 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Trajectory Synthesis for Real-Time Temporal Logic
Sep 14, 2020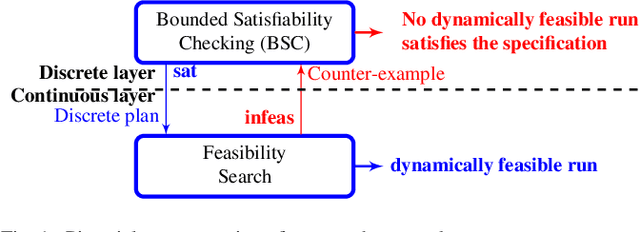
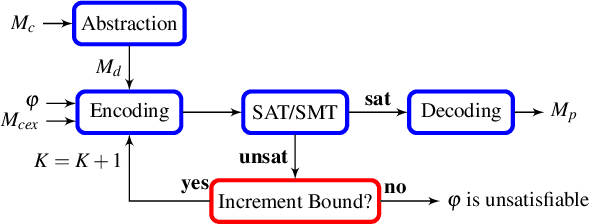
Many safety-critical systems must achieve high-level task specifications with guaranteed safety and correctness. Much recent progress towards this goal has been made through controller synthesis from temporal logic specifications. Existing approaches, however, have been limited to relatively short and simple specifications. Furthermore, existing methods either consider some prior discretization of the state-space, deal only with a convex fragment of temporal logic, or are not provably complete. We propose a scalable, provably complete algorithm that synthesizes continuous trajectories to satisfy non-convex \gls*{rtl} specifications. We separate discrete task planning and continuous motion planning on-the-fly and harness highly efficient boolean satisfiability (SAT) and \gls*{lp} solvers to find dynamically feasible trajectories that satisfy non-convex \gls*{rtl} specifications for high dimensional systems. The proposed design algorithms are proven sound and complete, and simulation results demonstrate our approach's scalability.
Formal Connections between Template and Anchor Models via Approximate Simulation
Sep 20, 2019



Reduced-order template models like the Linear Inverted Pendulum (LIP) and Spring-Loaded Inverted Pendulum (SLIP) are widely used tools for controlling high-dimensional humanoid robots. However, connections between templates and whole-body models have lacked formal underpinnings, preventing formal guarantees when it comes to integrated controller design. We take a small step towards addressing this gap by considering the notion of approximate simulation. Derived from simulation relations for discrete transition systems in formal methods, approximate similarity means that the outputs of two systems can remain $\epsilon$-close. In this paper, we consider the case of controlling a balancer via planning with the LIP model. We show that the balancer approximately simulates the LIP and derive linear constraints that are sufficient conditions for maintaining ground contact. This allows for rapid planning and replanning with the template model by solving a quadratic program that enforces contact constraints in the full model. We demonstrate the efficacy of this planning and control paradigm in a simulated push recovery scenario for a planar 4-link balancer.
Scalable Integrated Task and Motion Planning from Signal Temporal Logic Specifications
Oct 20, 2018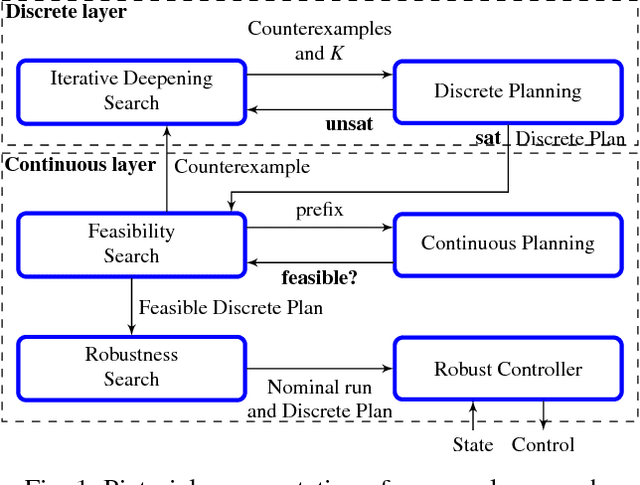
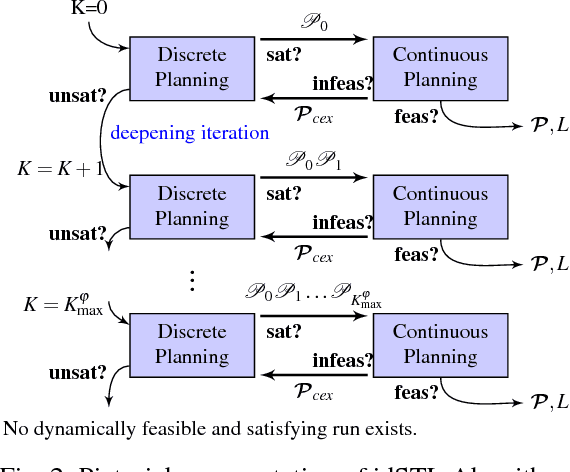
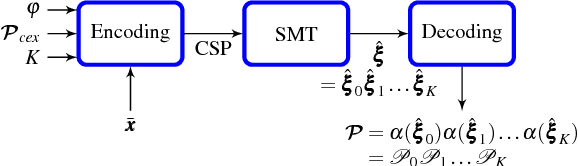
Many safety-critical systems must achieve high-level task specifications with guaranteed safety and correctness. Much recent progress towards this goal has been made through controller synthesis from signal temporal logic (STL) specifications. Existing approaches, however, either consider some a priori discretization of the state-space, deal only with a convex fragment of STL, or are not provably complete. We propose a scalable, provably complete algorithm that directly synthesizes continuous trajectories to satisfy non-convex STL specifications. We separate discrete task planning and continuous motion planning on the fly and harness highly efficient satisfiability modulo theories (SMT) and linear programming (LP) solvers to find dynamically feasible trajectories for high dimensional systems that satisfies non-convex STL specifications. The proposed design algorithms are proved sound and complete, and simulation results demonstrate the scalability of our approach.
