 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Complementarity-Based Contact Modeling and Planning for Soft Robots
Feb 24, 2026Soft robots were introduced in large part to enable safe, adaptive interaction with the environment, and this interaction relies fundamentally on contact. However, modeling and planning contact-rich interactions for soft robots remain challenging: dense contact candidates along the body create redundant constraints and rank-deficient LCPs, while the disparity between high stiffness and low friction introduces severe ill-conditioning. Existing approaches rely on problem-specific approximations or penalty-based treatments. This letter presents a unified complementarity-based framework for soft-robot contact modeling and planning that brings contact modeling, manipulation, and planning into a unified, physically consistent formulation. We develop a robust Linear Complementarity Problem (LCP) model tailored to discretized soft robots and address these challenges with a three-stage conditioning pipeline: inertial rank selection to remove redundant contacts, Ruiz equilibration to correct scale disparity and ill-conditioning, and lightweight Tikhonov regularization on normal blocks. Building on the same formulation, we introduce a kinematically guided warm-start strategy that enables dynamic trajectory optimization through contact using Mathematical Programs with Complementarity Constraints (MPCC) and demonstrate its effectiveness on contact-rich ball manipulation tasks. In conclusion, CUSP provides a new foundation for unifying contact modeling, simulation, and planning in soft robotics.
Concentric Tube Robot Redundancy Resolution via Velocity/Compliance Manipulability Optimization
May 10, 2023Concentric Tube Robots (CTR) have the potential to enable effective minimally invasive surgeries. While extensive modeling and control schemes have been proposed in the past decade, limited efforts have been made to improve the trajectory tracking performance from the perspective of manipulability , which can be critical to generate safe motion and feasible actuator commands. In this paper, we propose a gradient-based redundancy resolution framework that optimizes velocity/compliance manipulability-based performance indices during trajectory tracking for a