 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Based Multi-layer K-means++ for Sensory Pattern Analysis in Constrained Spaces
Sep 21, 2020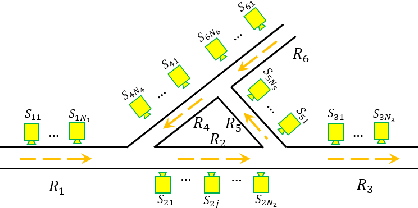

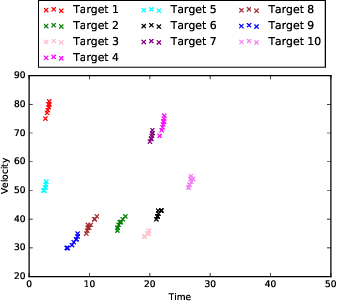
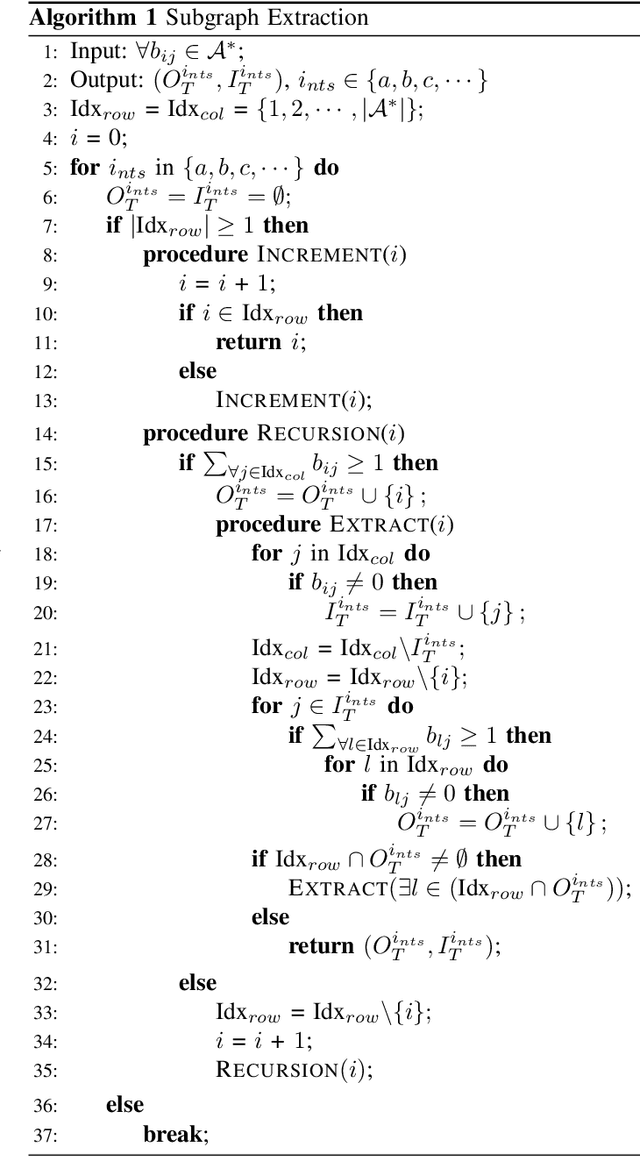
In this paper, we focus on developing a novel unsupervised machine learning algorithm, named graph based multi-layer k-means++ (G-MLKM), to solve data-target association problem when targets move on a constrained space and minimal information of the targets can be obtained by sensors. Instead of employing the traditional data-target association methods that are based on statistical probabilities, the G-MLKM solves the problem via data clustering. We first will develop the Multi-layer K-means++ (MLKM) method for data-target association at local space given a simplified constrained space situation. Then a p-dual graph is proposed to represent the general constrained space when local spaces are interconnected. Based on the dual graph and graph theory, we then generalize MLKM to G-MLKM by first understanding local data-target association and then extracting cross-local data-target association mathematically analyze the data association at intersections of that space. To exclude potential data-target association errors that disobey physical rules, we also develop error correction mechanisms to further improve the accuracy. Numerous simulation examples are conducted to demonstrate the performance of G-MLKM.
A Multi-Layer K-means Approach for Multi-Sensor Data Pattern Recognition in Multi-Target Localization
May 30, 2017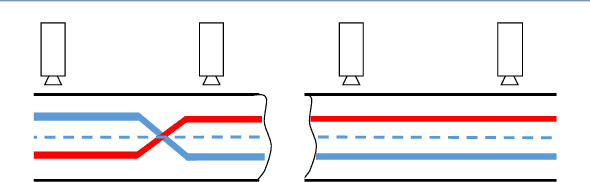
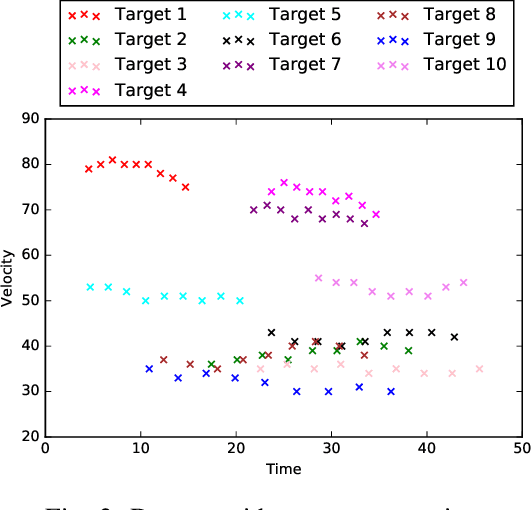
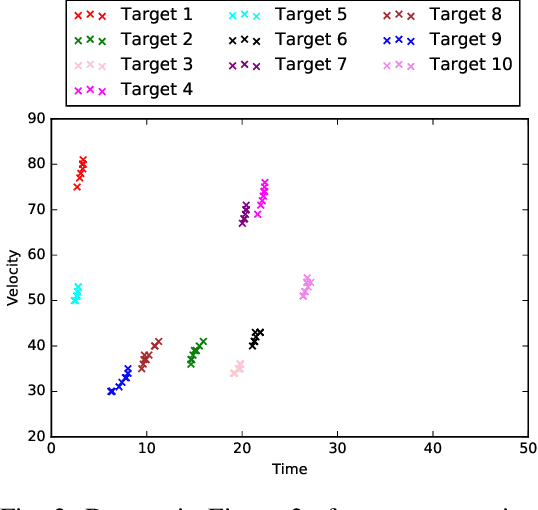
Data-target association is an important step in multi-target localization for the intelligent operation of un- manned systems in numerous applications such as search and rescue, traffic management and surveillance. The objective of this paper is to present an innovative data association learning approach named multi-layer K-means (MLKM) based on leveraging the advantages of some existing machine learning approaches, including K-means, K-means++, and deep neural networks. To enable the accurate data association from different sensors for efficient target localization, MLKM relies on the clustering capabilities of K-means++ structured in a multi-layer framework with the error correction feature that is motivated by the backpropogation that is well-known in deep learning research. To show the effectiveness of the MLKM method, numerous simulation examples are conducted to compare its performance with K-means, K-means++, and deep neural networks.
Multi-Objective Cooperative Search of Spatially Diverse Routes in Uncertain Environments
Mar 15, 2017



