 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBody-mounted MR-conditional Robot for Minimally Invasive Liver Intervention
Oct 11, 2023MR-guided microwave ablation (MWA) has proven effective in treating hepatocellular carcinoma (HCC) with small-sized tumors, but the state-of-the-art technique suffers from sub-optimal workflow due to speed and accuracy of needle placement. This paper presents a compact body-mounted MR-conditional robot that can operate in closed-bore MR scanners for accurate needle guidance. The robotic platform consists of two stacked Cartesian XY stages, each with two degrees of freedom, that facilitate needle guidance. The robot is actuated using 3D-printed pneumatic turbines with MR-conditional bevel gear transmission systems. Pneumatic valves and control mechatronics are located inside the MRI control room and are connected to the robot with pneumatic transmission lines and optical fibers. Free space experiments indicated robot-assisted needle insertion error of 2.6$\pm$1.3 mm at an insertion depth of 80 mm. The MR-guided phantom studies were conducted to verify the MR-conditionality and targeting performance of the robot. Future work will focus on the system optimization and validations in animal trials.
Design, Modeling, and Redundancy Resolution of Soft Robot for Effective Harvesting
Mar 15, 2023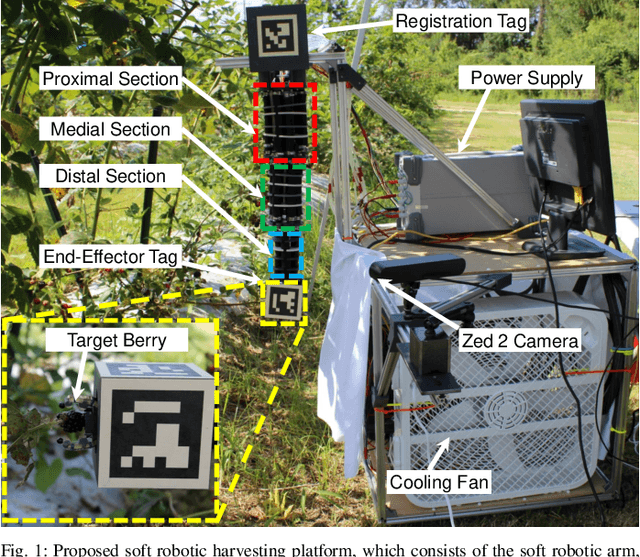
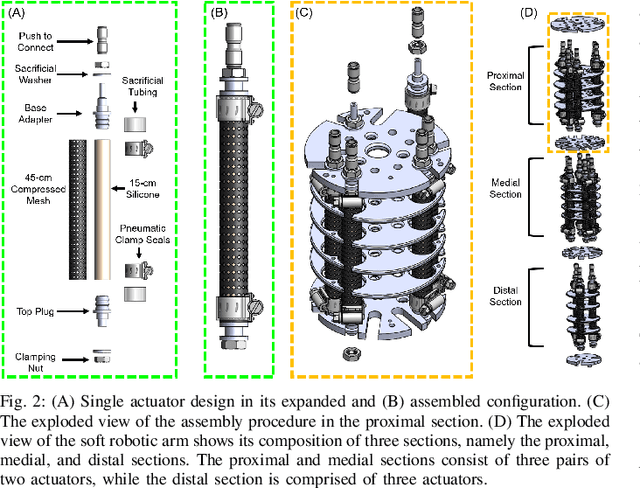
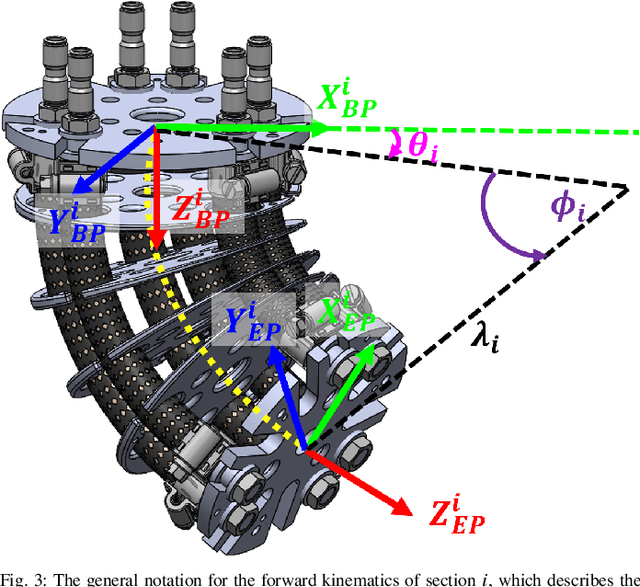
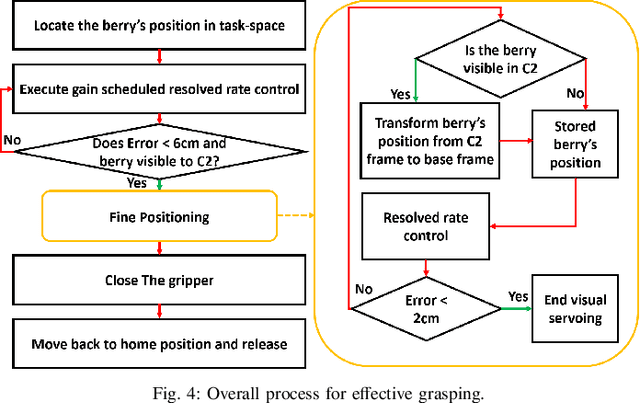
Blackberry harvesting is a labor-intensive and costly process, consuming up to 50\% of the total annual crop hours. This paper presents a solution for robotic harvesting through the design, manufacturing, integration, and control of a pneumatically actuated, kinematically redundant soft arm with a tendon-driven soft robotic gripper. The hardware design is optimized for durability and modularity for practical use. The harvesting process is divided