kinematically redundant CTR. We efficiently calculate the gradients of manipulabilities by propagating the first- and second-order derivatives of state variables of the Cosserat rod model along the CTR arc length, reducing the gradient computation time by 68\% compared to finite difference method. Task-specific performance indices are optimized by projecting the gradient into the null-space of trajectory tracking. The proposed method is validated in three exemplary scenarios that involve trajectory tracking, obstacle avoidance, and external load compensation, respectively. Simulation results show that the proposed method is able to accomplish the required tasks while commonly used redundancy resolution approaches underperform or even fail.
Design, Modeling, and Redundancy Resolution of Soft Robot for Effective Harvesting
Mar 15, 2023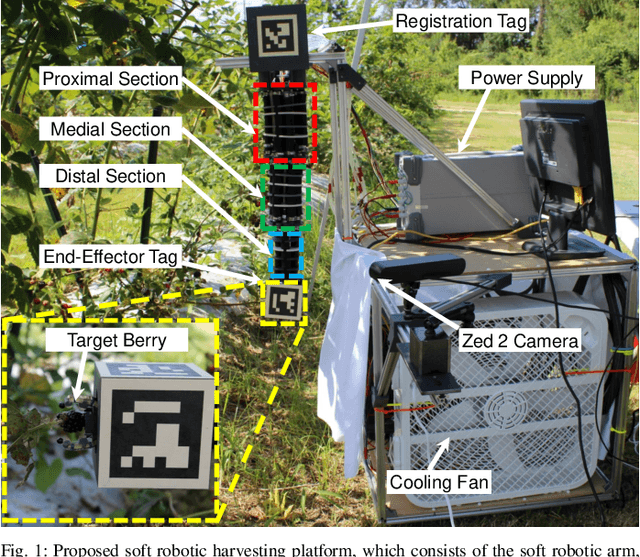
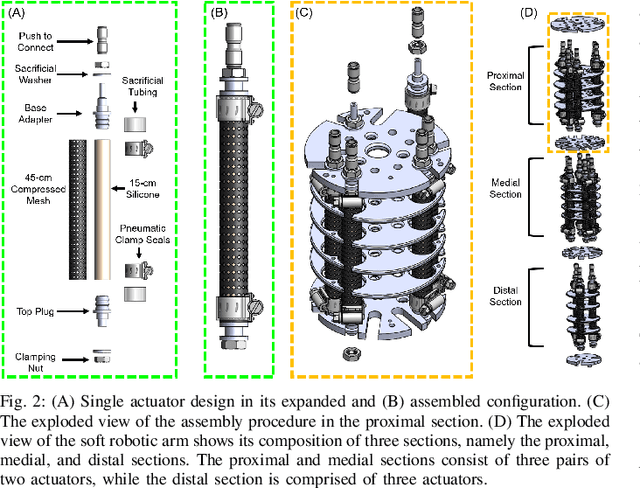
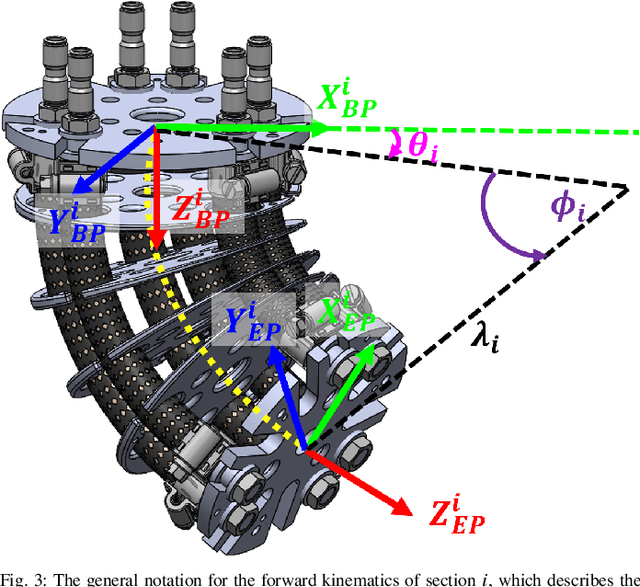
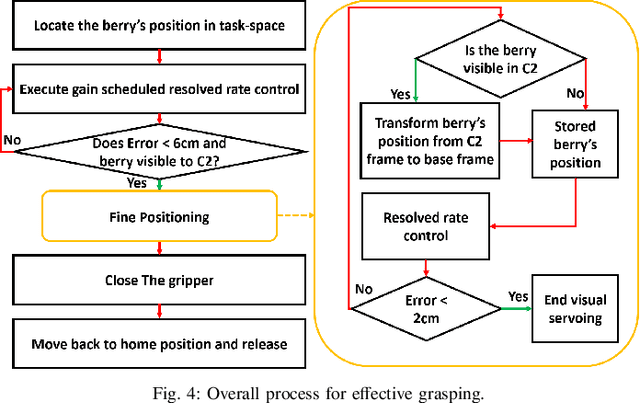
Blackberry harvesting is a labor-intensive and costly process, consuming up to 50\% of the total annual crop hours. This paper presents a solution for robotic harvesting through the design, manufacturing, integration, and control of a pneumatically actuated, kinematically redundant soft arm with a tendon-driven soft robotic gripper. The hardware design is optimized for durability and modularity for practical use. The harvesting process is divided into four stages: initial placement, fine positioning, grasp, and move back to home position. For initial placement, we propose a real-time, continuous gain-scheduled redundancy resolution algorithm for simultaneous position and orientation control with joint-limit avoidance. The algorithm relies solely on visual feedback from an eye-to-hand camera and achieved a position and orientation tracking error of $0.64\pm{0.27}$ mm and $1.08\pm{1.5}^{\circ}$, respectively, in benchtop settings. Following accurate initial placement of the robotic arm, fine positioning is achieved using a combination of eye-in-hand and eye-to-hand visual feedback, reaching an accuracy of $0.75\pm{0.36}$ mm. The system's hardware, feedback framework, and control methods are thoroughly validated through benchtop and field tests, confirming feasibility for practical applications.
