 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling, and Redundancy Resolution of Soft Robot for Effective Harvesting
Mar 15, 2023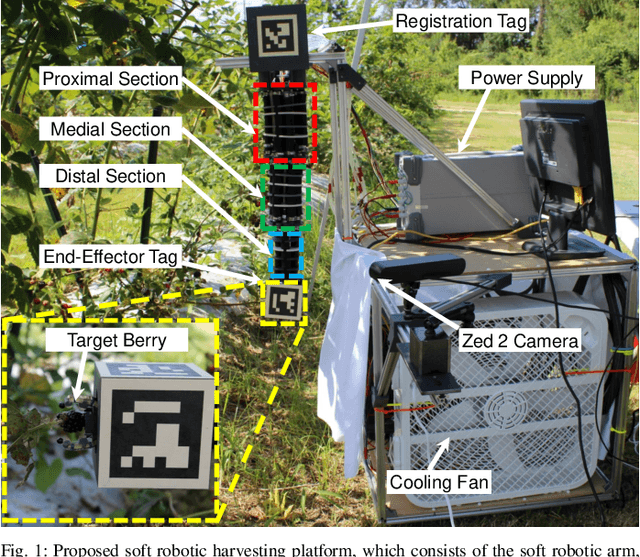
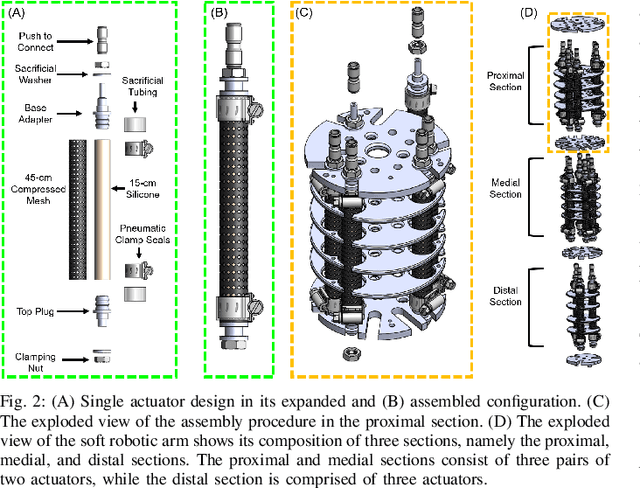
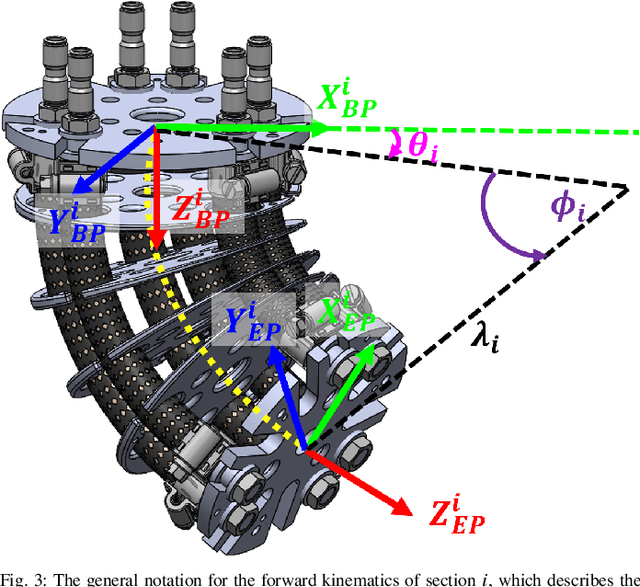
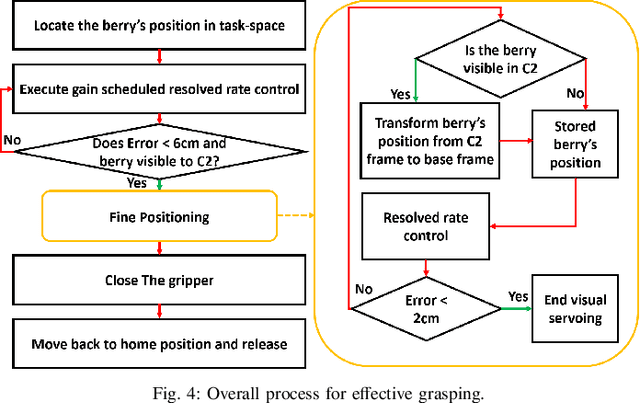
Blackberry harvesting is a labor-intensive and costly process, consuming up to 50\% of the total annual crop hours. This paper presents a solution for robotic harvesting through the design, manufacturing, integration, and control of a pneumatically actuated, kinematically redundant soft arm with a tendon-driven soft robotic gripper. The hardware design is optimized for durability and modularity for practical use. The harvesting process is divided into four stages: initial placement, fine positioning, grasp, and move back to home position. For initial placement, we propose a real-time, continuous gain-scheduled redundancy resolution algorithm for simultaneous position and orientation control with joint-limit avoidance. The algorithm relies solely on visual feedback from an eye-to-hand camera and achieved a position and orientation tracking error of $0.64\pm{0.27}$ mm and $1.08\pm{1.5}^{\circ}$, respectively, in benchtop settings. Following accurate initial placement of the robotic arm, fine positioning is achieved using a combination of eye-in-hand and eye-to-hand visual feedback, reaching an accuracy of $0.75\pm{0.36}$ mm. The system's hardware, feedback framework, and control methods are thoroughly validated through benchtop and field tests, confirming feasibility for practical applications.
