 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMA-RAG: Multi-Agent Retrieval-Augmented Generation via Collaborative Chain-of-Thought Reasoning
May 26, 2025

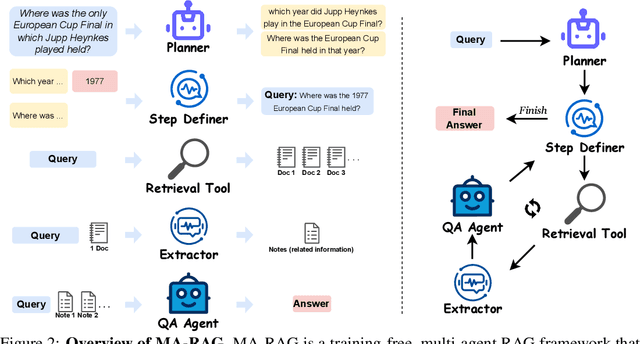

We present MA-RAG, a Multi-Agent framework for Retrieval-Augmented Generation (RAG) that addresses the inherent ambiguities and reasoning challenges in complex information-seeking tasks. Unlike conventional RAG methods that rely on either end-to-end fine-tuning or isolated component enhancements, MA-RAG orchestrates a collaborative set of specialized AI agents: Planner, Step Definer, Extractor, and QA Agents, to tackle each stage of the RAG pipeline with task-aware reasoning. Ambiguities may arise from underspecified queries, sparse or indirect evidence in retrieved documents, or the need to integrate information scattered across multiple sources. MA-RAG mitigates these challenges by decomposing the problem into subtasks, such as query disambiguation, evidence extraction, and answer synthesis, and dispatching them to dedicated agents equipped with chain-of-thought prompting. These agents communicate intermediate reasoning and progressively refine the retrieval and synthesis process. Our design allows fine-grained control over information flow without any model fine-tuning. Crucially, agents are invoked on demand, enabling a dynamic and efficient workflow that avoids unnecessary computation. This modular and reasoning-driven architecture enables MA-RAG to deliver robust, interpretable results. Experiments on multi-hop and ambiguous QA benchmarks demonstrate that MA-RAG outperforms state-of-the-art training-free baselines and rivals fine-tuned systems, validating the effectiveness of collaborative agent-based reasoning in RAG.
SemiKong: Curating, Training, and Evaluating A Semiconductor Industry-Specific Large Language Model
Nov 22, 2024



Large Language Models (LLMs) have demonstrated the potential to address some issues within the semiconductor industry. However, they are often general-purpose models that lack the specialized knowledge needed to tackle the unique challenges of this sector, such as the intricate physics and chemistry of semiconductor devices and processes. SemiKong, the first industry-specific LLM for the semiconductor domain, provides a foundation that can be used to develop tailored proprietary models. With SemiKong 1.0, we aim to develop a foundational model capable of understanding etching problems at an expert level. Our key contributions include (a) curating a comprehensive corpus of semiconductor-related texts, (b) creating a foundational model with in-depth semiconductor knowledge, and (c) introducing a framework for integrating expert knowledge, thereby advancing the evaluation process of domain-specific AI models. Through fine-tuning a pre-trained LLM using our curated dataset, we have shown that SemiKong outperforms larger, general-purpose LLMs in various semiconductor manufacturing and design tasks. Our extensive experiments underscore the importance of developing domain-specific LLMs as a foundation for company- or tool-specific proprietary models, paving the way for further research and applications in the semiconductor domain. Code and dataset will be available at https://github.com/aitomatic/semikong
MP-PINN: A Multi-Phase Physics-Informed Neural Network for Epidemic Forecasting
Nov 11, 2024Forecasting temporal processes such as virus spreading in epidemics often requires more than just observed time-series data, especially at the beginning of a wave when data is limited. Traditional methods employ mechanistic models like the SIR family, which make strong assumptions about the underlying spreading process, often represented as a small set of compact differential equations. Data-driven methods such as deep neural networks make no such assumptions and can capture the generative process in more detail, but fail in long-term forecasting due to data limitations. We propose a new hybrid method called MP-PINN (Multi-Phase Physics-Informed Neural Network) to overcome the limitations of these two major approaches. MP-PINN instils the spreading mechanism into a neural network, enabling the mechanism to update in phases over time, reflecting the dynamics of the epidemics due to policy interventions. Experiments on COVID-19 waves demonstrate that MP-PINN achieves superior performance over pure data-driven or model-driven approaches for both short-term and long-term forecasting.
