ratios of 20% and 40%, respectively.
Automatic Parameter Optimization Using Genetic Algorithm in Deep Reinforcement Learning for Robotic Manipulation Tasks
Apr 07, 2022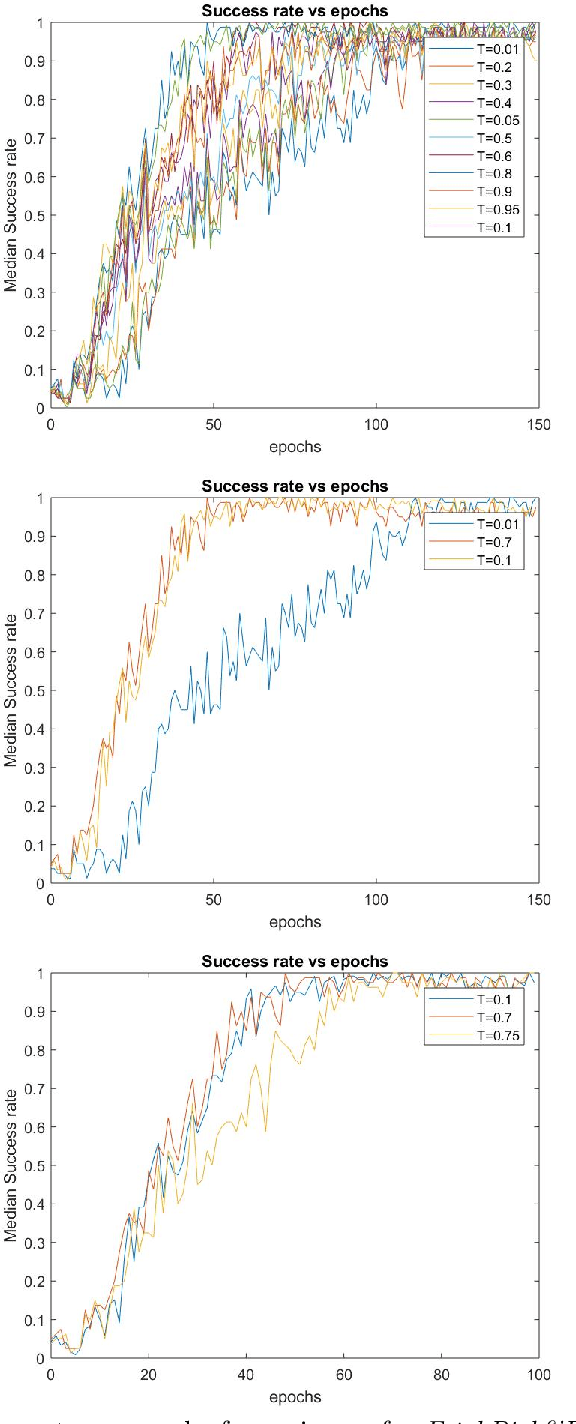
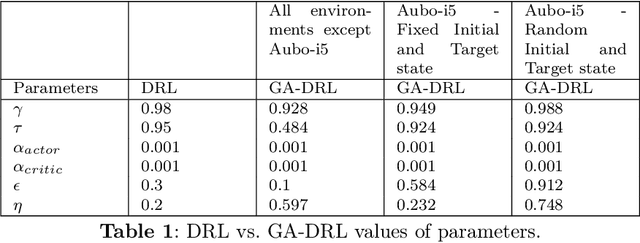
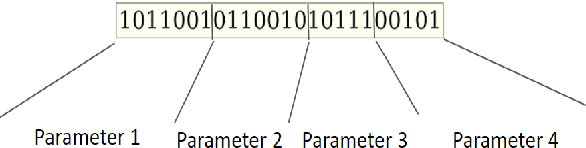
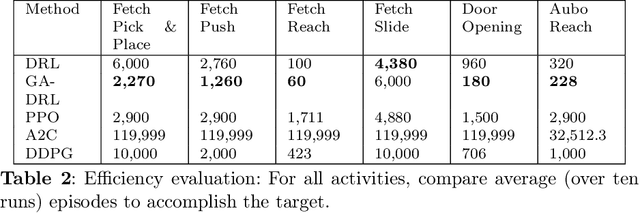
Learning agents can make use of Reinforcement Learning (RL) to decide their actions by using a reward function. However, the learning process is greatly influenced by the elect of values of the parameters used in the learning algorithm. This work proposed a Deep Deterministic Policy Gradient (DDPG) and Hindsight Experience Replay (HER) based method, which makes use of the Genetic Algorithm (GA) to fine-tune the parameters' values. This method (GA-DRL) experimented on six robotic manipulation tasks: fetch-reach; fetch-slide; fetch-push; fetch-pick and place; door-opening; and aubo-reach. Analysis of these results demonstrated a significant increase in performance and a decrease in learning time. Also, we compare and provide evidence that GA-DRL is better than the existing methods.
