 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning and Control of an Overactuated 4-Wheel Drive with Constrained Independent Steering
Oct 21, 2025This paper addresses motion planning and con- trol of an overactuated 4-wheel drive train with independent steering (4WIS) where mechanical constraints prevent the wheels from executing full 360-degree rotations (swerve). The configuration space of such a robot is constrained and contains discontinuities that affect the smoothness of the robot motion. We introduce a mathematical formulation of the steering constraints and derive discontinuity planes that partition the velocity space into regions of smooth and efficient motion. We further design the motion planner for path tracking and ob- stacle avoidance that explicitly accounts for swerve constraints and the velocity transition smoothness. The motion controller uses local feedback to generate actuation from the desired velocity, while properly handling the discontinuity crossing by temporarily stopping the motion and repositioning the wheels. We implement the proposed motion planner as an extension to ROS Navigation package and evaluate the system in simulation and on a physical robot.
Trust Through Transparency: Explainable Social Navigation for Autonomous Mobile Robots via Vision-Language Models
Apr 07, 2025

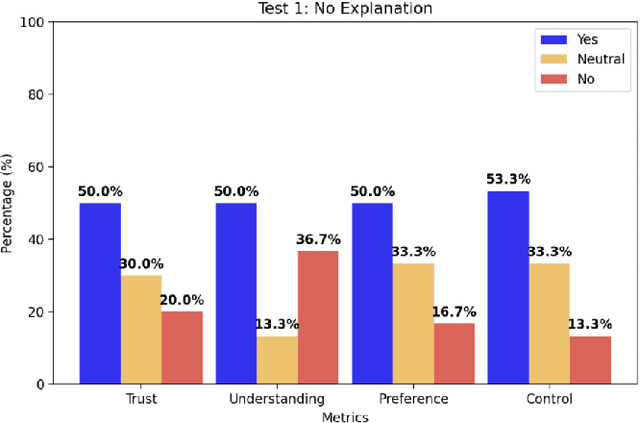

Service and assistive robots are increasingly being deployed in dynamic social environments; however, ensuring transparent and explainable interactions remains a significant challenge. This paper presents a multimodal explainability module that integrates vision language models and heat maps to improve transparency during navigation. The proposed system enables robots to perceive, analyze, and articulate their observations through natural language summaries. User studies (n=30) showed a preference of majority for real-time explanations, indicating improved trust and understanding. Our experiments were validated through confusion matrix analysis to assess the level of agreement with human expectations. Our experimental and simulation results emphasize the effectiveness of explainability in autonomous navigation, enhancing trust and interpretability.
A Virtual Fencing Framework for Safe and Efficient Collaborative Robotics
Mar 26, 2025Collaborative robots (cobots) increasingly operate alongside humans, demanding robust real-time safeguarding. Current safety standards (e.g., ISO 10218, ANSI/RIA 15.06, ISO/TS 15066) require risk assessments but offer limited guidance for real-time responses. We propose a virtual fencing approach that detects and predicts human motion, ensuring safe cobot operation. Safety and performance tradeoffs are modeled as an optimization problem and solved via sequential quadratic programming. Experimental validation shows that our method minimizes operational pauses while maintaining safety, providing a modular solution for human-robot collaboration.
LLM-Enhanced Path Planning: Safe and Efficient Autonomous Navigation with Instructional Inputs
Dec 03, 2024



Autonomous navigation guided by natural language instructions is essential for improving human-robot interaction and enabling complex operations in dynamic environments. While large language models (LLMs) are not inherently designed for planning, they can significantly enhance planning efficiency by providing guidance and informing constraints to ensure safety. This paper introduces a planning framework that integrates LLMs with 2D occupancy grid maps and natural language commands to improve spatial reasoning and task execution in resource-limited settings. By decomposing high-level commands and real-time environmental data, the system generates structured navigation plans for pick-and-place tasks, including obstacle avoidance, goal prioritization, and adaptive behaviors. The framework dynamically recalculates paths to address environmental changes and aligns with implicit social norms for seamless human-robot interaction. Our results demonstrates the potential of LLMs to design context-aware system to enhance navigation efficiency and safety in industrial and dynamic environments.
Safety Verification for Evasive Collision Avoidance in Autonomous Vehicles with Enhanced Resolutions
Nov 05, 2024This paper presents a comprehensive hazard analysis, risk assessment, and loss evaluation for an Evasive Minimum Risk Maneuvering (EMRM) system designed for autonomous vehicles. The EMRM system is engineered to enhance collision avoidance and mitigate loss severity by drawing inspiration from professional drivers who perform aggressive maneuvers while maintaining stability for effective risk mitigation. Recent advancements in autonomous vehicle technology demonstrate a growing capability for high-performance maneuvers. This paper discusses a comprehensive safety verification process and establishes a clear safety goal to enhance testing validation. The study systematically identifies potential hazards and assesses their risks to overall safety and the protection of vulnerable road users. A novel loss evaluation approach is introduced, focusing on the impact of mitigation maneuvers on loss severity. Additionally, the proposed mitigation integrity level can be used to verify the minimum-risk maneuver feature. This paper applies a verification method to evasive maneuvering, contributing to the development of more reliable active safety features in autonomous driving systems.