 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Critical Formation Control of Non-Holonomic Multi-Robot Systems in Communication-Limited Environments
Jun 19, 2024This paper presents a robust estimator-based safety-critical controller for formation control of non-holonomic mobile robots in communication-limited environments. The proposed decentralized framework integrates a robust state estimator with a formation tracking control law that guarantees inter-agent collision avoidance using control barrier functions. String stability is incorporated into the control design to maintain stability against noise from predecessors in leader-follower formations. Rigorous stability analysis using Lyapunov functions ensures the stability of estimation errors and the convergence of the formation to desired configurations. The effectiveness and robustness of the proposed approach are validated through numerical simulations of various maneuvers and realistic Gazebo experiments involving formations in a warehouse environment. The results demonstrate the controller's ability to maintain safety, achieve precise formation control, and mitigate disturbances in scenarios without inter-robot communication.
PAAMP: Polytopic Action-Set And Motion Planning For Long Horizon Dynamic Motion Planning via Mixed Integer Linear Programming
Mar 16, 2024Optimization methods for long-horizon, dynamically feasible motion planning in robotics tackle challenging non-convex and discontinuous optimization problems. Traditional methods often falter due to the nonlinear characteristics of these problems. We introduce a technique that utilizes learned representations of the system, known as Polytopic Action Sets, to efficiently compute long-horizon trajectories. By employing a suitable sequence of Polytopic Action Sets, we transform the long-horizon dynamically feasible motion planning problem into a Linear Program. This reformulation enables us to address motion planning as a Mixed Integer Linear Program (MILP). We demonstrate the effectiveness of a Polytopic Action-Set and Motion Planning (PAAMP) approach by identifying swing-up motions for a torque-constrained pendulum within approximately 0.75 milliseconds. This approach is well-suited for solving complex motion planning and long-horizon Constraint Satisfaction Problems (CSPs) in dynamic and underactuated systems such as legged and aerial robots.
Learning-Based Design of Off-Policy Gaussian Controllers: Integrating Model Predictive Control and Gaussian Process Regression
Mar 16, 2024This paper presents an off-policy Gaussian Predictive Control (GPC) framework aimed at solving optimal control problems with a smaller computational footprint, thereby facilitating real-time applicability while ensuring critical safety considerations. The proposed controller imitates classical control methodologies by modeling the optimization process through a Gaussian process and employs Gaussian Process Regression to learn from the Model Predictive Control (MPC) algorithm. Notably, the Gaussian Process setup does not incorporate a built-in model, enhancing its applicability to a broad range of control problems. We applied this framework experimentally to a differential drive mobile robot, tasking it with trajectory tracking and obstacle avoidance. Leveraging the off-policy aspect, the controller demonstrated adaptability to diverse trajectories and obstacle behaviors. Simulation experiments confirmed the effectiveness of the proposed GPC method, emphasizing its ability to learn the dynamics of optimal control strategies. Consequently, our findings highlight the significant potential of off-policy Gaussian Predictive Control in achieving real-time optimal control for handling of robotic systems in safety-critical scenarios.
Project-Based Learning for Robot Control Theory: A Robot Operating System (ROS) Based Approach
May 18, 2023Control theory is an important cornerstone of the robotics field and is considered a fundamental subject in an undergraduate and postgraduate robotics curriculum. Furthermore, project-based learning has shown significant benefits in engineering domains, specifically in interdisciplinary fields such as robotics which require hands-on experience to master the discipline adequately. However, designing a project-based learning experience to teach control theory in a hands-on setting can be challenging, due to the rigor of mathematical concepts involved in the subject. Moreover, access to reliable hardware required for a robotics control lab, including the robots, sensors, interfaces, and measurement instruments, may not be feasible in developing countries and even many academic institutions in the US. The current paper presents a set of six project-based assignments for an advanced postgraduate Robot Control course. The assignments leverage the Robot Operating System (ROS), an open-source set of tools, libraries, and software, which is a de facto standard for the development of robotics applications. The use of ROS, along with its physics engine simulation framework, Gazebo, provides a hands-on robotics experience equivalent to working with real hardware. Learning outcomes include: i) theoretical analysis of linear and nonlinear dynamical systems, ii) formulation and implementation of advanced model-based robot control algorithms using classical and modern control theory, and iii) programming and performance evaluation of robotic systems on physics engine robot simulators. Course evaluations and student surveys demonstrate that the proposed project-based assignments successfully bridge the gap between theory and practice, and facilitate learning of control theory concepts and state-of-the-art robotics techniques through a hands-on approach.