Reward-RAG: Enhancing RAG with Reward Driven Supervision
Oct 03, 2024



In this paper, we introduce Reward-RAG, a novel approach designed to enhance the Retrieval-Augmented Generation (RAG) model through Reward-Driven Supervision. Unlike previous RAG methodologies, which focus on training language models (LMs) to utilize external knowledge retrieved from external sources, our method adapts retrieval information to specific domains by employing CriticGPT to train a dedicated reward model. This reward model generates synthesized datasets for fine-tuning the RAG encoder, aligning its outputs more closely with human preferences. The versatility of our approach allows it to be effectively applied across various domains through domain-specific fine-tuning. We evaluate Reward-RAG on publicly available benchmarks from multiple domains, comparing it to state-of-the-art methods. Our experimental results demonstrate significant improvements in performance, highlighting the effectiveness of Reward-RAG in improving the relevance and quality of generated responses. These findings underscore the potential of integrating reward models with RAG to achieve superior outcomes in natural language generation tasks.
Spatially temporally distributed informative path planning for multi-robot systems
Mar 25, 2024This paper investigates the problem of informative path planning for a mobile robotic sensor network in spatially temporally distributed mapping. The robots are able to gather noisy measurements from an area of interest during their movements to build a Gaussian Process (GP) model of a spatio-temporal field. The model is then utilized to predict the spatio-temporal phenomenon at different points of interest. To spatially and temporally navigate the group of robots so that they can optimally acquire maximal information gains while their connectivity is preserved, we propose a novel multistep prediction informative path planning optimization strategy employing our newly defined local cost functions. By using the dual decomposition method, it is feasible and practical to effectively solve the optimization problem in a distributed manner. The proposed method was validated through synthetic experiments utilizing real-world data sets.
Vector Learning for Cross Domain Representations
Sep 27, 2018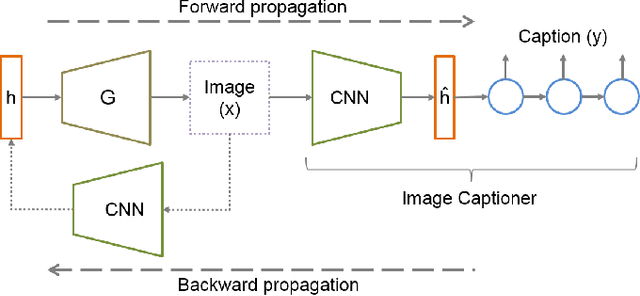
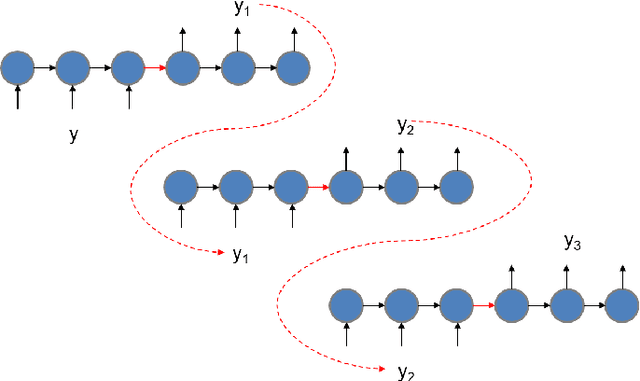
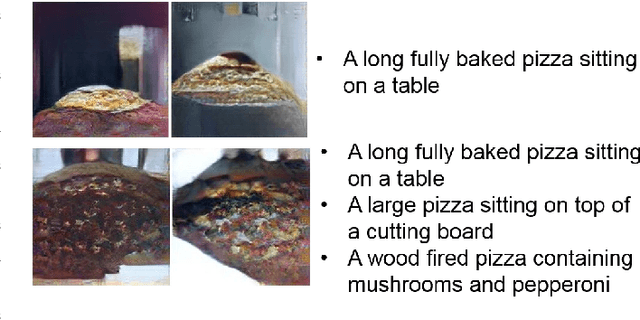
Recently, generative adversarial networks have gained a lot of popularity for image generation tasks. However, such models are associated with complex learning mechanisms and demand very large relevant datasets. This work borrows concepts from image and video captioning models to form an image generative framework. The model is trained in a similar fashion as recurrent captioning model and uses the learned weights for image generation. This is done in an inverse direction, where the input is a caption and the output is an image. The vector representation of the sentence and frames are extracted from an encoder-decoder model which is initially trained on similar sentence and image pairs. Our model conditions image generation on a natural language caption. We leverage a sequence-to-sequence model to generate synthetic captions that have the same meaning for having a robust image generation. One key advantage of our method is that the traditional image captioning datasets can be used for synthetic sentence paraphrases. Results indicate that images generated through multiple captions are better at capturing the semantic meaning of the family of captions.