Reactive Integrated Mission and Motion planning
Nov 06, 2017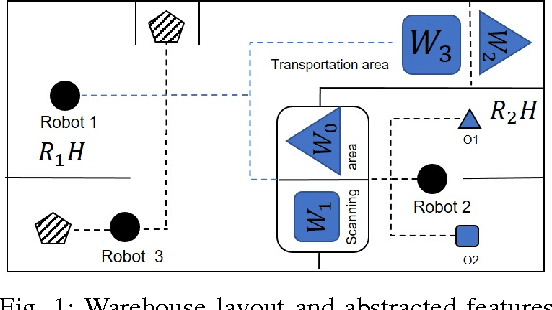
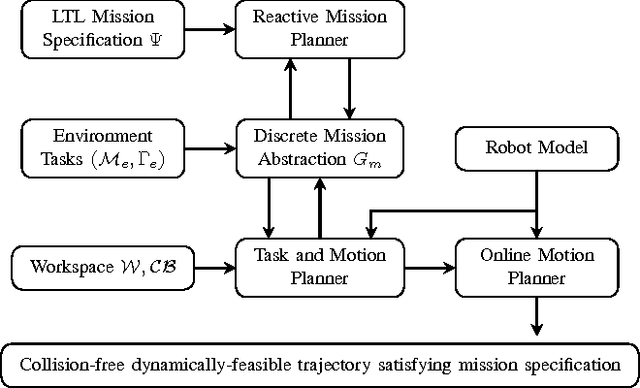
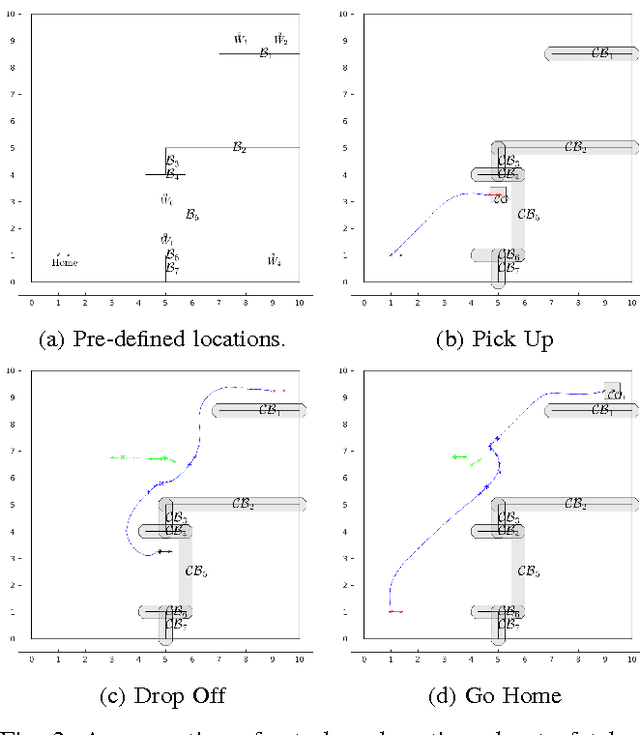
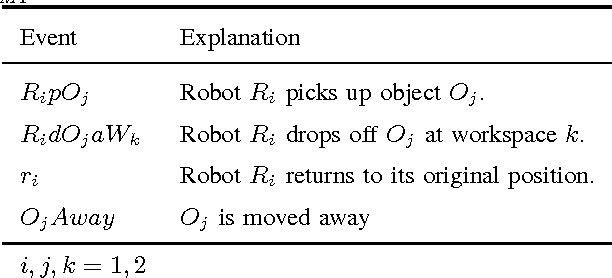
Correct-by-construction manipulation planning in a dynamic environment, where other agents can manipulate objects in the workspace, is a challenging problem. The tight coupling of actions and motions between agents and complexity of mission specifications makes the problem computationally intractable. This paper presents a reactive integrated mission and motion planning for mobile-robot manipulator systems operating in a partially known environment. We introduce a multi-layered synergistic framework that receives high-level mission specifications expressed in linear temporal logic and generates dynamically-feasible and collision-free motion trajectories to achieve it. In the high-level layer, a mission planner constructs a symbolic two-player game between the robots and their environment to synthesis a strategy that adapts to changes in the workspace imposed by other robots. A bilateral synergistic layer is developed to map the designed mission plan to an integrated task and motion planner, constructing a set of robot tasks to move the objects according to the mission strategy. In the low-level planning stage, verifiable motion controllers are designed that can be incrementally composed to guarantee a safe motion planning for each high-level induced task. The proposed framework is illustrated with a multi-robot warehouse example with the mission of moving objects to various locations.