Cable Estimation-Based Control for Wire-Borne Underactuated Brachiating Robots: A Combined Direct-Indirect Adaptive Robust Approach
Aug 11, 2020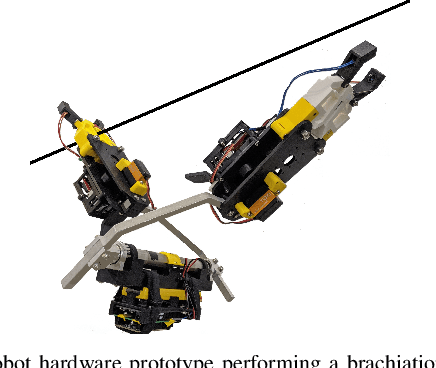
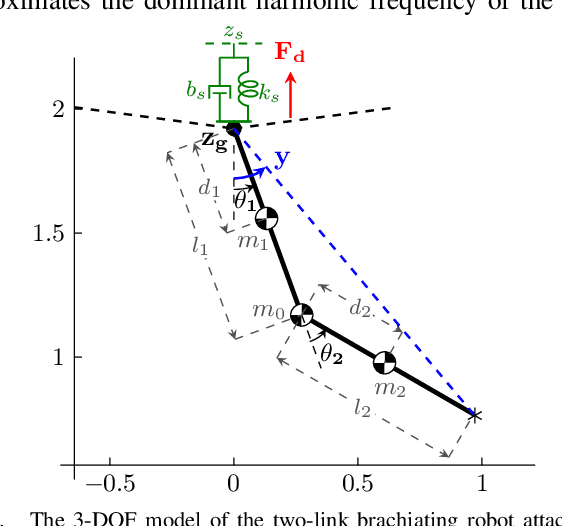
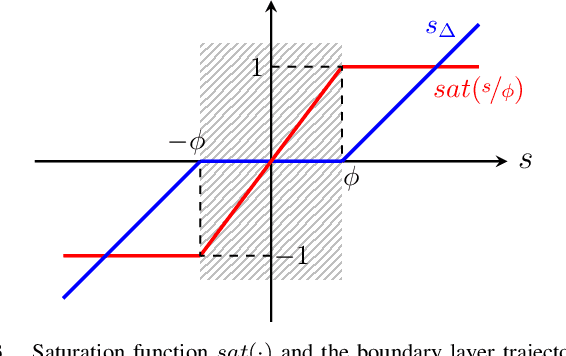
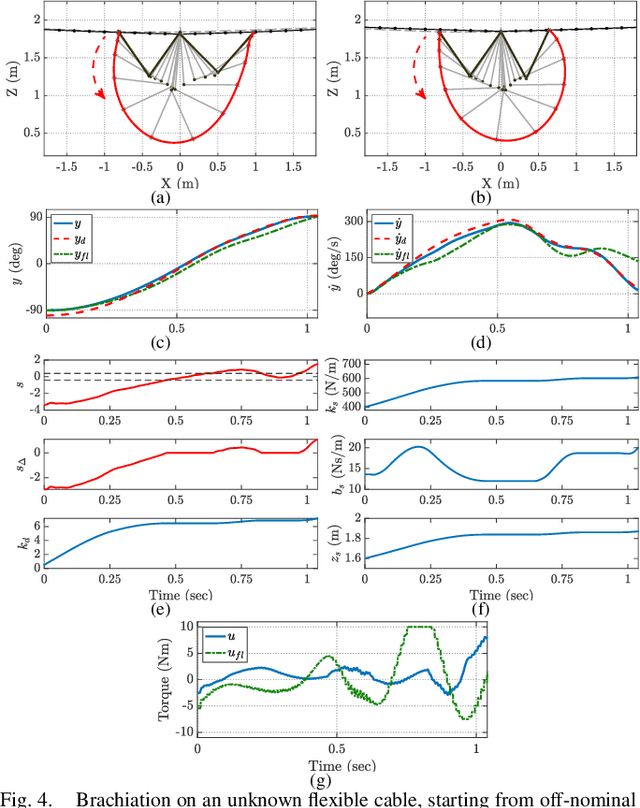
In this paper, we present an online adaptive robust control framework for underactuated brachiating robots traversing flexible cables. Since the dynamic model of a flexible body is unknown in practice, we propose an indirect adaptive estimation scheme to approximate the unknown dynamic effects of the flexible cable as an external force with parametric uncertainties. A boundary layer-based sliding mode control is then designed to compensate for the residual unmodeled dynamics and time-varying disturbances, in which the control gain is updated by an auxiliary direct adaptive control mechanism. Stability analysis and derivation of adaptation laws are carried out through a Lyapunov approach, which formally guarantees the stability and tracking performance of the robot-cable system. Simulation experiments and comparison with a baseline controller show that the combined direct-indirect adaptive robust control framework achieves reliable tracking performance and adaptive system identification, enabling the robot to traverse flexible cables in the presence of unmodeled dynamics, parametric uncertainties and unstructured disturbances.