into four stages: initial placement, fine positioning, grasp, and move back to home position. For initial placement, we propose a real-time, continuous gain-scheduled redundancy resolution algorithm for simultaneous position and orientation control with joint-limit avoidance. The algorithm relies solely on visual feedback from an eye-to-hand camera and achieved a position and orientation tracking error of $0.64\pm{0.27}$ mm and $1.08\pm{1.5}^{\circ}$, respectively, in benchtop settings. Following accurate initial placement of the robotic arm, fine positioning is achieved using a combination of eye-in-hand and eye-to-hand visual feedback, reaching an accuracy of $0.75\pm{0.36}$ mm. The system's hardware, feedback framework, and control methods are thoroughly validated through benchtop and field tests, confirming feasibility for practical applications.
Dynamic Control of Soft Robotic Arm: An Experimental Study
Sep 22, 2022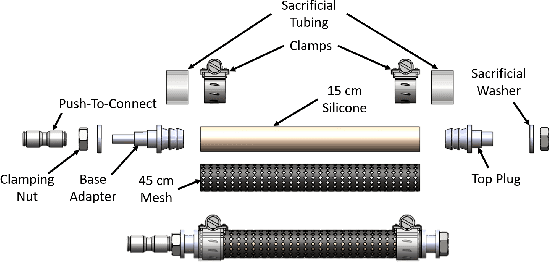
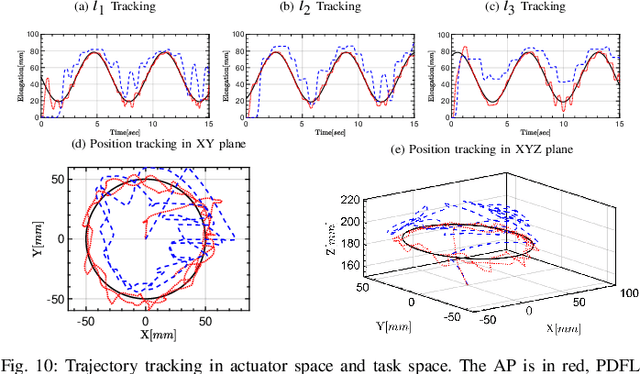
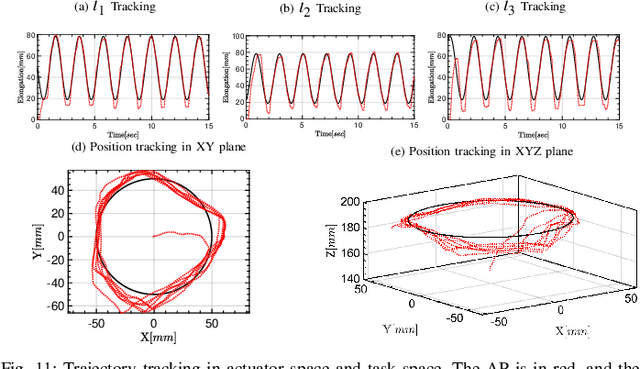
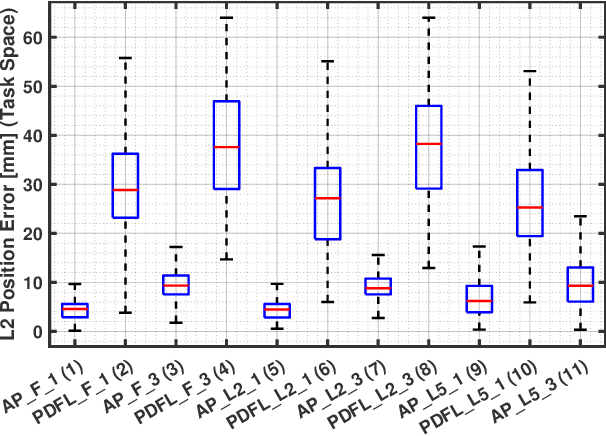
In this paper, a reinforced soft robot prototype with a custom-designed actuator-space string encoder are created to investigate dynamic soft robotic trajectory tracking. The soft robot prototype embedded with the proposed adaptive passivity control and efficient dynamic model make the challenging trajectory tracking tasks possible. We focus on the exploration of tracking accuracy as well as the full potential of the proposed control strategy by performing experimental validations at different operation scenarios: various tracking speed and external disturbance. In all experimental scenarios, the proposed adaptive passivity control outperforms the conventional PD feedback linearization control. The experimental analysis details the advantage and shortcoming of the proposed approach, and points out the next steps for future soft robot dynamic control.
