 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Verification for Evasive Collision Avoidance in Autonomous Vehicles with Enhanced Resolutions
Nov 05, 2024This paper presents a comprehensive hazard analysis, risk assessment, and loss evaluation for an Evasive Minimum Risk Maneuvering (EMRM) system designed for autonomous vehicles. The EMRM system is engineered to enhance collision avoidance and mitigate loss severity by drawing inspiration from professional drivers who perform aggressive maneuvers while maintaining stability for effective risk mitigation. Recent advancements in autonomous vehicle technology demonstrate a growing capability for high-performance maneuvers. This paper discusses a comprehensive safety verification process and establishes a clear safety goal to enhance testing validation. The study systematically identifies potential hazards and assesses their risks to overall safety and the protection of vulnerable road users. A novel loss evaluation approach is introduced, focusing on the impact of mitigation maneuvers on loss severity. Additionally, the proposed mitigation integrity level can be used to verify the minimum-risk maneuver feature. This paper applies a verification method to evasive maneuvering, contributing to the development of more reliable active safety features in autonomous driving systems.
Reactive Integrated Mission and Motion planning
Nov 06, 2017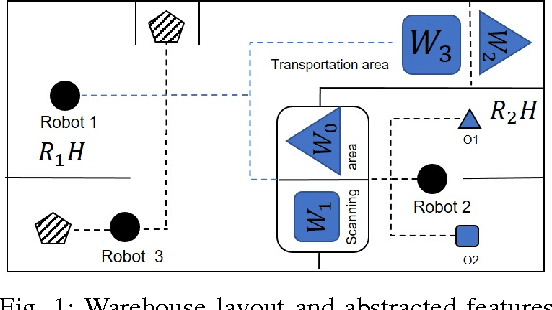
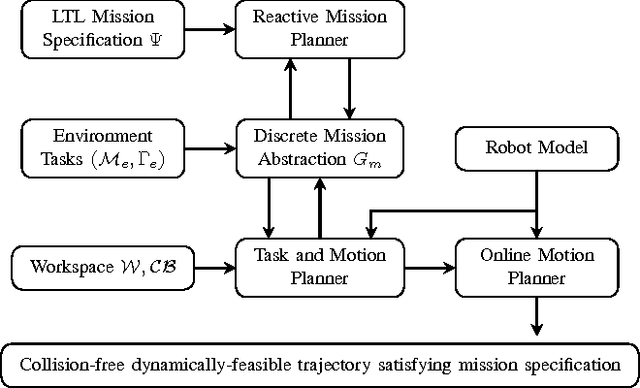
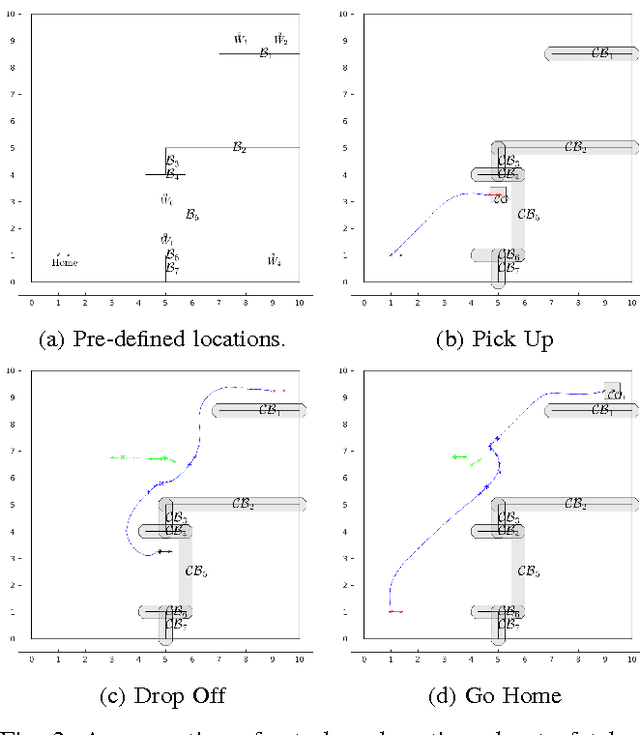
Correct-by-construction manipulation planning in a dynamic environment, where other agents can manipulate objects in the workspace, is a challenging problem. The tight coupling of actions and motions between agents and complexity of mission specifications makes the problem computationally intractable. This paper presents a reactive integrated mission and motion planning for mobile-robot manipulator systems operating in a partially known environment. We introduce a multi-layered synergistic framework that receives high-level mission specifications expressed in linear temporal logic and generates dynamically-feasible and collision-free motion trajectories to achieve it. In the high-level layer, a mission planner constructs a symbolic two-player game between the robots and their environment to synthesis a strategy that adapts to changes in the workspace imposed by other robots. A bilateral synergistic layer is developed to map the designed mission plan to an integrated task and motion planner, constructing a set of robot tasks to move the objects according to the mission strategy. In the low-level planning stage, verifiable motion controllers are designed that can be incrementally composed to guarantee a safe motion planning for each high-level induced task. The proposed framework is illustrated with a multi-robot warehouse example with the mission of moving objects to various locations.