 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Surgical Platform for Intracerebral Hemorrhage Robotic Evacuation (ASPIHRE): A Non-metallic MR-guided Concentric Tube Robot
Jun 20, 2022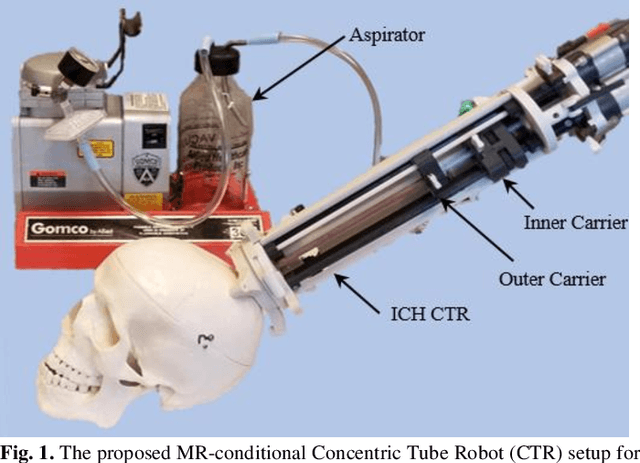
Intracerebral hemorrhage (ICH) is the deadliest stroke sub-type, with a one-month mortality rate as high as 52%. Due to the potential cortical disruption caused by craniotomy, conservative management (watchful waiting) has historically been a common method of treatment. Minimally invasive evacuation has recently become an accepted method of treatment for patients with deep-seated hematoma 30-50 mL in volume, but proper visualization and tool dexterity remain constrained in conventional endoscopic approaches, particularly with larger hematoma volumes (> 50 mL). In this article we describe the development of ASPIHRE (A Surgical Platform for Intracerebral Hemorrhage Robotic Evacuation), the first-ever concentric tube robot that uses off-the-shelf plastic tubes for MR-guided ICH evacuation, improving tool dexterity and procedural visualization. The robot kinematics model is developed based on a calibration-based method and tube mechanics modeling, allowing the models to consider both variable curvature and torsional deflection. The MR-safe pneumatic motors are controlled using a variable gain PID algorithm producing a rotational accuracy of 0.317 +/- 0.3 degrees. The hardware and theoretical models are validated in a series of systematic bench-top and MRI experiments resulting in positional accuracy of the tube tip of 1.39 +\- 0.54 mm. Following validation of targeting accuracy, the evacuation efficacy of the robot was tested in an MR-guided phantom clot evacuation experiment. The robot was able to evacuate an initially 38.36 mL clot in 5 minutes, leaving a residual hematoma of 8.14 mL, well below the 15 mL guideline suggesting good post-ICH evacuation clinical outcomes.
Modal-based Kinematics and Contact Detection of Soft Robots
Jun 27, 2019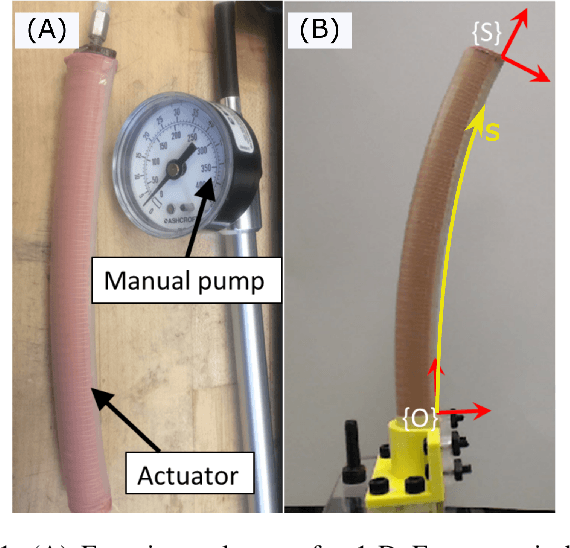

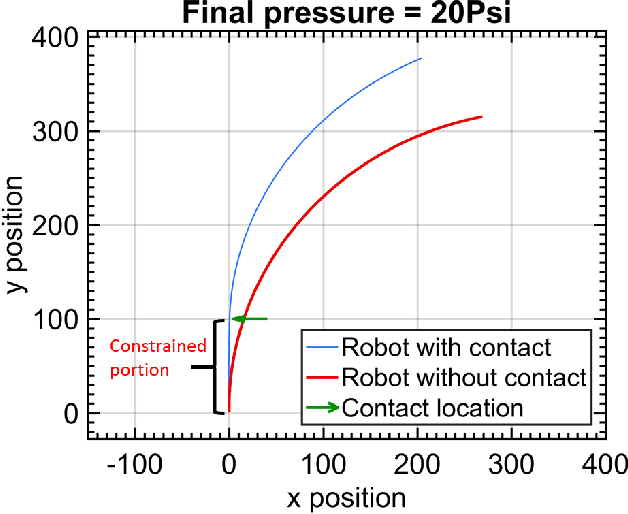

Soft robots offer an alternative approach to manipulate inside the constrained space while maintaining the safe interaction with the external environment. Due to its adaptable compliance characteristic, external contact force can easily deform the robot shapes and lead to undesired robot kinematic and dynamic properties. Accurate contact detection and contact position estimation are of critical importance for soft robot modeling, control, trajectory planning, and eventually affect the success of task completion. In this paper, we focus on the study of 1-DoF soft pneumatic bellow bending actuator, which is one of the fundamental components to construct complex, multi-DoF soft robots. This 1-DoF soft robot is modeled through the integral representation of the spacial curve. The direct and instantaneous kinematics are calculated explicitly through a modal method. The fixed centrode deviation (FCD) method is used to to detect the external contact and estimate contact location. Simulation results indicate that the contact location can be accurately estimated by solving a nonlinear least square optimization problem.