 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensorless Remote Center of Motion Misalignment Estimation
Mar 17, 2025

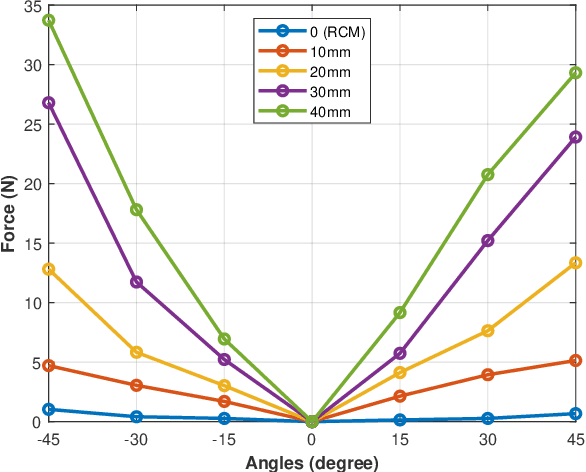

Laparoscopic surgery constrains instrument motion around a fixed pivot point at the incision into a patient to minimize tissue trauma. Surgical robots achieve this through either hardware to software-based remote center of motion (RCM) constraints. However, accurate RCM alignment is difficult due to manual trocar placement, patient motion, and tissue deformation. Misalignment between the robot's RCM point and the patient incision site can cause unsafe forces at the incision site. This paper presents a sensorless force estimation-based framework for dynamically assessing and optimizing RCM misalignment in robotic surgery. Our experiments demonstrate that misalignment exceeding 20 mm can generate large enough forces to potentially damage tissue, emphasizing the need for precise RCM positioning. For misalignment $D\geq $ 20 mm, our optimization algorithm estimates the RCM offset with an absolute error within 5 mm. Accurate RCM misalignment estimation is a step toward automated RCM misalignment compensation, enhancing safety and reducing tissue damage in robotic-assisted laparoscopic surgery.
A Feasibility Study of a Soft, Low-Cost, 6-Axis Load Cell for Haptics
Oct 04, 2024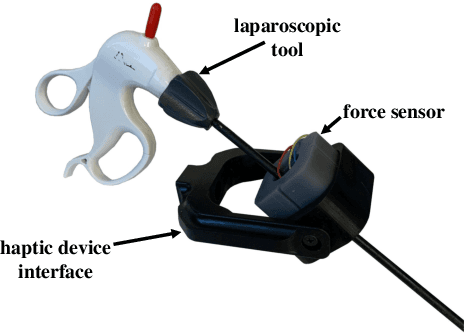
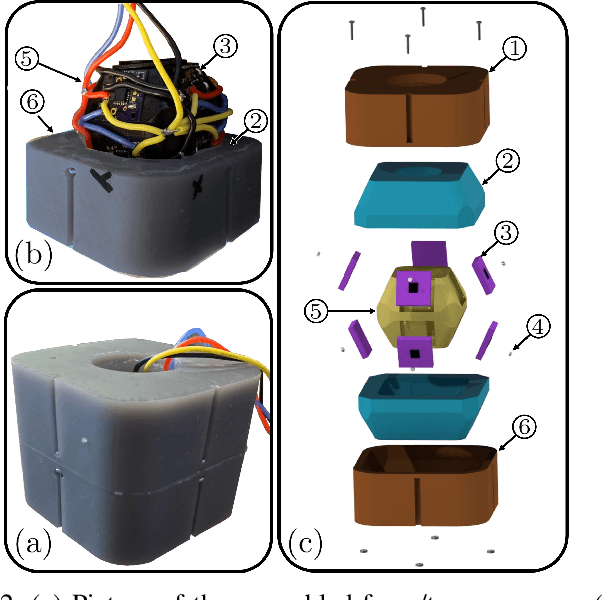


Haptic devices have shown to be valuable in supplementing surgical training, especially when providing haptic feedback based on user performance metrics such as wrench applied by the user on the tool. However, current 6-axis force/torque sensors are prohibitively expensive. This paper presents the design and calibration of a low-cost, six-axis force/torque sensor specially designed for laparoscopic haptic training applications. The proposed design uses Hall-effect sensors to measure the change in the position of magnets embedded in a silicone layer that results from an applied wrench to the device. Preliminary experimental validation demonstrates that these sensors can achieve an accuracy of 0.45 N and 0.014 Nm, and a theoretical XY range of +/-50N, Z range of +/-20N, and torque range of +/-0.2Nm. This study indicates that the proposed low-cost 6-axis force/torque sensor can accurately measure user force and provide useful feedback during laparoscopic training on a haptic device.