 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObserving Health Outcomes Using Remote Sensing Imagery and Geo-Context Guided Visual Transformer
Jan 26, 2026Visual transformers have driven major progress in remote sensing image analysis, particularly in object detection and segmentation. Recent vision-language and multimodal models further extend these capabilities by incorporating auxiliary information, including captions, question and answer pairs, and metadata, which broadens applications beyond conventional computer vision tasks. However, these models are typically optimized for semantic alignment between visual and textual content rather than geospatial understanding, and therefore are not suited for representing or reasoning with structured geospatial layers. In this study, we propose a novel model that enhances remote sensing imagery processing with guidance from auxiliary geospatial information. Our approach introduces a geospatial embedding mechanism that transforms diverse geospatial data into embedding patches that are spatially aligned with image patches. To facilitate cross-modal interaction, we design a guided attention module that dynamically integrates multimodal information by computing attention weights based on correlations with auxiliary data, thereby directing the model toward the most relevant regions. In addition, the module assigns distinct roles to individual attention heads, allowing the model to capture complementary aspects of the guidance information and improving the interpretability of its predictions. Experimental results demonstrate that the proposed framework outperforms existing pretrained geospatial foundation models in predicting disease prevalence, highlighting its effectiveness in multimodal geospatial understanding.
High-Throughput and Accurate 3D Scanning of Cattle Using Time-of-Flight Sensors and Deep Learning
Aug 07, 2023We introduce a high throughput 3D scanning solution specifically designed to precisely measure cattle phenotypes. This scanner leverages an array of depth sensors, i.e. time-of-flight (Tof) sensors, each governed by dedicated embedded devices. The system excels at generating high-fidelity 3D point clouds, thus facilitating an accurate mesh that faithfully reconstructs the cattle geometry on the fly. In order to evaluate the performance of our system, we have implemented a two-fold validation process. Initially, we test the scanner's competency in determining volume and surface area measurements within a controlled environment featuring known objects. Secondly, we explore the impact and necessity of multi-device synchronization when operating a series of time-of-flight sensors. Based on the experimental results, the proposed system is capable of producing high-quality meshes of untamed cattle for livestock studies.
Achieving Unit-Consistent Pseudo-Inverse-based Path-Planning for Redundant Incommensurate Robotic Manipulators
Aug 05, 2023



In this paper, we review and compare several velocity-level and acceleration-level Pseudo-Inverse-based Path Planning (PPP) and Pseudo-Inverse-based Repetitive Motion Planning (PRMP) schemes based on the kinematic model of robotic manipulators. We show that without unit consistency in the pseudo-inverse computation, path planning of incommensurate robotic manipulators will fail. Also, we investigated the robustness and noise tolerance of six PPP and PRMP schemes in the literature against various noise types (i.e. zero, constant, time-varying and random noises). We compared the simulated results using two redundant robotic manipulators: a 3DoF (2RP), and a 7DoF (2RP4R). These experimental results demonstrate that the improper Generalized Inverse (GI) with arbitrary selection of unit and/or in the presence of noise can lead to unexpected behavior of the robot, while producing wrong instantaneous outputs in the task space, which results in distortions and/or failures in the execution of the planned path. Finally, we propose and demonstrate the efficacy of the Mixed Inverse (MX) as the proper GI to achieve unit-consistency in path planning.
Choosing the Correct Generalized Inverse for the Numerical Solution of the Inverse Kinematics of Incommensurate Robotic Manipulators
Aug 05, 2023



Numerical methods for Inverse Kinematics (IK) employ iterative, linear approximations of the IK until the end-effector is brought from its initial pose to the desired final pose. These methods require the computation of the Jacobian of the Forward Kinematics (FK) and its inverse in the linear approximation of the IK. Despite all the successful implementations reported in the literature, Jacobian-based IK methods can still fail to preserve certain useful properties if an improper matrix inverse, e.g. Moore-Penrose (MP), is employed for incommensurate robotic systems. In this paper, we propose a systematic, robust and accurate numerical solution for the IK problem using the Mixed (MX) Generalized Inverse (GI) applied to any type of Jacobians (e.g., analytical, numerical or geometric) derived for any commensurate and incommensurate robot. This approach is robust to whether the system is under-determined (less than 6 DoF) or over-determined (more than 6 DoF). We investigate six robotics manipulators with various Degrees of Freedom (DoF) to demonstrate that commonly used GI's fail to guarantee the same system behaviors when the units are varied for incommensurate robotics manipulators. In addition, we evaluate the proposed methodology as a global IK solver and compare against well-known IK methods for redundant manipulators. Based on the experimental results, we conclude that the right choice of GI is crucial in preserving certain properties of the system (i.e. unit-consistency).