Batch-normalized Recurrent Highway Networks
Sep 26, 2018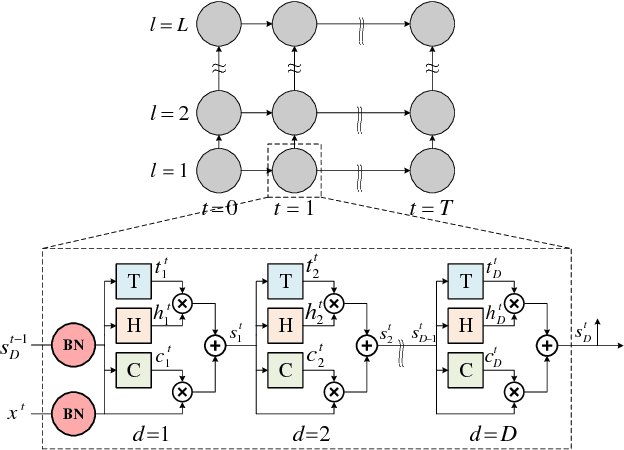
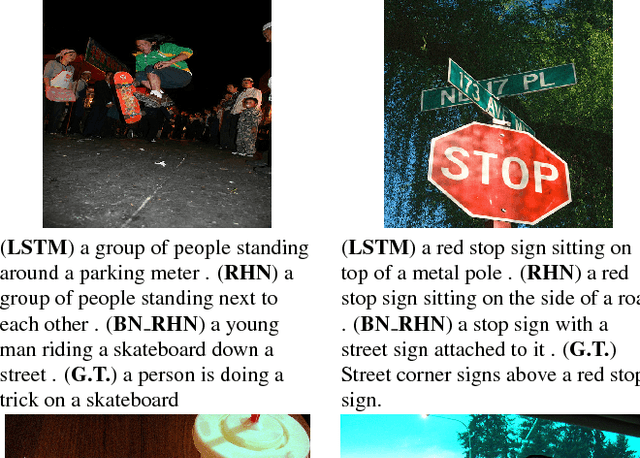
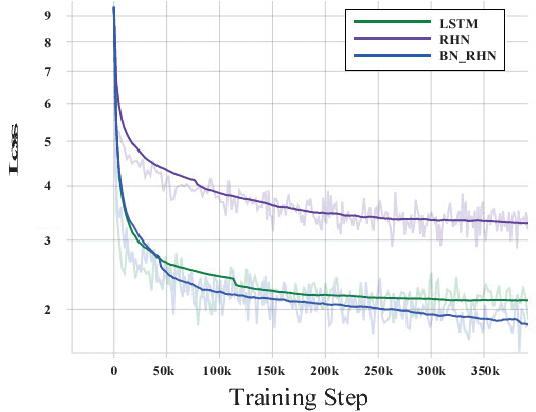
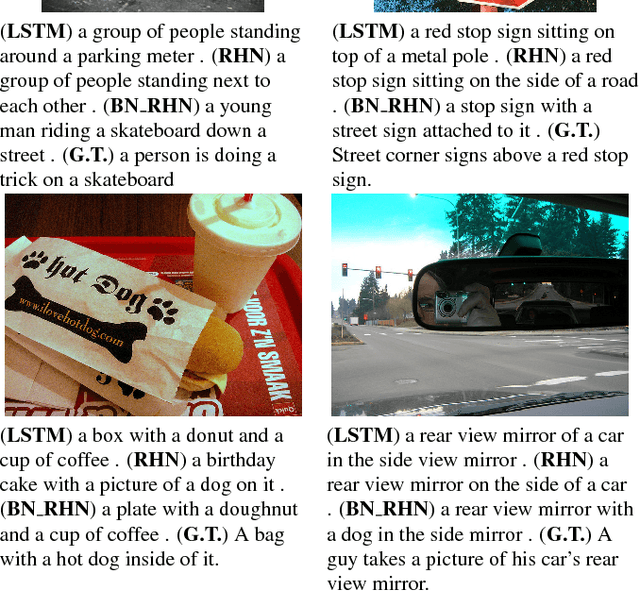
Gradient control plays an important role in feed-forward networks applied to various computer vision tasks. Previous work has shown that Recurrent Highway Networks minimize the problem of vanishing or exploding gradients. They achieve this by setting the eigenvalues of the temporal Jacobian to 1 across the time steps. In this work, batch normalized recurrent highway networks are proposed to control the gradient flow in an improved way for network convergence. Specifically, the introduced model can be formed by batch normalizing the inputs at each recurrence loop. The proposed model is tested on an image captioning task using MSCOCO dataset. Experimental results indicate that the batch normalized recurrent highway networks converge faster and performs better compared with the traditional LSTM and RHN based models.