A Surgical Platform for Intracerebral Hemorrhage Robotic Evacuation (ASPIHRE): A Non-metallic MR-guided Concentric Tube Robot
Jun 20, 2022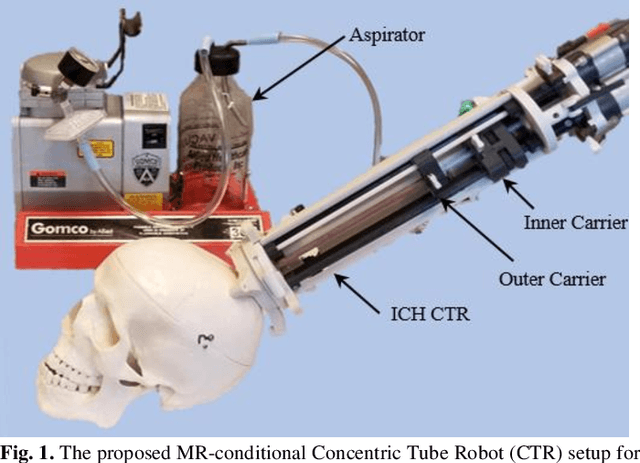
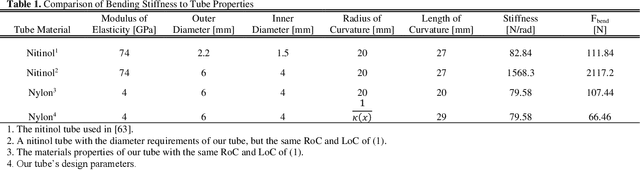
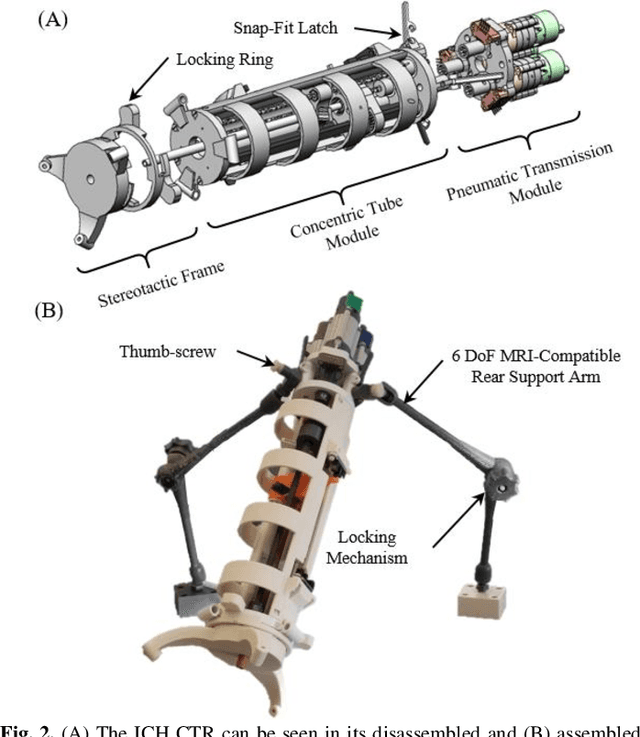
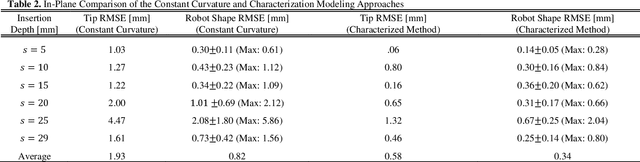
Intracerebral hemorrhage (ICH) is the deadliest stroke sub-type, with a one-month mortality rate as high as 52%. Due to the potential cortical disruption caused by craniotomy, conservative management (watchful waiting) has historically been a common method of treatment. Minimally invasive evacuation has recently become an accepted method of treatment for patients with deep-seated hematoma 30-50 mL in volume, but proper visualization and tool dexterity remain constrained in conventional endoscopic approaches, particularly with larger hematoma volumes (> 50 mL). In this article we describe the development of ASPIHRE (A Surgical Platform for Intracerebral Hemorrhage Robotic Evacuation), the first-ever concentric tube robot that uses off-the-shelf plastic tubes for MR-guided ICH evacuation, improving tool dexterity and procedural visualization. The robot kinematics model is developed based on a calibration-based method and tube mechanics modeling, allowing the models to consider both variable curvature and torsional deflection. The MR-safe pneumatic motors are controlled using a variable gain PID algorithm producing a rotational accuracy of 0.317 +/- 0.3 degrees. The hardware and theoretical models are validated in a series of systematic bench-top and MRI experiments resulting in positional accuracy of the tube tip of 1.39 +\- 0.54 mm. Following validation