 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFluoroscopic Shape and Pose Tracking of Catheters with Custom Radiopaque Markers
Jun 11, 2025


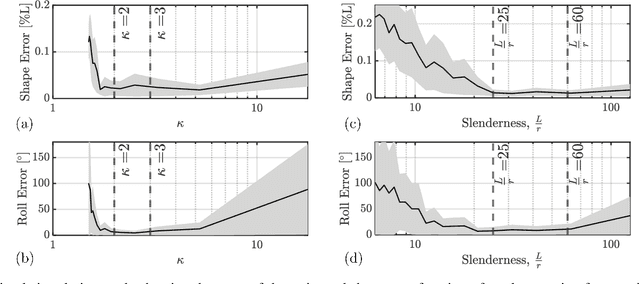
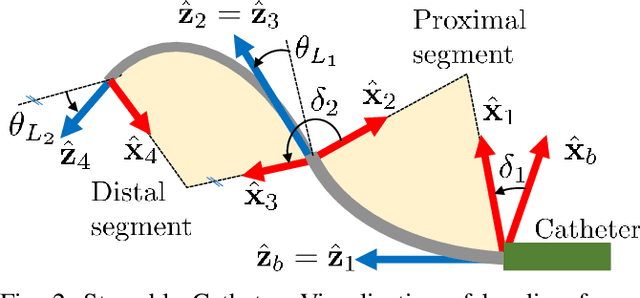
Safe navigation of steerable and robotic catheters in the cerebral vasculature requires awareness of the catheters shape and pose. Currently, a significant perception burden is placed on interventionalists to mentally reconstruct and predict catheter motions from biplane fluoroscopy images. Efforts to track these catheters are limited to planar segmentation or bulky sensing instrumentation, which are incompatible with microcatheters used in neurointervention. In this work, a catheter is equipped with custom radiopaque markers arranged to enable simultaneous shape and pose estimation under biplane fluoroscopy. A design measure is proposed to guide the arrangement of these markers to minimize sensitivity to marker tracking uncertainty. This approach was deployed for microcatheters smaller than 2mm OD navigating phantom vasculature with shape tracking errors less than 1mm and catheter roll errors below 40 degrees. This work can enable steerable catheters to autonomously navigate under biplane imaging.
Endovascular Detection of Catheter-Thrombus Contact by Vacuum Excitation
Jan 19, 2024Objective: The objective of this work is to introduce and demonstrate the effectiveness of a novel sensing modality for contact detection between an off-the-shelf aspiration catheter and a thrombus. Methods: A custom robotic actuator with a pressure sensor was used to generate an oscillatory vacuum excitation and sense the pressure inside the extracorporeal portion of the catheter. Vacuum pressure profiles and robotic motion data were used to train a support vector machine (SVM) classification model to detect contact between the aspiration catheter tip and a mock thrombus. Validation consisted of benchtop accuracy verification, as well as user study comparison to the current standard of angiographic presentation. Results: Benchtop accuracy of the sensing modality was shown to be 99.67%. The user study demonstrated statistically significant improvement in identifying catheter-thrombus contact compared to the current standard. The odds ratio of successful detection of clot contact was 2.86 (p=0.03) when using the proposed sensory method compared to without it. Conclusion: The results of this work indicate that the proposed sensing modality can offer intraoperative feedback to interventionalists that can improve their ability to detect contact between the distal tip of a catheter and a thrombus. Significance: By offering a relatively low-cost technology that affords off-the-shelf aspiration catheters as clot-detecting sensors, interventionalists can improve the first-pass effect of the mechanical thrombectomy procedure while reducing procedural times and mental burden.
Model-Based Pose Estimation of Steerable Catheters under Bi-Plane Image Feedback
Apr 24, 2023


Small catheters undergo significant torsional deflections during endovascular interventions. A key challenge in enabling robot control of these catheters is the estimation of their bending planes. This paper considers approaches for estimating these bending planes based on bi-plane image feedback. The proposed approaches attempt to minimize error between either the direct (position-based) or instantaneous (velocity-based) kinematics with the reconstructed kinematics from bi-plane image feedback. A comparison between these methods is carried out on a setup using two cameras in lieu of a bi-plane fluoroscopy setup. The results show that the position-based approach is less susceptible to segmentation noise and works best when the segment is in a non-straight configuration. These results suggest that estimation of the bending planes can be accompanied with errors under 30 degrees. Considering that the torsional buildup of these catheters can be more than 180 degrees, we believe that this method can be used for catheter control with improved safety due to the reduction of this uncertainty.