 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFluoroscopic Shape and Pose Tracking of Catheters with Custom Radiopaque Markers
Jun 11, 2025


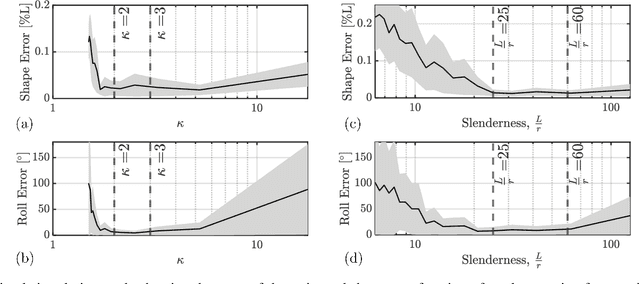
Safe navigation of steerable and robotic catheters in the cerebral vasculature requires awareness of the catheters shape and pose. Currently, a significant perception burden is placed on interventionalists to mentally reconstruct and predict catheter motions from biplane fluoroscopy images. Efforts to track these catheters are limited to planar segmentation or bulky sensing instrumentation, which are incompatible with microcatheters used in neurointervention. In this work, a catheter is equipped with custom radiopaque markers arranged to enable simultaneous shape and pose estimation under biplane fluoroscopy. A design measure is proposed to guide the arrangement of these markers to minimize sensitivity to marker tracking uncertainty. This approach was deployed for microcatheters smaller than 2mm OD navigating phantom vasculature with shape tracking errors less than 1mm and catheter roll errors below 40 degrees. This work can enable steerable catheters to autonomously navigate under biplane imaging.
Neural-Augmented Kelvinlet: Real-Time Soft Tissue Deformation with Multiple Graspers
Jun 06, 2025Fast and accurate simulation of soft tissue deformation is a critical factor for surgical robotics and medical training. In this paper, we introduce a novel physics-informed neural simulator that approximates soft tissue deformations in a realistic and real-time manner. Our framework integrates Kelvinlet-based priors into neural simulators, making it the first approach to leverage Kelvinlets for residual learning and regularization in data-driven soft tissue modeling. By incorporating large-scale Finite Element Method (FEM) simulations of both linear and nonlinear soft tissue responses, our method improves neural network predictions across diverse architectures, enhancing accuracy and physical consistency while maintaining low latency for real-time performance. We demonstrate the effectiveness of our approach by performing accurate surgical maneuvers that simulate the use of standard laparoscopic tissue grasping tools with high fidelity. These results establish Kelvinlet-augmented learning as a powerful and efficient strategy for real-time, physics-aware soft tissue simulation in surgical applications.
A Modal-Space Formulation for Momentum Observer Contact Estimation and Effects of Uncertainty for Continuum Robots
May 05, 2025



Contact detection for continuum and soft robots has been limited in past works to statics or kinematics-based methods with assumed circular bending curvature or known bending profiles. In this paper, we adapt the generalized momentum observer contact estimation method to continuum robots. This is made possible by leveraging recent results for real-time shape sensing of continuum robots along with a modal-space representation of the robot dynamics. In addition to presenting an approach for estimating the generalized forces due to contact via a momentum observer, we present a constrained optimization method to identify the wrench imparted on the robot during contact. We also present an approach for investigating the effects of unmodeled deviations in the robot's dynamic state on the contact detection method and we validate our algorithm by simulations and experiments. We also compare the performance of the momentum observer to the joint force deviation method, a direct estimation approach using the robot's full dynamic model. We also demonstrate a basic extension of the method to multisegment continuum robots. Results presented in this work extend dynamic contact detection to the domain of continuum and soft robots and can be used to improve the safety of large-scale continuum robots for human-robot collaboration.
Multi-Modal Gesture Recognition from Video and Surgical Tool Pose Information via Motion Invariants
Mar 19, 2025Recognizing surgical gestures in real-time is a stepping stone towards automated activity recognition, skill assessment, intra-operative assistance, and eventually surgical automation. The current robotic surgical systems provide us with rich multi-modal data such as video and kinematics. While some recent works in multi-modal neural networks learn the relationships between vision and kinematics data, current approaches treat kinematics information as independent signals, with no underlying relation between tool-tip poses. However, instrument poses are geometrically related, and the underlying geometry can aid neural networks in learning gesture representation. Therefore, we propose combining motion invariant measures (curvature and torsion) with vision and kinematics data using a relational graph network to capture the underlying relations between different data streams. We show that gesture recognition improves when combining invariant signals with tool position, achieving 90.3\% frame-wise accuracy on the JIGSAWS suturing dataset. Our results show that motion invariant signals coupled with position are better representations of gesture motion compared to traditional position and quaternion representations. Our results highlight the need for geometric-aware modeling of kinematics for gesture recognition.
Sensorless Remote Center of Motion Misalignment Estimation
Mar 17, 2025