Semantic Sentence Embeddings for Paraphrasing and Text Summarization
Sep 26, 2018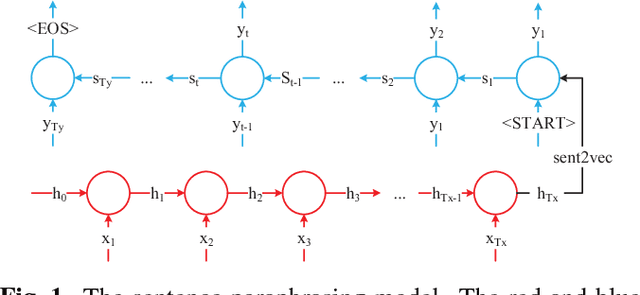
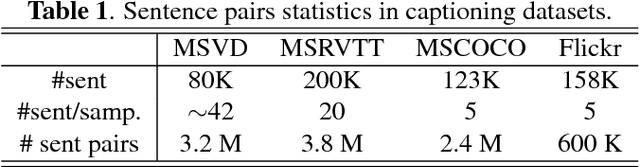
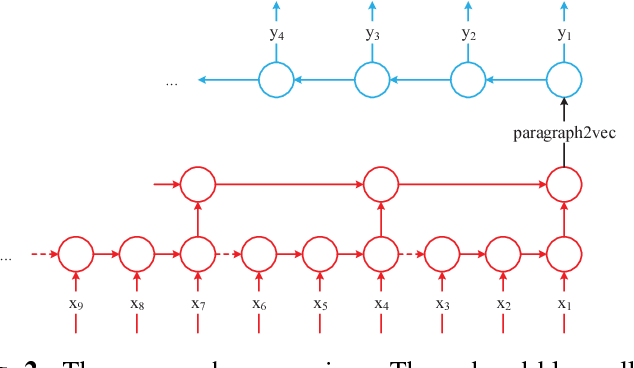
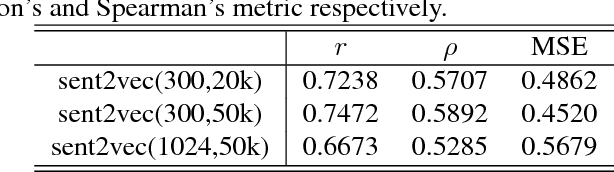
This paper introduces a sentence to vector encoding framework suitable for advanced natural language processing. Our latent representation is shown to encode sentences with common semantic information with similar vector representations. The vector representation is extracted from an encoder-decoder model which is trained on sentence paraphrase pairs. We demonstrate the application of the sentence representations for two different tasks -- sentence paraphrasing and paragraph summarization, making it attractive for commonly used recurrent frameworks that process text. Experimental results help gain insight how vector representations are suitable for advanced language embedding.
