 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombined Top-Down and Bottom-Up Approaches to Performance-guaranteed Integrated Task and Motion Planning of Cooperative Multi-agent Systems
Paper and Code
Dec 15, 2016
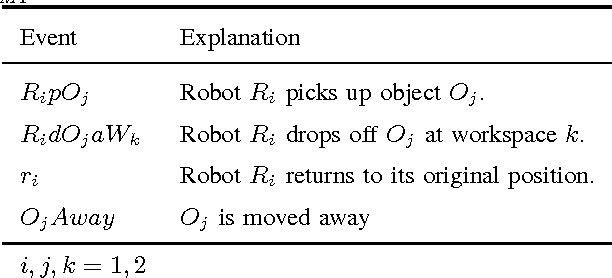

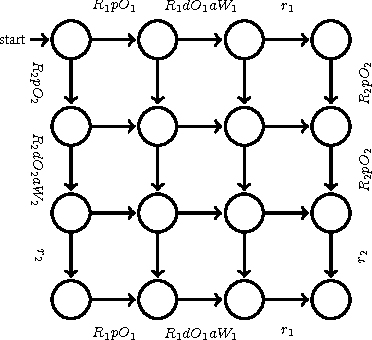
We propose a hierarchical design framework to automatically synthesize coordination schemes and control policies for cooperative multi-agent systems to fulfill formal performance requirements, by associating a bottom-up reactive motion controller with a top-down mission plan. On one hand, starting from a global mission that is specified as a regular language over all the agents' mission capabilities, a mission planning layer sits on the top of the proposed framework, decomposing the global mission into local tasks that are in consistency with each agent's individual capabilities, and compositionally justifying whether the achievement of local tasks implies the satisfaction of the global mission via an assume-guarantee paradigm. On the other hand, bottom-up motion plans associated with each agent are synthesized corresponding to the obtained local missions by composing basic motion primitives, which are verified safe by differential dynamic logic (d$\mathcal{L}$), through a Satisfiability Modulo Theories (SMT) solver that searches feasible solutions in face of constraints imposed by local task requirements and the environment description. It is shown that the proposed framework can handle dynamical environments as the motion primitives possess reactive features, making the motion plans adaptive to local environmental changes. Furthermore, on-line mission reconfiguration can be triggered by the motion planning layer once no feasible solutions can be found through the SMT solver. The effectiveness of the overall design framework is validated by an automated warehouse case study.