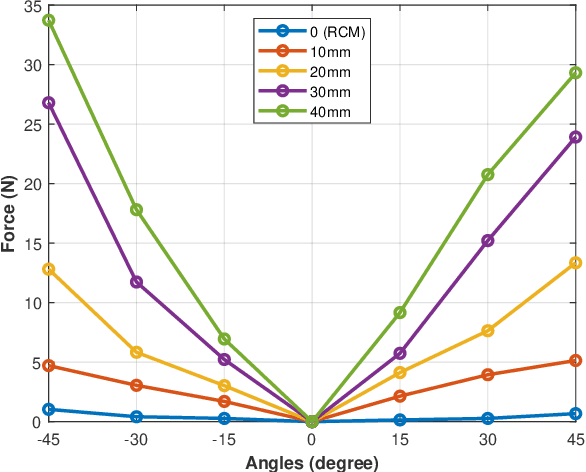

Laparoscopic surgery constrains instrument motion around a fixed pivot point at the incision into a patient to minimize tissue trauma. Surgical robots achieve this through either hardware to software-based remote center of motion (RCM) constraints. However, accurate RCM alignment is difficult due to manual trocar placement, patient motion, and tissue deformation. Misalignment between the robot's RCM point and the patient incision site can cause unsafe forces at the incision site. This paper presents a sensorless force estimation-based framework for dynamically assessing and optimizing RCM misalignment in robotic surgery. Our experiments demonstrate that misalignment exceeding 20 mm can generate large enough forces to potentially damage tissue, emphasizing the need for precise RCM positioning. For misalignment $D\geq $ 20 mm, our optimization algorithm estimates the RCM offset with an absolute error within 5 mm. Accurate RCM misalignment estimation is a step toward automated RCM misalignment compensation, enhancing safety and reducing tissue damage in robotic-assisted laparoscopic surgery.
A Feasibility Study of a Soft, Low-Cost, 6-Axis Load Cell for Haptics
Oct 04, 2024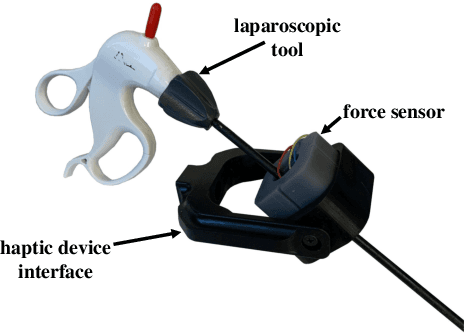
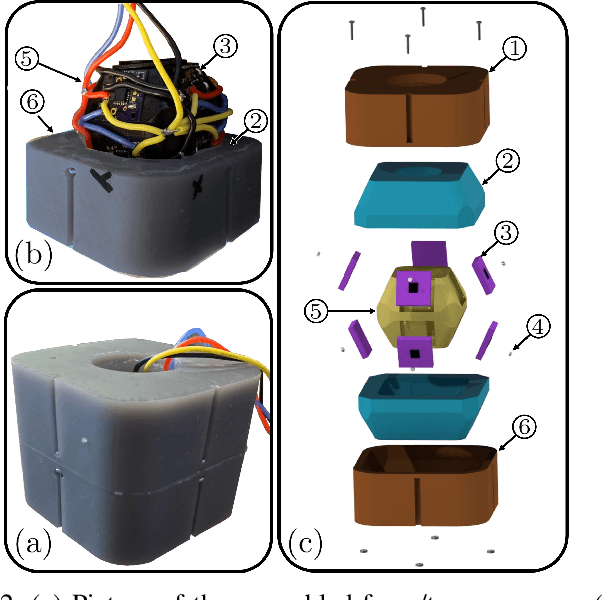