Tendon-Driven Soft Robotic Gripper with Integrated Ripeness Sensing for Blackberry Harvesting
Feb 06, 2023Growing global demand for food, coupled with continuing labor shortages, motivates the need for automated agricultural harvesting. While some specialty crops (e.g., apples, peaches, blueberries) can be harvested via existing harvesting modalities, fruits such as blackberries and raspberries require delicate handling to mitigate fruit damage that could significantly impact marketability. This motivates the development of soft robotic solutions that enable efficient, delicate harvesting. This paper presents the design, fabrication, and feasibility testing of a tendon-driven soft gripping system focused on blackberries, which are a fragile fruit susceptible to post-harvest damage. The gripper is both low-cost and small form factor, allowing for the integration of a micro-servo for tendon retraction, a near-infrared (NIR) based blackberry ripeness sensor utilizing the reflectance modality for identifying fully ripe blackberries, and an endoscopic camera for visual servoing with a UR-5. The gripper was used to harvest 139 berries with manual positioning in two separate field tests. Field testing found an average retention force of 2.06 N and 6.08 N for ripe and unripe blackberries, respectively. Sensor tests identified an average reflectance of 16.78 and 21.70 for ripe and unripe blackberries, respectively, indicating a clear distinction between the two ripeness levels. Finally, the soft robotic gripper was integrated onto a UR5 robot arm and successfully harvested fifteen artificial blackberries in a lab setting using visual servoing.
Dynamic Control of Soft Robotic Arm: An Experimental Study
Sep 22, 2022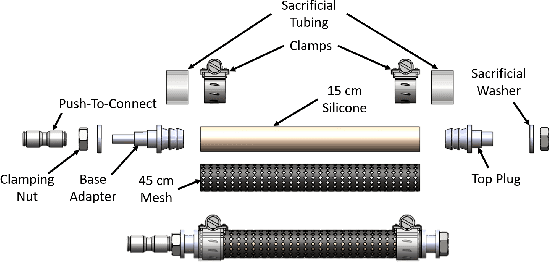
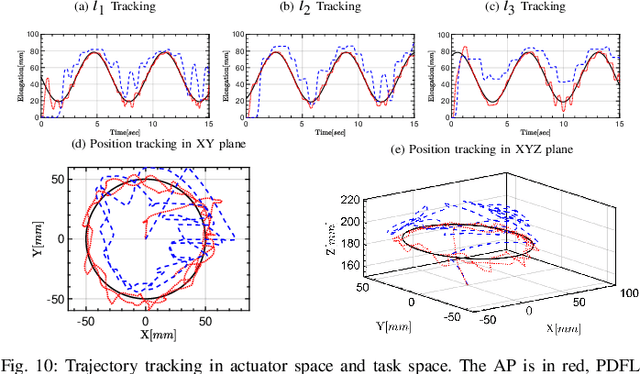
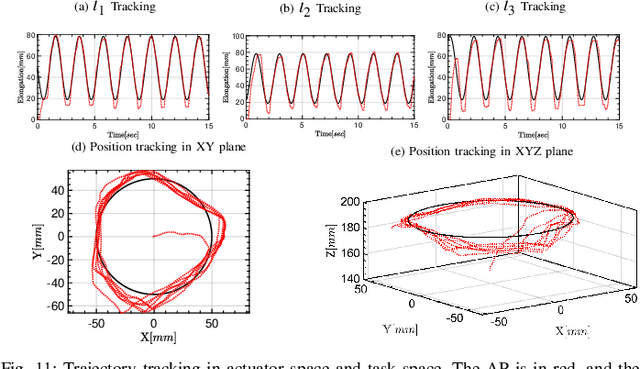
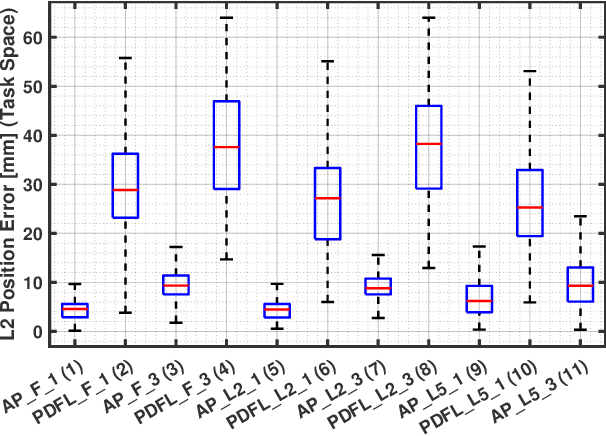
In this paper, a reinforced soft robot prototype with a custom-designed actuator-space string encoder are created to investigate dynamic soft robotic trajectory tracking. The soft robot prototype embedded with the proposed adaptive passivity control and efficient dynamic model make the challenging trajectory tracking tasks possible. We focus on the exploration of tracking accuracy as well as the full potential of the proposed control strategy by performing experimental validations at different operation scenarios: various tracking speed and external disturbance. In all experimental scenarios, the proposed adaptive passivity control outperforms the conventional PD feedback linearization control. The experimental analysis details the advantage and shortcoming of the proposed approach, and points out the next steps for future soft robot dynamic control.
