 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Layer K-means Approach for Multi-Sensor Data Pattern Recognition in Multi-Target Localization
May 30, 2017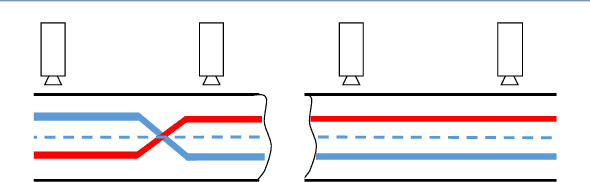
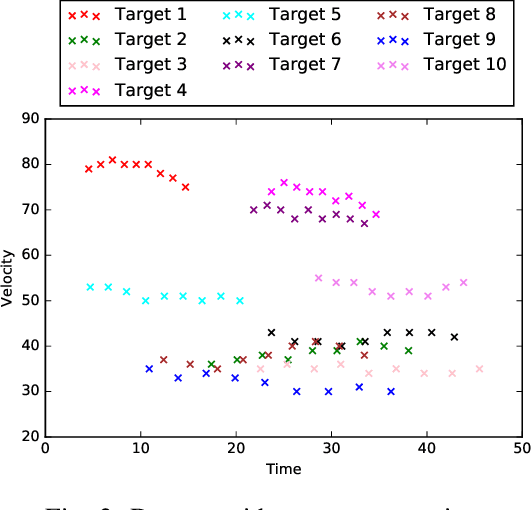
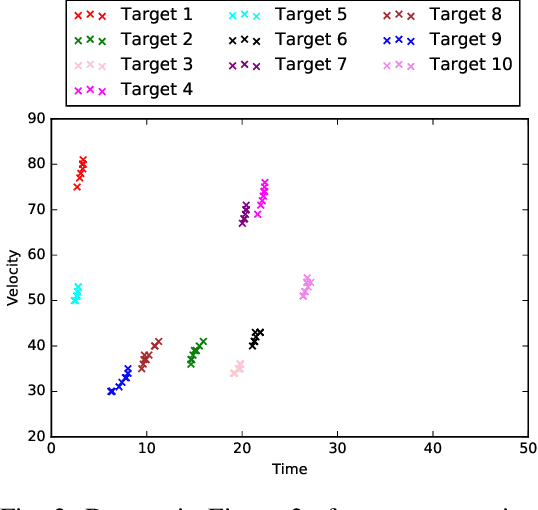
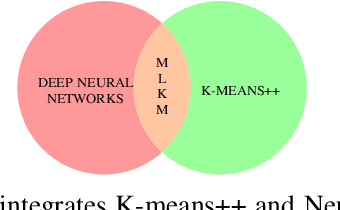
Data-target association is an important step in multi-target localization for the intelligent operation of un- manned systems in numerous applications such as search and rescue, traffic management and surveillance. The objective of this paper is to present an innovative data association learning approach named multi-layer K-means (MLKM) based on leveraging the advantages of some existing machine learning approaches, including K-means, K-means++, and deep neural networks. To enable the accurate data association from different sensors for efficient target localization, MLKM relies on the clustering capabilities of K-means++ structured in a multi-layer framework with the error correction feature that is motivated by the backpropogation that is well-known in deep learning research. To show the effectiveness of the MLKM method, numerous simulation examples are conducted to compare its performance with K-means, K-means++, and deep neural networks.
Multi-Sensor Data Pattern Recognition for Multi-Target Localization: A Machine Learning Approach
Feb 28, 2017



Data-target pairing is an important step towards multi-target localization for the intelligent operation of unmanned systems. Target localization plays a crucial role in numerous applications, such as search, and rescue missions, traffic management and surveillance. The objective of this paper is to present an innovative target location learning approach, where numerous machine learning approaches, including K-means clustering and supported vector machines (SVM), are used to learn the data pattern across a list of spatially distributed sensors. To enable the accurate data association from different sensors for accurate target localization, appropriate data pre-processing is essential, which is then followed by the application of different machine learning algorithms to appropriately group data from different sensors for the accurate localization of multiple targets. Through simulation examples, the performance of these machine learning algorithms is quantified and compared.
SafeGuardPF: Safety Guaranteed Reactive Potential Fields for Mobile Robots in Unknown and Dynamic Environments
Sep 22, 2016



An autonomous navigation with proven collision avoidance in unknown and dynamic environments is still a challenge, particularly when there are moving obstacles. A popular approach to collision avoidance in the face of moving obstacles is based on model predictive algorithms, which, however, may be computationally expensive. Hence, we adopt a reactive potential field approach here. At every cycle, the proposed approach requires only current robot states relative to the closest obstacle point to find the potential field in the current position; thus, it is more computationally efficient and more suitable to scale up for multiple agent scenarios. Our main contribution here is to write the reactive potential field based motion controller as a hybrid automaton, and then formally verify its safety using differential dynamic logic. In particular, we can guarantee a passive safety property, which means that collisions cannot occur if the robot is to blame, namely a collision can occur only if the robot is at rest. The proposed controller and verification results are demonstrated via simulations and implementation on a Pioneer P3-AT robot.