Robust Control Synthesis and Verification for Wire-Borne Underactuated Brachiating Robots Using Sum-of-Squares Optimization
Jul 23, 2020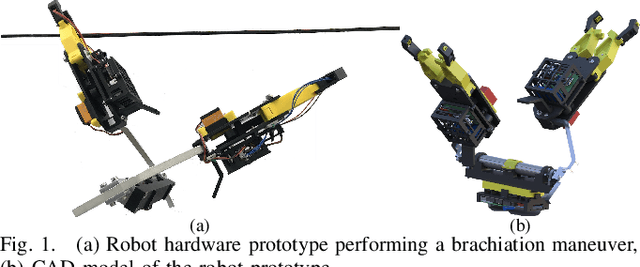
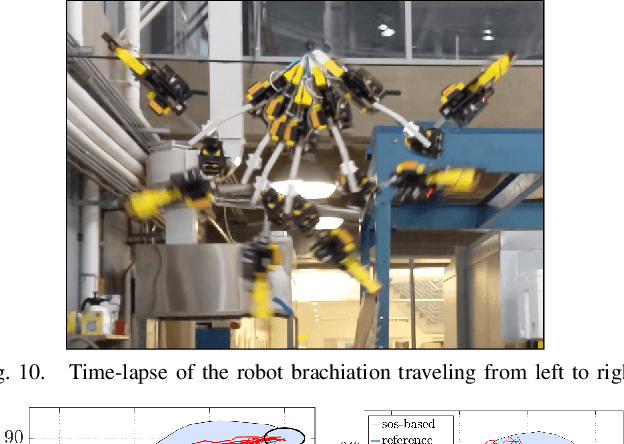
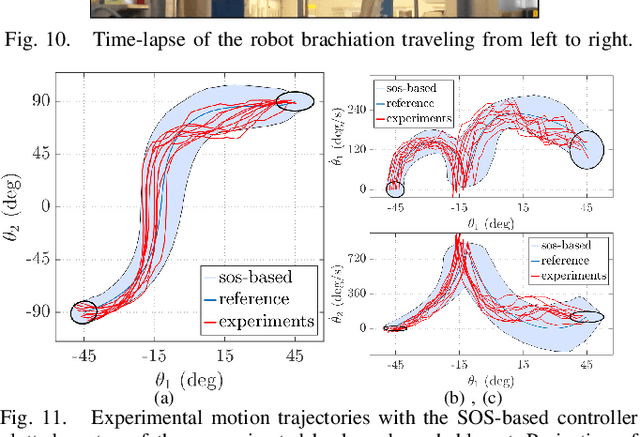
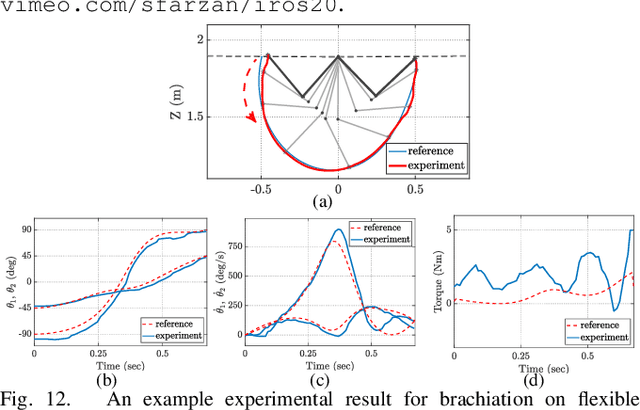
Control of wire-borne underactuated brachiating robots requires a robust feedback control design that can deal with dynamic uncertainties, actuator constraints and unmeasurable states. In this paper, we develop a robust feedback control for brachiating on flexible cables, building on previous work on optimal trajectory generation and time-varying LQR controller design. We propose a novel simplified model for approximation of the flexible cable dynamics, which enables inclusion of parametric model uncertainties in the system. We then use semidefinite programming (SDP) and sum-of-squares (SOS) optimization to synthesize a time-varying feedback control with formal robustness guarantees to account for model uncertainties and unmeasurable states in the system. Through simulation, hardware experiments and comparison with a time-varying LQR controller, it is shown that the proposed robust controller results in relatively large robust backward reachable sets and is able to reliably track a pre-generated optimal trajectory and achieve the desired brachiating motion in the presence of parametric model uncertainties, actuator limits, and unobservable states.