Dynamic Control of Soft Robotic Arm
Oct 11, 2021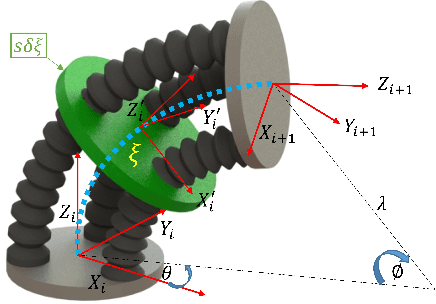
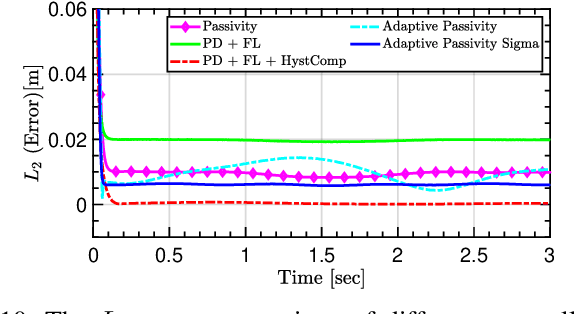
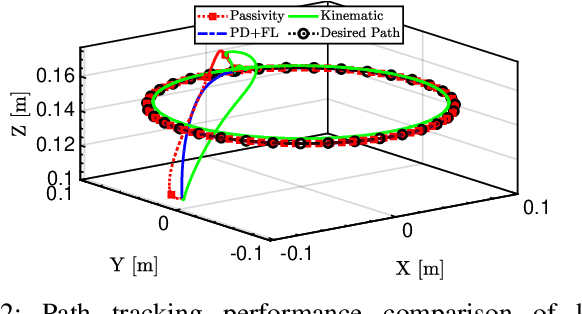
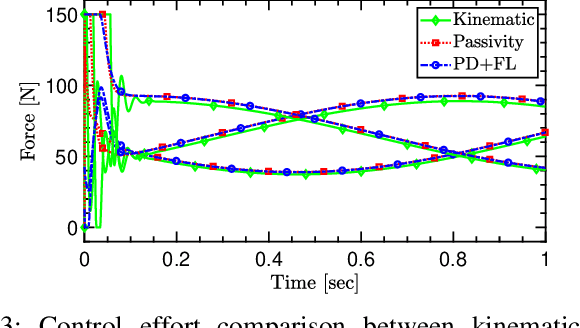
In this article, the control problem of one section pneumatically actuated soft robotic arm is investigated in detail. To date, extensive prior work has been done in soft robotics kinematics and dynamics modeling. Proper controller designs can complement the modeling part since they are able to compensate other effects that have not been considered in the modeling, such as the model uncertainties, system parameter identification error, hysteresis, etc. In this paper, we explored different control approaches (kinematic control, PD+feedback linearization, passivity control, adaptive passivity control) and summarized the advantages and disadvantages of each controller. We further investigated the robot control problem in the practical scenarios when the sensor noise exists, actuator velocity measurement is not available, and the hysteresis effect is non-neglectable. Our simulation results indicated that the adaptive passivity control with sigma modification terms, along with a high-gain observer presents a better performance in comparison with other approaches. Although this paper mainly presented the simulation results of various controllers, the work will pave the way for practical implementation of soft robot control.