Path Planning in Dynamic Environments Using Time-Warped Grids and a Parallel Implementation
Mar 18, 2019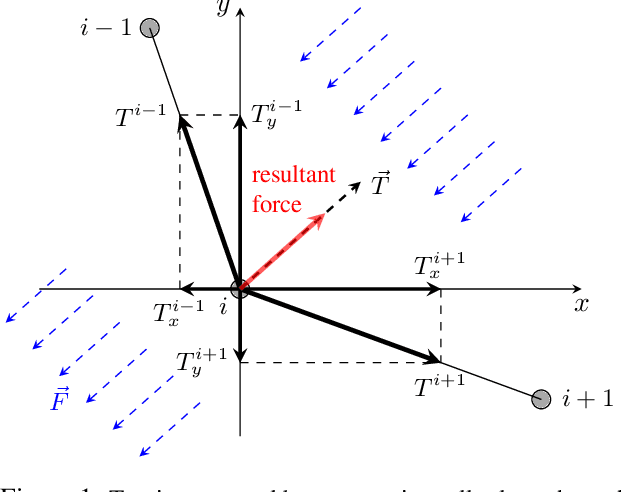
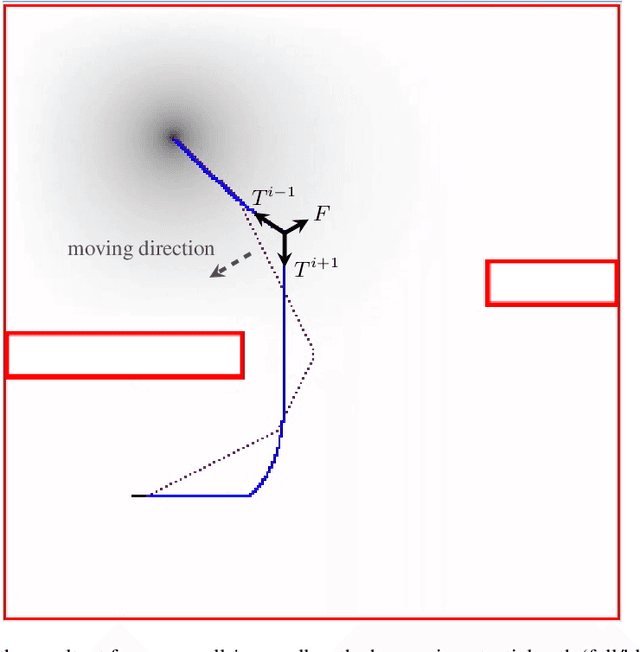
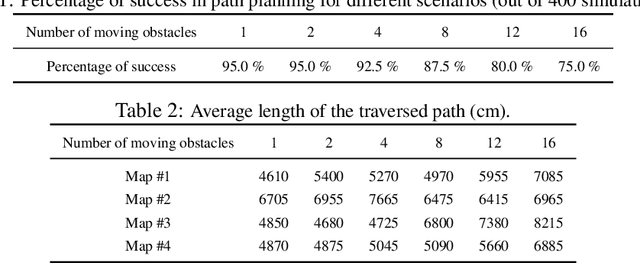
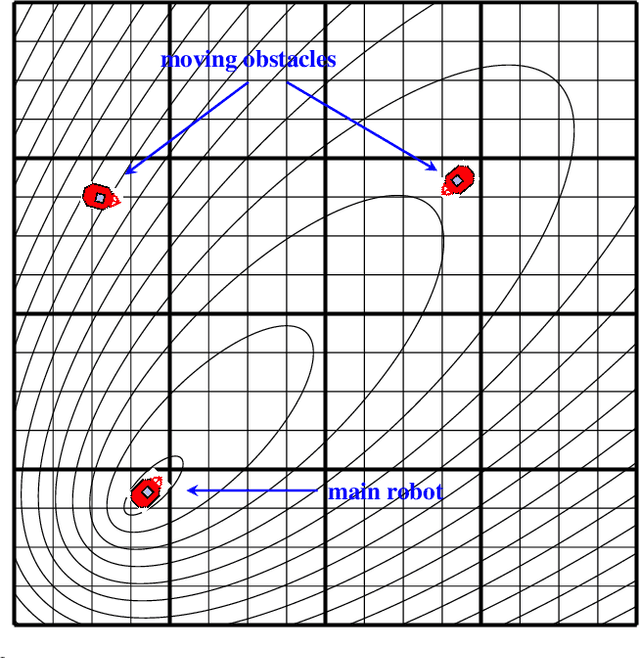
This paper proposes a solution to the problem of smooth path planning for mobile robots in dynamic and unknown environments. A novel concept of Time-Warped Grid is introduced to predict the pose of obstacles in the environment and avoid collisions. The algorithm is implemented using C/C++ and the CUDA programming environment, and combines stochastic estimation (Kalman filter), harmonic potential fields and a rubber band model, and it translates naturally into the parallel paradigm of GPU programming. In simple terms, time-warped grids are progressively wider orbits around the mobile robot. Those orbits represent the variable time intervals estimated by the robot to reach detected obstacles. The proposed method was tested using several simulation scenarios for the Pioneer P3-DX robot, which demonstrated the robustness of the algorithm by finding the optimum path in terms of smoothness, distance, and collision-free, in both static or dynamic environments, and with large number of obstacles.