Formal Design of Robot Integrated Task and Motion Planning
Dec 15, 2016



Integrated Task and Motion Planning (ITMP) for mobile robots in a dynamic environment with moving obstacles is a challenging research question and attracts more and more attentions recently. Most existing methods either restrict to static environments or lack performance guarantees. This motivates us to investigate the ITMP problem using formal methods and propose a bottom-up compositional design approach called CoSMoP (Composition of Safe Motion Primitives). Our basic idea is to synthesize a global motion plan through composing simple local moves and actions, and to achieve its performance guarantee through modular and incremental verifications. The design consists of two steps. First, basic motion primitives are designed and verified locally. Then, a global motion path is built upon these certified motion primitives by concatenating them together. In particular, we model the motion primitives as hybrid automata and verify their safety through formulating as Differential Dynamic Logic (d$\mathcal{L}$). Furthermore, these proven safe motion primitives are composed based on an encoding to Satisfiability Modulo Theories (SMT) that takes into account the geometric constraints. Since d$\mathcal{L}$ allows compositional verification, the sequential composition of the safe motion primitives also preserves safety properties. Therefore, the CoSMoP generates correct plans for given task specifications that are formally proven safe even for moving obstacles. Illustrative examples are presented to show the effectiveness of the methods.
Combined Top-Down and Bottom-Up Approaches to Performance-guaranteed Integrated Task and Motion Planning of Cooperative Multi-agent Systems
Dec 15, 2016

We propose a hierarchical design framework to automatically synthesize coordination schemes and control policies for cooperative multi-agent systems to fulfill formal performance requirements, by associating a bottom-up reactive motion controller with a top-down mission plan. On one hand, starting from a global mission that is specified as a regular language over all the agents' mission capabilities, a mission planning layer sits on the top of the proposed framework, decomposing the global mission into local tasks that are in consistency with each agent's individual capabilities, and compositionally justifying whether the achievement of local tasks implies the satisfaction of the global mission via an assume-guarantee paradigm. On the other hand, bottom-up motion plans associated with each agent are synthesized corresponding to the obtained local missions by composing basic motion primitives, which are verified safe by differential dynamic logic (d$\mathcal{L}$), through a Satisfiability Modulo Theories (SMT) solver that searches feasible solutions in face of constraints imposed by local task requirements and the environment description. It is shown that the proposed framework can handle dynamical environments as the motion primitives possess reactive features, making the motion plans adaptive to local environmental changes. Furthermore, on-line mission reconfiguration can be triggered by the motion planning layer once no feasible solutions can be found through the SMT solver. The effectiveness of the overall design framework is validated by an automated warehouse case study.
SafeGuardPF: Safety Guaranteed Reactive Potential Fields for Mobile Robots in Unknown and Dynamic Environments
Sep 22, 2016



An autonomous navigation with proven collision avoidance in unknown and dynamic environments is still a challenge, particularly when there are moving obstacles. A popular approach to collision avoidance in the face of moving obstacles is based on model predictive algorithms, which, however, may be computationally expensive. Hence, we adopt a reactive potential field approach here. At every cycle, the proposed approach requires only current robot states relative to the closest obstacle point to find the potential field in the current position; thus, it is more computationally efficient and more suitable to scale up for multiple agent scenarios. Our main contribution here is to write the reactive potential field based motion controller as a hybrid automaton, and then formally verify its safety using differential dynamic logic. In particular, we can guarantee a passive safety property, which means that collisions cannot occur if the robot is to blame, namely a collision can occur only if the robot is at rest. The proposed controller and verification results are demonstrated via simulations and implementation on a Pioneer P3-AT robot.