Haptic devices have shown to be valuable in supplementing surgical training, especially when providing haptic feedback based on user performance metrics such as wrench applied by the user on the tool. However, current 6-axis force/torque sensors are prohibitively expensive. This paper presents the design and calibration of a low-cost, six-axis force/torque sensor specially designed for laparoscopic haptic training applications. The proposed design uses Hall-effect sensors to measure the change in the position of magnets embedded in a silicone layer that results from an applied wrench to the device. Preliminary experimental validation demonstrates that these sensors can achieve an accuracy of 0.45 N and 0.014 Nm, and a theoretical XY range of +/-50N, Z range of +/-20N, and torque range of +/-0.2Nm. This study indicates that the proposed low-cost 6-axis force/torque sensor can accurately measure user force and provide useful feedback during laparoscopic training on a haptic device.
Endovascular Detection of Catheter-Thrombus Contact by Vacuum Excitation
Jan 19, 2024Objective: The objective of this work is to introduce and demonstrate the effectiveness of a novel sensing modality for contact detection between an off-the-shelf aspiration catheter and a thrombus. Methods: A custom robotic actuator with a pressure sensor was used to generate an oscillatory vacuum excitation and sense the pressure inside the extracorporeal portion of the catheter. Vacuum pressure profiles and robotic motion data were used to train a support vector machine (SVM) classification model to detect contact between the aspiration catheter tip and a mock thrombus. Validation consisted of benchtop accuracy verification, as well as user study comparison to the current standard of angiographic presentation. Results: Benchtop accuracy of the sensing modality was shown to be 99.67%. The user study demonstrated statistically significant improvement in identifying catheter-thrombus contact compared to the current standard. The odds ratio of successful detection of clot contact was 2.86 (p=0.03) when using the proposed sensory method compared to without it. Conclusion: The results of this work indicate that the proposed sensing modality can offer intraoperative feedback to interventionalists that can improve their ability to detect contact between the distal tip of a catheter and a thrombus. Significance: By offering a relatively low-cost technology that affords off-the-shelf aspiration catheters as clot-detecting sensors, interventionalists can improve the first-pass effect of the mechanical thrombectomy procedure while reducing procedural times and mental burden.
Design Considerations and Robustness to Parameter Uncertainty in Wire-Wrapped Cam Mechanisms
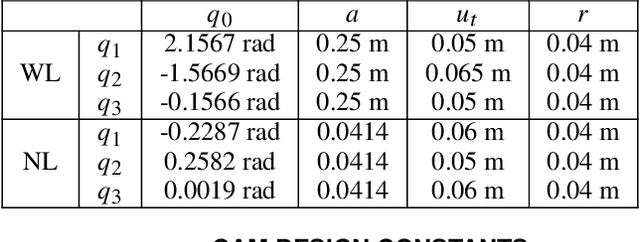
Jun 22, 2023Collaborative robots must simultaneously be safe enough to operate in close proximity to human operators and powerful enough to assist users in industrial tasks such as lifting heavy equipment. The requirement for safety necessitates that collaborative robots are designed with low-powered actuators. However, some industrial tasks may require the robot to have high payload capacity and/or long reach. For collaborative robot designs to be successful, they must find ways of addressing these conflicting design requirements. One promising strategy for navigating this tradeoff is through the use of static balancing mechanisms to offset the robot's self weight, thus enabling the selection of lower-powered actuators. In this paper, we introduce a novel, 2 degree of freedom static balancing mechanism based on spring-loaded, wire-wrapped cams. We also present an optimization-based cam design method that guarantees the cams stay convex, ensures the springs stay below their extensions limits, and minimizes sensitivity to unmodeled deviations from the nominal spring constant. Additionally, we present a model of the effect of friction between the wire and the cam. Lastly, we show experimentally that the torque generated by the cam mechanism matches the torque predicted in our modeling approach. Our results also suggest that the effects of wire-cam friction are significant for non-circular cams.
Design Considerations for 3RRR Parallel Robots with Lightweight, Approximate Static-Balancing
Jun 22, 2023


Balancing parallel robots throughout their workspace while avoiding the use of balancing masses and respecting design practicality constraints is difficult. Medical robots demand such compact and lightweight designs. This paper considers the difficult task of achieving optimal approximate balancing of a parallel robot throughout a desired task-based dexterous workspace using balancing springs only. While it is possible to achieve perfect balancing in a path, only approximate balancing may be achieved without the addition of balancing masses. Design considerations for optimal robot base placement and the effects of placement of torsional balancing springs are presented. Using a modal representation for the balancing torque requirements, we use recent results on the design of wire-wrapped cam mechanisms to achieve balancing throughout a task-based workspace. A simulation study shows that robot base placement can have a detrimental effect on the attainability of a practical design solution for static balancing. We also show that optimal balancing using torsional springs is best achieved when all springs are at the actuated joints and that the wire-wrapped cam design can significantly improve the performance of static balancing. The methodology presented in this paper provides practical design solutions that yield simple, lightweight and compact designs suitable for medical applications where such traits are paramount.
Task and Configuration Space Compliance of Continuum Robots via Lie Group and Modal Shape Formulations
Jun 22, 2023Continuum robots suffer large deflections due to internal and external forces. Accurate modeling of their passive compliance is necessary for accurate environmental interaction, especially in scenarios where direct force sensing is not practical. This paper focuses on deriving analytic formulations for the compliance of continuum robots that can be modeled as Kirchhoff rods. Compared to prior works, the approach presented herein is not subject to the constant-curvature assumptions to derive the configuration space compliance, and we do not rely on computationally-expensive finite difference approximations to obtain the task space compliance. Using modal approximations over curvature space and Lie group integration, we obtain closed-form expressions for the task and configuration space compliance matrices of continuum robots, thereby bridging the gap between constant-curvature analytic formulations of configuration space compliance and variable curvature task space compliance. We first present an analytic expression for the compliance of a single Kirchhoff rod. We then extend this formulation for computing both the task space and configuration space compliance of a tendon-actuated continuum robot. We then use our formulation to study the tradeoffs between computation cost and modeling accuracy as well as the loss in accuracy from neglecting the Jacobian derivative term in the compliance model. Finally, we experimentally validate the model on a tendon-actuated continuum segment, demonstrating the model's ability to predict passive deflections with error below 11.5\% percent of total arc length.