Tendon-Driven Soft Robotic Gripper with Integrated Ripeness Sensing for Blackberry Harvesting
Feb 06, 2023Growing global demand for food, coupled with continuing labor shortages, motivates the need for automated agricultural harvesting. While some specialty crops (e.g., apples, peaches, blueberries) can be harvested via existing harvesting modalities, fruits such as blackberries and raspberries require delicate handling to mitigate fruit damage that could significantly impact marketability. This motivates the development of soft robotic solutions that enable efficient, delicate harvesting. This paper presents the design, fabrication, and feasibility testing of a tendon-driven soft gripping system focused on blackberries, which are a fragile fruit susceptible to post-harvest damage. The gripper is both low-cost and small form factor, allowing for the integration of a micro-servo for tendon retraction, a near-infrared (NIR) based blackberry ripeness sensor utilizing the reflectance modality for identifying fully ripe blackberries, and an endoscopic camera for visual servoing with a UR-5. The gripper was used to harvest 139 berries with manual positioning in two separate field tests. Field testing found an average retention force of 2.06 N and 6.08 N for ripe and unripe blackberries, respectively. Sensor tests identified an average reflectance of 16.78 and 21.70 for ripe and unripe blackberries, respectively, indicating a clear distinction between the two ripeness levels. Finally, the soft robotic gripper was integrated onto a UR5 robot arm and successfully harvested fifteen artificial blackberries in a lab setting using visual servoing.
Cable Estimation-Based Control for Wire-Borne Underactuated Brachiating Robots: A Combined Direct-Indirect Adaptive Robust Approach
Aug 11, 2020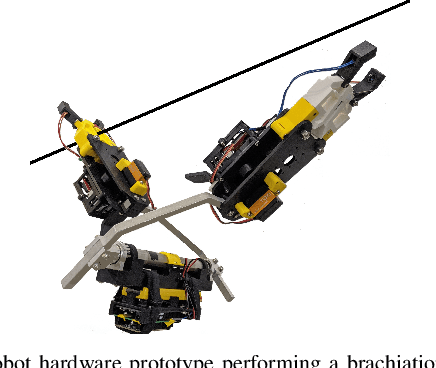
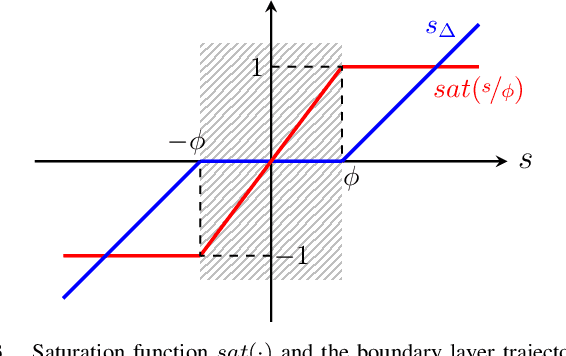
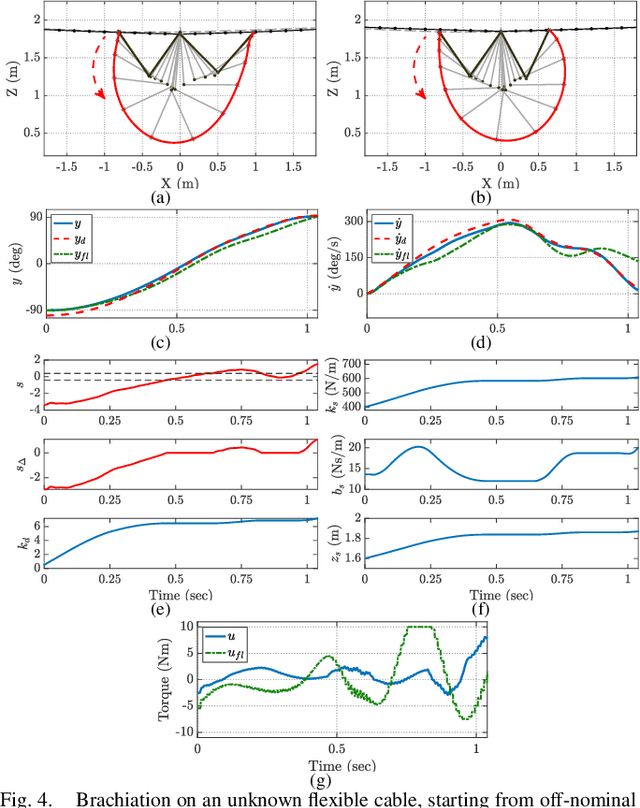
In this paper, we present an online adaptive robust control framework for underactuated brachiating robots traversing flexible cables. Since the dynamic model of a flexible body is unknown in practice, we propose an indirect adaptive estimation scheme to approximate the unknown dynamic effects of the flexible cable as an external force with parametric uncertainties. A boundary layer-based sliding mode control is then designed to compensate for the residual unmodeled dynamics and time-varying disturbances, in which the control gain is updated by an auxiliary direct adaptive control mechanism. Stability analysis and derivation of adaptation laws are carried out through a Lyapunov approach, which formally guarantees the stability and tracking performance of the robot-cable system. Simulation experiments and comparison with a baseline controller show that the combined direct-indirect adaptive robust control framework achieves reliable tracking performance and adaptive system identification, enabling the robot to traverse flexible cables in the presence of unmodeled dynamics, parametric uncertainties and unstructured disturbances.
