 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBounded Distributed Flocking Control of Nonholonomic Mobile Robots
Paper and Code
May 11, 2017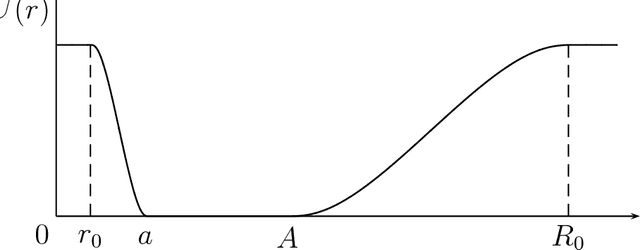
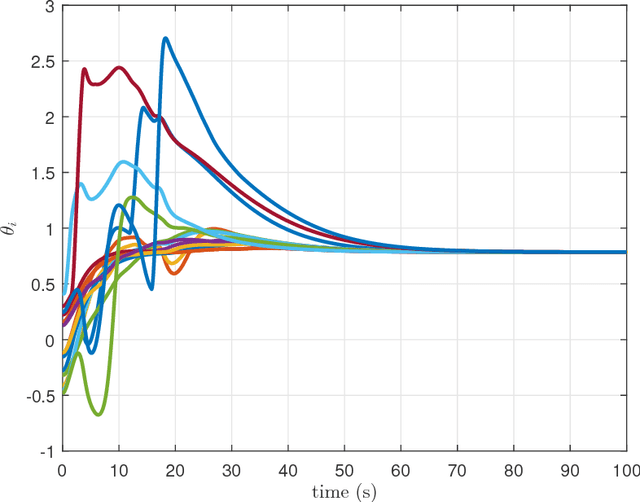
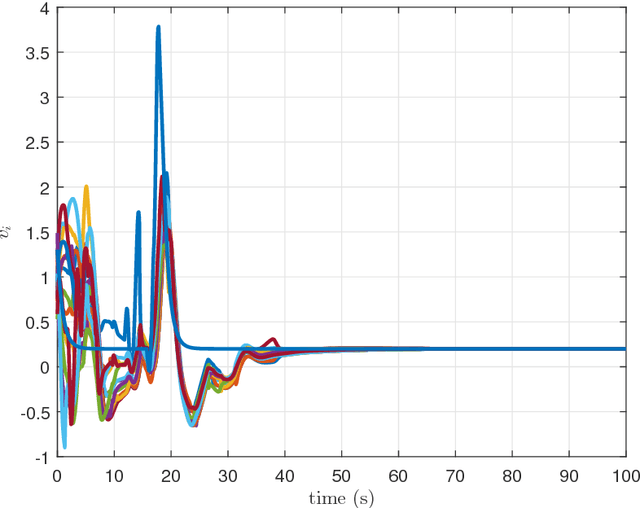
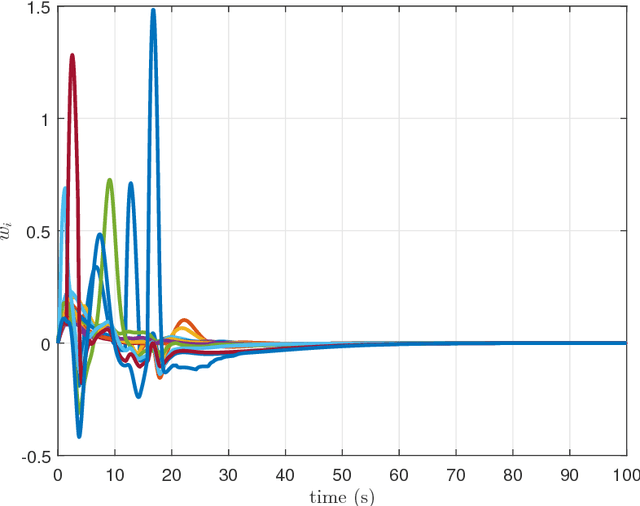
There have been numerous studies on the problem of flocking control for multiagent systems whose simplified models are presented in terms of point-mass elements. Meanwhile, full dynamic models pose some challenging problems in addressing the flocking control problem of mobile robots due to their nonholonomic dynamic properties. Taking practical constraints into consideration, we propose a novel approach to distributed flocking control of nonholonomic mobile robots by bounded feedback. The flocking control objectives consist of velocity consensus, collision avoidance, and cohesion maintenance among mobile robots. A flocking control protocol which is based on the information of neighbor mobile robots is constructed. The theoretical analysis is conducted with the help of a Lyapunov-like function and graph theory. Simulation results are shown to demonstrate the efficacy of the proposed distributed flocking control scheme.