Path Planning in Dynamic Environments Using Time-Warped Grids and a Parallel Implementation
Mar 18, 2019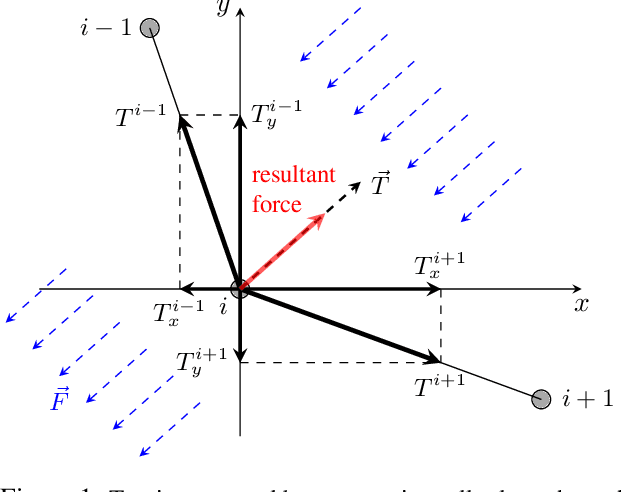
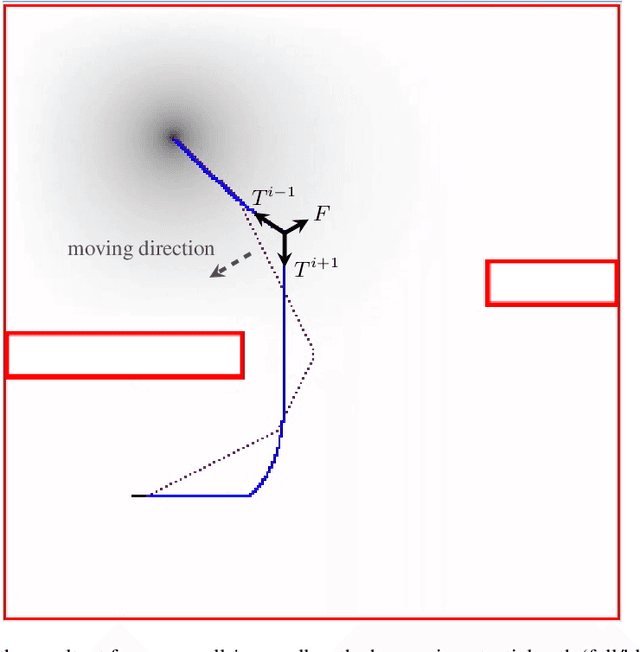
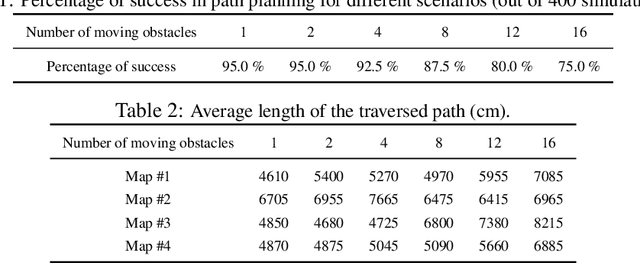
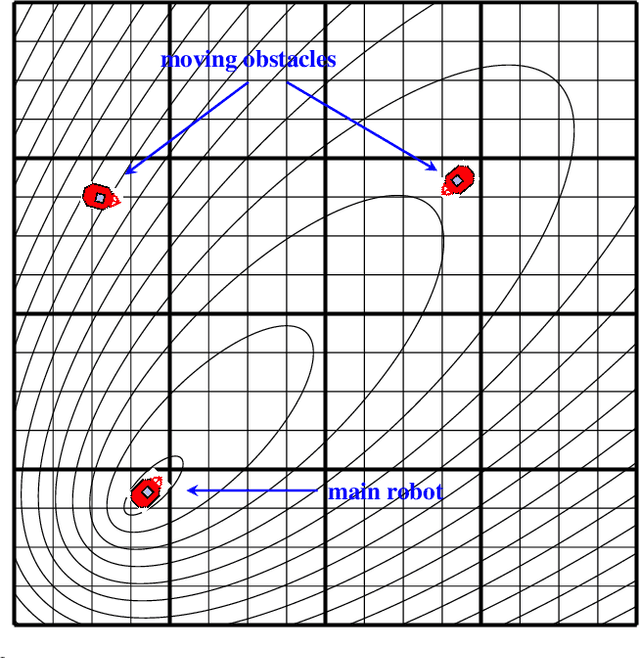
This paper proposes a solution to the problem of smooth path planning for mobile robots in dynamic and unknown environments. A novel concept of Time-Warped Grid is introduced to predict the pose of obstacles in the environment and avoid collisions. The algorithm is implemented using C/C++ and the CUDA programming environment, and combines stochastic estimation (Kalman filter), harmonic potential fields and a rubber band model, and it translates naturally into the parallel paradigm of GPU programming. In simple terms, time-warped grids are progressively wider orbits around the mobile robot. Those orbits represent the variable time intervals estimated by the robot to reach detected obstacles. The proposed method was tested using several simulation scenarios for the Pioneer P3-DX robot, which demonstrated the robustness of the algorithm by finding the optimum path in terms of smoothness, distance, and collision-free, in both static or dynamic environments, and with large number of obstacles.