 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerfectly Undetectable Reflection and Scaling False Data Injection Attacks via Affine Transformation on Mobile Robot Trajectory Tracking Control
Aug 19, 2024With the increasing integration of cyber-physical systems (CPS) into critical applications, ensuring their resilience against cyberattacks is paramount. A particularly concerning threat is the vulnerability of CPS to deceptive attacks that degrade system performance while remaining undetected. This paper investigates perfectly undetectable false data injection attacks (FDIAs) targeting the trajectory tracking control of a non-holonomic mobile robot. The proposed attack method utilizes affine transformations of intercepted signals, exploiting weaknesses inherent in the partially linear dynamic properties and symmetry of the nonlinear plant. The feasibility and potential impact of these attacks are validated through experiments using a Turtlebot 3 platform, highlighting the urgent need for sophisticated detection mechanisms and resilient control strategies to safeguard CPS against such threats. Furthermore, a novel approach for detection of these attacks called the state monitoring signature function (SMSF) is introduced. An example SMSF, a carefully designed function resilient to FDIA, is shown to be able to detect the presence of a FDIA through signatures based on systems states.
Resolution-Enhanced MRI-Guided Navigation of Spinal Cellular Injection Robot
Jun 09, 2020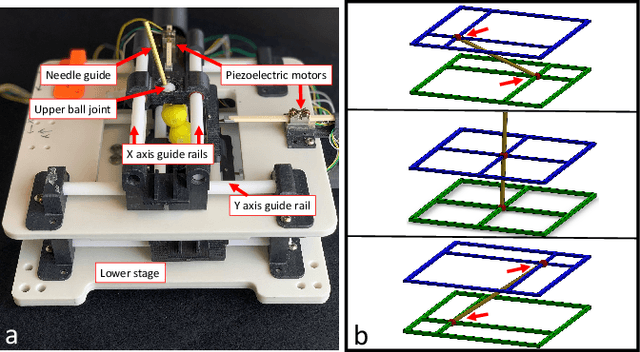
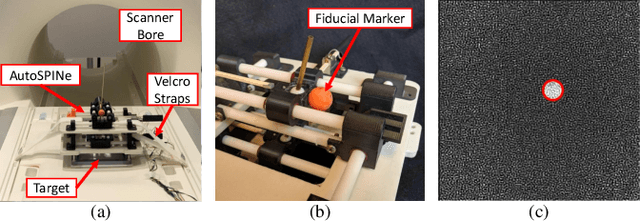

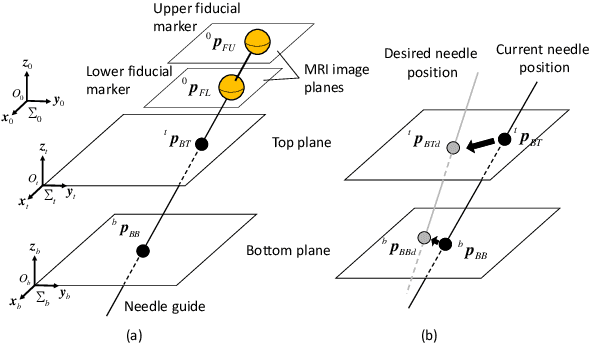
This paper presents a method of navigating a surgical robot beyond the resolution of magnetic resonance imaging (MRI) by using a resolution enhancement technique enabled by high-precision piezoelectric actuation. The surgical robot was specifically designed for injecting stem cells into the spinal cord. This particular therapy can be performed in a shorter time by using a MRI-compatible robotic platform than by using a manual needle positioning platform. Imaging resolution of fiducial markers attached to the needle guide tubing was enhanced by reconstructing a high-resolution image from multiple images with sub-pixel movements of the robot. The parallel-plane direct-drive needle positioning mechanism positioned the needle guide with a high spatial precision that is two orders of magnitude higher than typical MRI resolution up to 1 mm. Reconstructed resolution enhanced images were used to navigate the robot precisely that would not have been possible by using standard MRI. Experiments were conducted to verify the effectiveness of the proposed enhanced-resolution image-guided intervention.