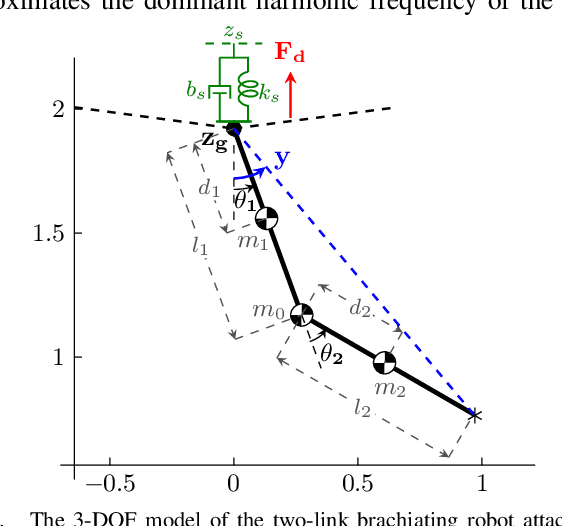
Robust Control Synthesis and Verification for Wire-Borne Underactuated Brachiating Robots Using Sum-of-Squares Optimization
Jul 23, 2020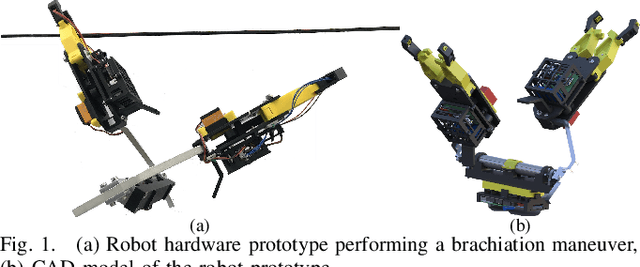
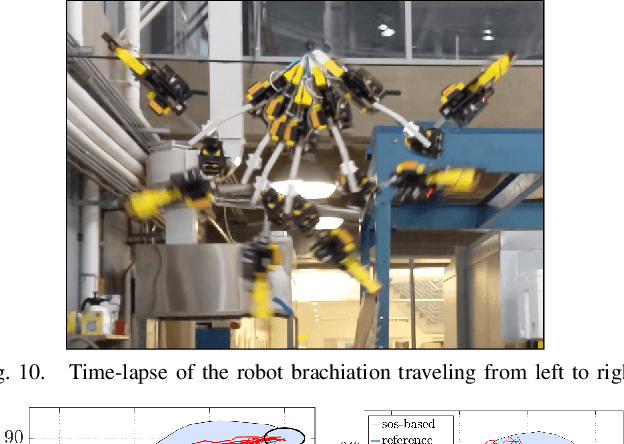
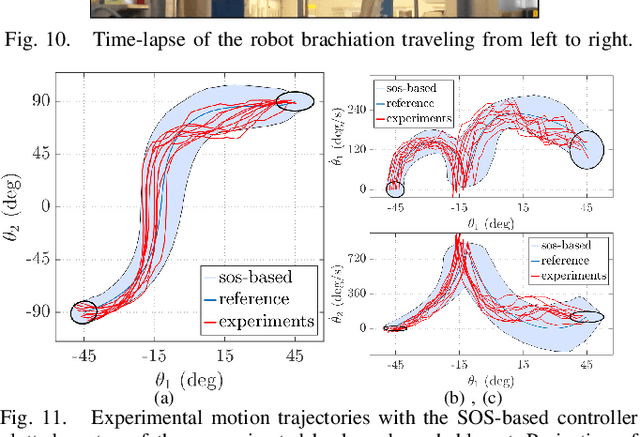
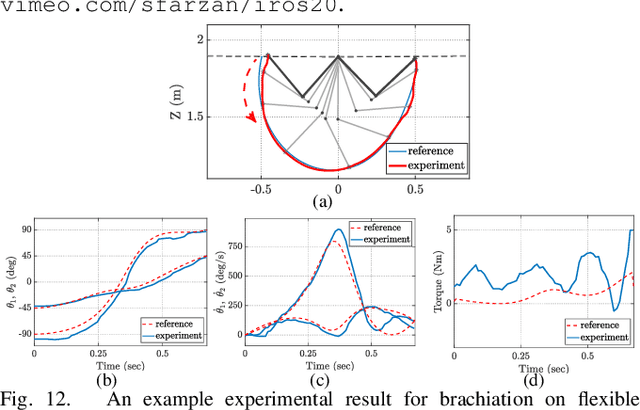
Control of wire-borne underactuated brachiating robots requires a robust feedback control design that can deal with dynamic uncertainties, actuator constraints and unmeasurable states. In this paper, we develop a robust feedback control for brachiating on flexible cables, building on previous work on optimal trajectory generation and time-varying LQR controller design. We propose a novel simplified model for approximation of the flexible cable dynamics, which enables inclusion of parametric model uncertainties in the system. We then use semidefinite programming (SDP) and sum-of-squares (SOS) optimization to synthesize a time-varying feedback control with formal robustness guarantees to account for model uncertainties and unmeasurable states in the system. Through simulation, hardware experiments and comparison with a time-varying LQR controller, it is shown that the proposed robust controller results in relatively large robust backward reachable sets and is able to reliably track a pre-generated optimal trajectory and achieve the desired brachiating motion in the presence of parametric model uncertainties, actuator limits, and unobservable states.