of targeting accuracy, the evacuation efficacy of the robot was tested in an MR-guided phantom clot evacuation experiment. The robot was able to evacuate an initially 38.36 mL clot in 5 minutes, leaving a residual hematoma of 8.14 mL, well below the 15 mL guideline suggesting good post-ICH evacuation clinical outcomes.
Tendon-Driven Soft Robotic Gripper for Berry Harvesting
Mar 07, 2021
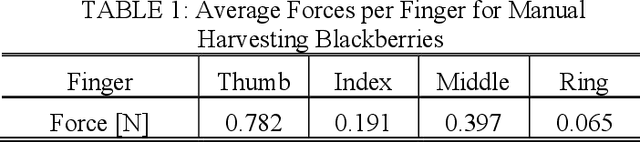
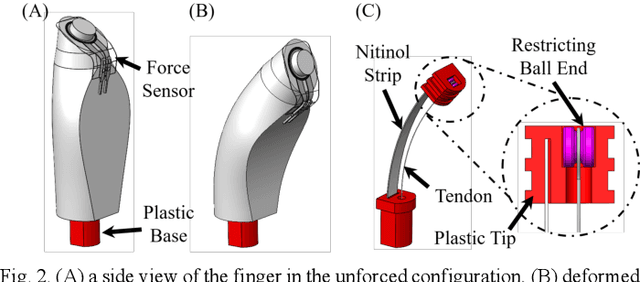
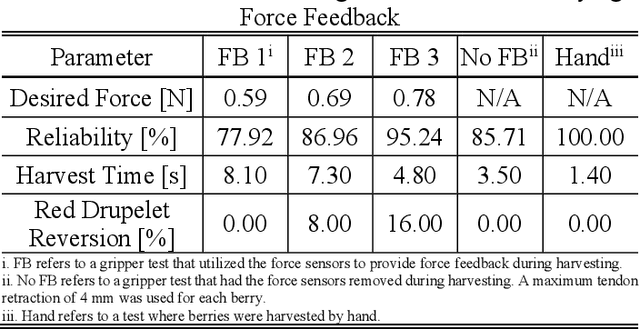
Global berry production and consumption have significantly increased in recent years, coinciding with increased consumer awareness of the health-promoting benefits of berries. Among them, fresh market blackberries and raspberries are primarily harvested by hand to maintain post-harvest quality. However, fresh market berry harvesting is an arduous, costly endeavor that accounts for up to 50% of the worker hours. Additionally, the inconsistent forces applied during hand-harvesting can result in an 85% loss of marketable berries due to red drupelet reversion (RDR). Herein, we present a novel, tendon-driven soft robotic gripper with active contact force feedback control, which leverages the passive compliance of the gripper for the gentle harvesting of blackberries. The versatile gripper was able to apply a desired force as low as 0.5 N with a mean error of 0.046 N, while also holding payloads that produce forces as high as 18 N. Field test results indicate that the gripper is capable of harvesting berries with minimal berry damage, while maintaining a harvesting reliability of 95% and a harvesting rate of approximately 4.8 seconds per berry.