 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Verification for Evasive Collision Avoidance in Autonomous Vehicles with Enhanced Resolutions
Nov 05, 2024This paper presents a comprehensive hazard analysis, risk assessment, and loss evaluation for an Evasive Minimum Risk Maneuvering (EMRM) system designed for autonomous vehicles. The EMRM system is engineered to enhance collision avoidance and mitigate loss severity by drawing inspiration from professional drivers who perform aggressive maneuvers while maintaining stability for effective risk mitigation. Recent advancements in autonomous vehicle technology demonstrate a growing capability for high-performance maneuvers. This paper discusses a comprehensive safety verification process and establishes a clear safety goal to enhance testing validation. The study systematically identifies potential hazards and assesses their risks to overall safety and the protection of vulnerable road users. A novel loss evaluation approach is introduced, focusing on the impact of mitigation maneuvers on loss severity. Additionally, the proposed mitigation integrity level can be used to verify the minimum-risk maneuver feature. This paper applies a verification method to evasive maneuvering, contributing to the development of more reliable active safety features in autonomous driving systems.
Cable Estimation-Based Control for Wire-Borne Underactuated Brachiating Robots: A Combined Direct-Indirect Adaptive Robust Approach
Aug 11, 2020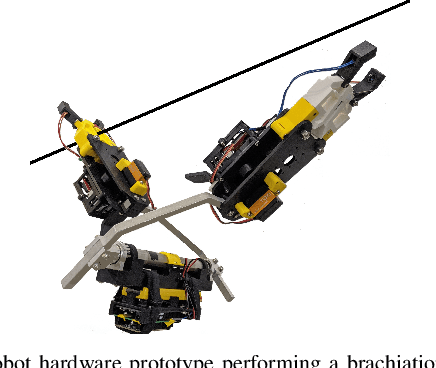
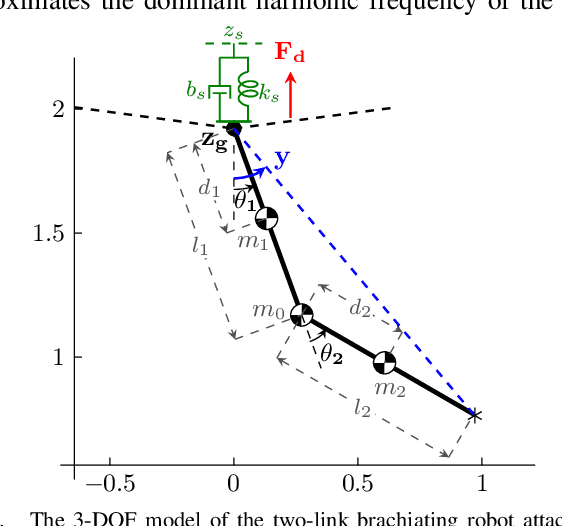
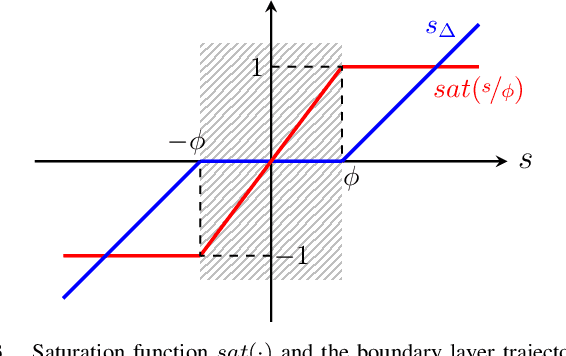
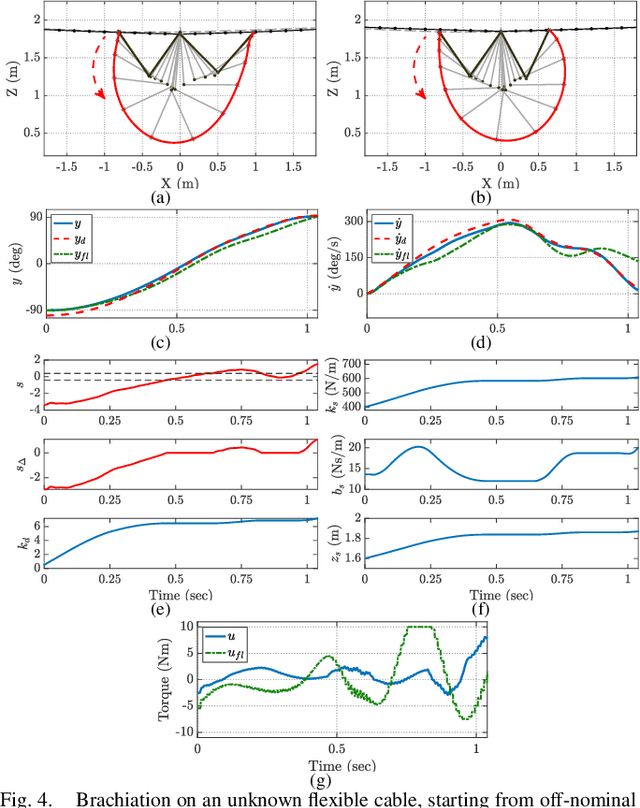
In this paper, we present an online adaptive robust control framework for underactuated brachiating robots traversing flexible cables. Since the dynamic model of a flexible body is unknown in practice, we propose an indirect adaptive estimation scheme to approximate the unknown dynamic effects of the flexible cable as an external force with parametric uncertainties. A boundary layer-based sliding mode control is then designed to compensate for the residual unmodeled dynamics and time-varying disturbances, in which the control gain is updated by an auxiliary direct adaptive control mechanism. Stability analysis and derivation of adaptation laws are carried out through a Lyapunov approach, which formally guarantees the stability and tracking performance of the robot-cable system. Simulation experiments and comparison with a baseline controller show that the combined direct-indirect adaptive robust control framework achieves reliable tracking performance and adaptive system identification, enabling the robot to traverse flexible cables in the presence of unmodeled dynamics, parametric uncertainties and unstructured disturbances.