Registration of 3D Point Sets Using Correntropy Similarity Matrix
Jul 20, 2021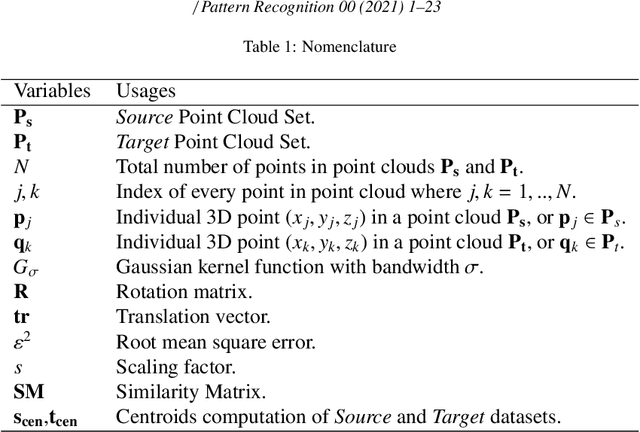
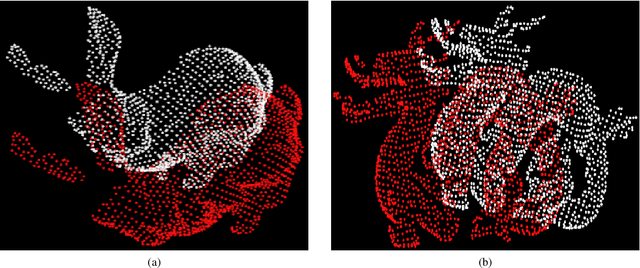
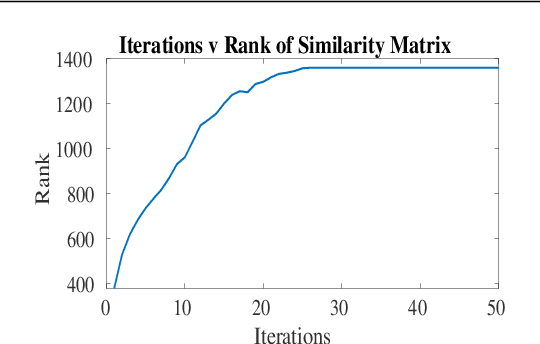
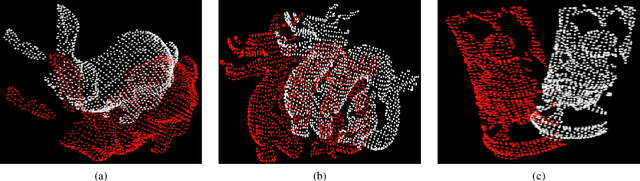
This work focuses on Registration or Alignment of 3D point sets. Although the Registration problem is a well established problem and it's solved using multiple variants of Iterative Closest Point (ICP) Algorithm, most of the approaches in the current state of the art still suffers from misalignment when the \textit{Source} and the \textit{Target} point sets are separated by large rotations and translation. In this work, we propose a variant of the Standard ICP algorithm, where we introduce a Correntropy Relationship Matrix in the computation of rotation and translation component which attempts to solve the large rotation and translation problem between \textit{Source} and \textit{Target} point sets. This matrix is created through correntropy criterion which is updated in every iteration. The correntropy criterion defined in this approach maintains the relationship between the points in the \textit{Source} dataset and the \textit{Target} dataset. Through our experiments and validation we verify that our approach has performed well under various rotation and translation in comparison to the other well-known state of the art methods available in the Point Cloud Library (PCL) as well as other methods available as open source. We have uploaded our code in the github repository for the readers to validate and verify our approach https://github.com/aralab-unr/CoSM-ICP.