Resolution-Enhanced MRI-Guided Navigation of Spinal Cellular Injection Robot
Jun 09, 2020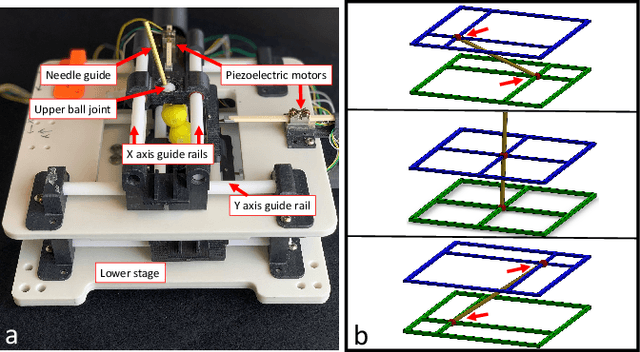
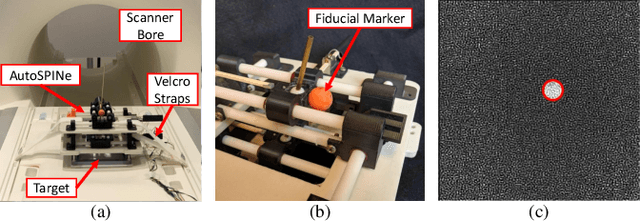

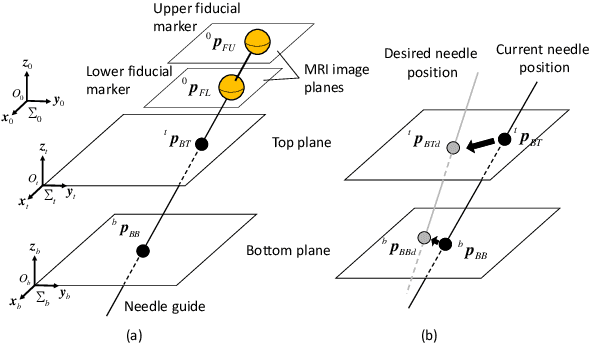
This paper presents a method of navigating a surgical robot beyond the resolution of magnetic resonance imaging (MRI) by using a resolution enhancement technique enabled by high-precision piezoelectric actuation. The surgical robot was specifically designed for injecting stem cells into the spinal cord. This particular therapy can be performed in a shorter time by using a MRI-compatible robotic platform than by using a manual needle positioning platform. Imaging resolution of fiducial markers attached to the needle guide tubing was enhanced by reconstructing a high-resolution image from multiple images with sub-pixel movements of the robot. The parallel-plane direct-drive needle positioning mechanism positioned the needle guide with a high spatial precision that is two orders of magnitude higher than typical MRI resolution up to 1 mm. Reconstructed resolution enhanced images were used to navigate the robot precisely that would not have been possible by using standard MRI. Experiments were conducted to verify the effectiveness of the proposed enhanced-resolution image-guided intervention.