Bounded Distributed Flocking Control of Nonholonomic Mobile Robots
May 11, 2017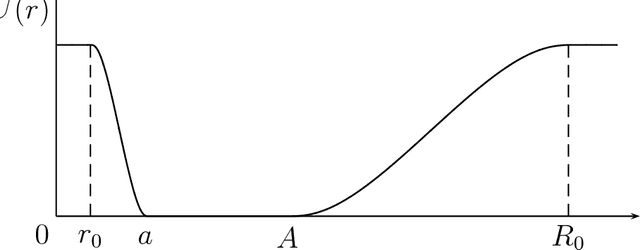
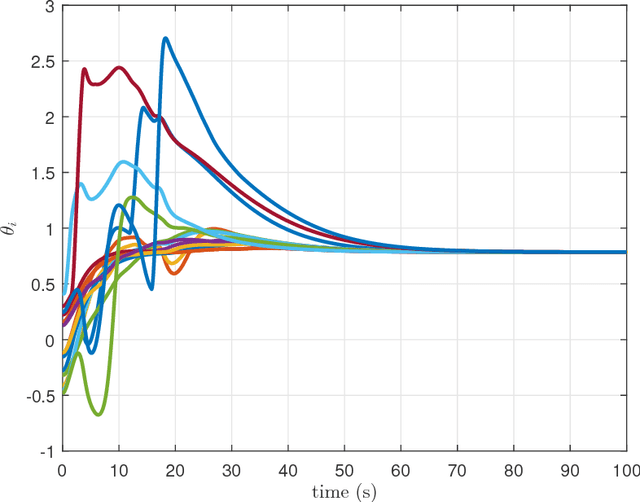
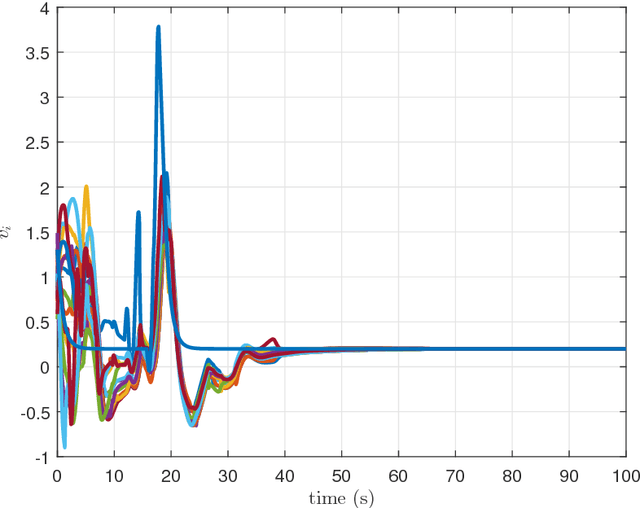
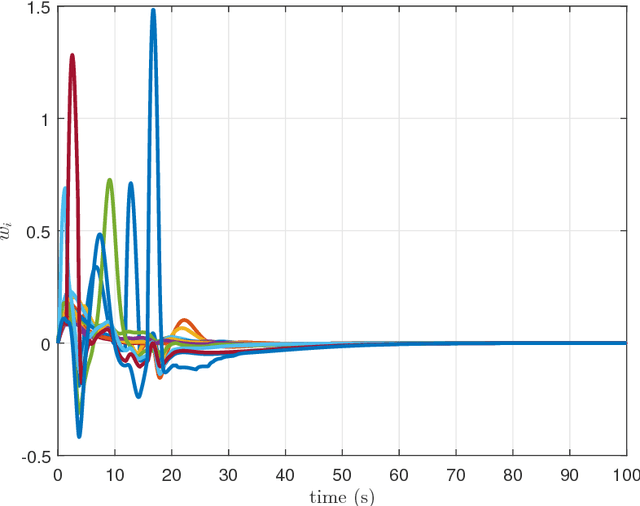
There have been numerous studies on the problem of flocking control for multiagent systems whose simplified models are presented in terms of point-mass elements. Meanwhile, full dynamic models pose some challenging problems in addressing the flocking control problem of mobile robots due to their nonholonomic dynamic properties. Taking practical constraints into consideration, we propose a novel approach to distributed flocking control of nonholonomic mobile robots by bounded feedback. The flocking control objectives consist of velocity consensus, collision avoidance, and cohesion maintenance among mobile robots. A flocking control protocol which is based on the information of neighbor mobile robots is constructed. The theoretical analysis is conducted with the help of a Lyapunov-like function and graph theory. Simulation results are shown to demonstrate the efficacy of the proposed distributed flocking control scheme.