This paper focuses on developing new navigation and reconnaissance capabilities for cooperative unmanned systems in uncertain environments. The goal is to design a cooperative multi-vehicle system that can survey an unknown environment and find the most valuable route for personnel to travel. To accomplish the goal, the multi-vehicle system first explores spatially diverse routes and then selects the safest route. In particular, the proposed cooperative path planner sequentially generates a set of spatially diverse routes according to a number of factors, including travel distance, ease of travel, and uncertainty associated with the ease of travel. The planner's dependence on each of these factors is altered by a weighted score, doing so changes the criteria for determining an optimum route. To penalize the selection of same paths by different vehicles, a control gain is used to increase the cost of paths that lie near the route(s) assigned to other vehicles. By varying the control gain, the spatial diversity among routes can be accomplished. By repeatedly searching for different paths cooperatively, an optimal path can be selected that yields the most valuable route.
Multi-Sensor Data Pattern Recognition for Multi-Target Localization: A Machine Learning Approach
Feb 28, 2017



Data-target pairing is an important step towards multi-target localization for the intelligent operation of unmanned systems. Target localization plays a crucial role in numerous applications, such as search, and rescue missions, traffic management and surveillance. The objective of this paper is to present an innovative target location learning approach, where numerous machine learning approaches, including K-means clustering and supported vector machines (SVM), are used to learn the data pattern across a list of spatially distributed sensors. To enable the accurate data association from different sensors for accurate target localization, appropriate data pre-processing is essential, which is then followed by the application of different machine learning algorithms to appropriately group data from different sensors for the accurate localization of multiple targets. Through simulation examples, the performance of these machine learning algorithms is quantified and compared.