Bounded Distributed Flocking Control of Nonholonomic Mobile Robots
May 11, 2017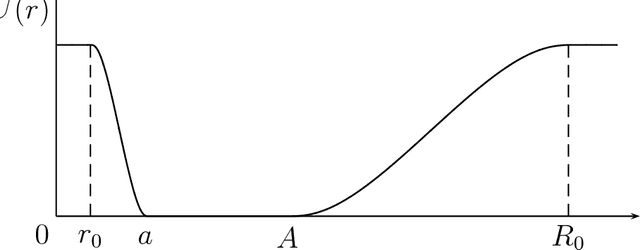
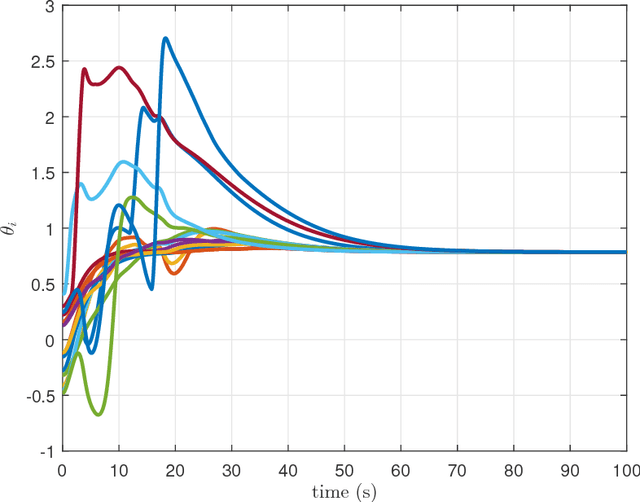
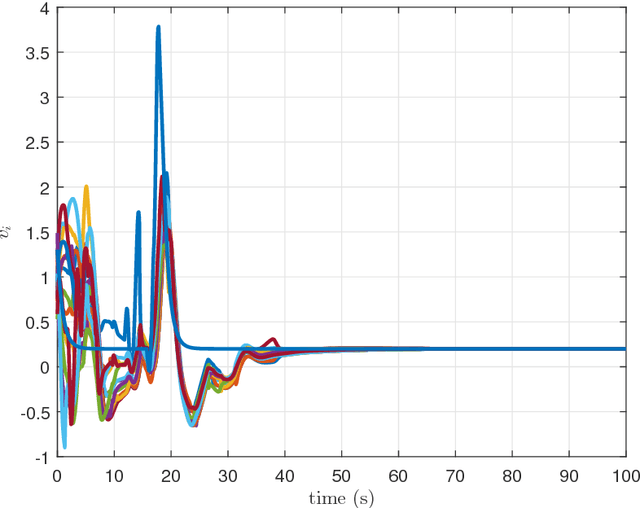
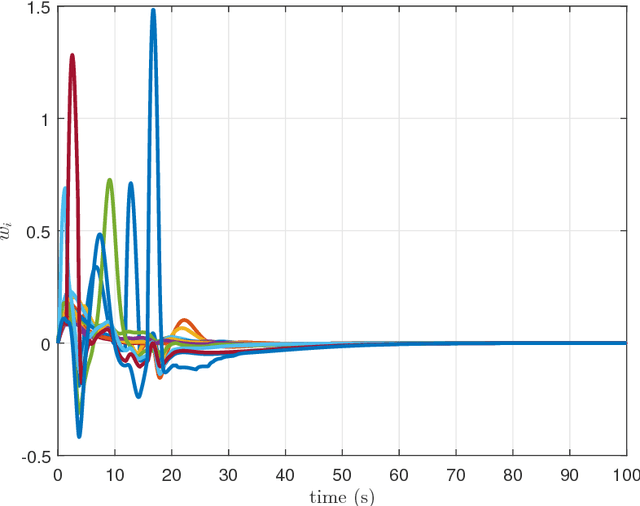
There have been numerous studies on the problem of flocking control for multiagent systems whose simplified models are presented in terms of point-mass elements. Meanwhile, full dynamic models pose some challenging problems in addressing the flocking control problem of mobile robots due to their nonholonomic dynamic properties. Taking practical constraints into consideration, we propose a novel approach to distributed flocking control of nonholonomic mobile robots by bounded feedback. The flocking control objectives consist of velocity consensus, collision avoidance, and cohesion maintenance among mobile robots. A flocking control protocol which is based on the information of neighbor mobile robots is constructed. The theoretical analysis is conducted with the help of a Lyapunov-like function and graph theory. Simulation results are shown to demonstrate the efficacy of the proposed distributed flocking control scheme.