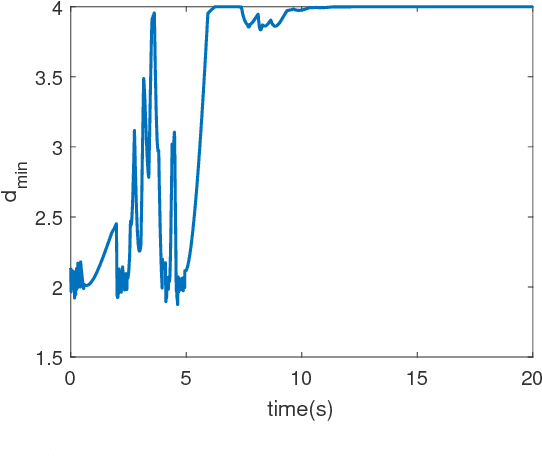
Bounded Distributed Flocking Control of Nonholonomic Mobile Robots
May 11, 2017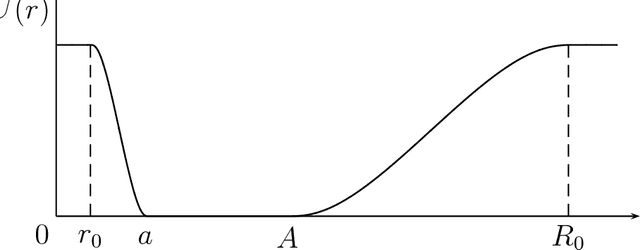
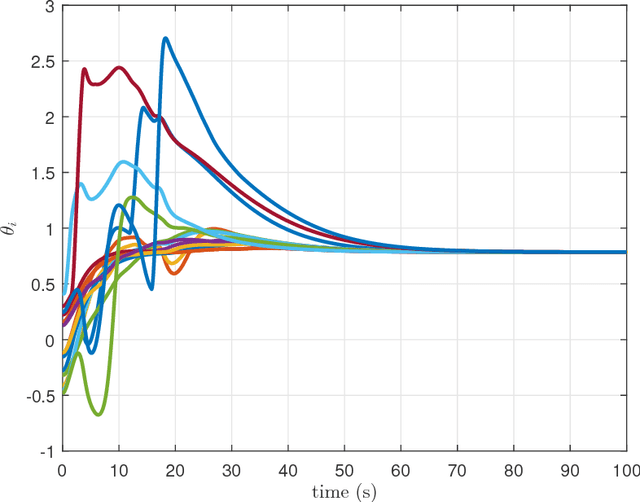
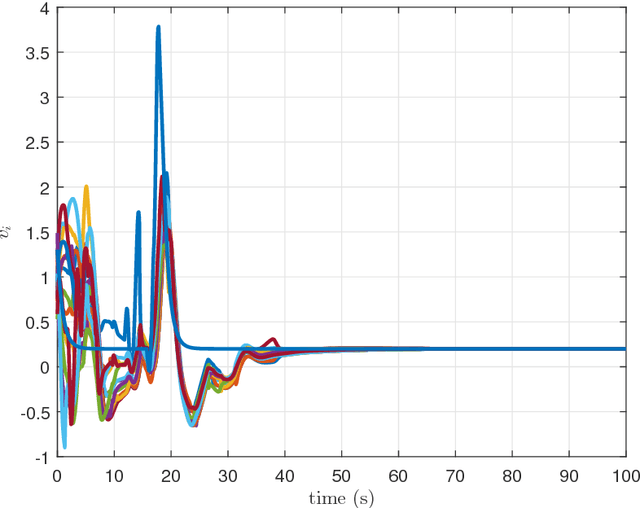
There have been numerous studies on the problem of flocking control for multiagent systems whose simplified models are presented in terms of point-mass elements. Meanwhile, full dynamic models pose some challenging problems in addressing the flocking control problem of mobile robots due to their nonholonomic dynamic properties. Taking practical constraints into consideration, we propose a novel approach to distributed flocking control of nonholonomic mobile robots by bounded feedback. The flocking control objectives consist of velocity consensus, collision avoidance, and cohesion maintenance among mobile robots. A flocking control protocol which is based on the information of neighbor mobile robots is constructed. The theoretical analysis is conducted with the help of a Lyapunov-like function and graph theory. Simulation results are shown to demonstrate the efficacy of the proposed distributed flocking control scheme.
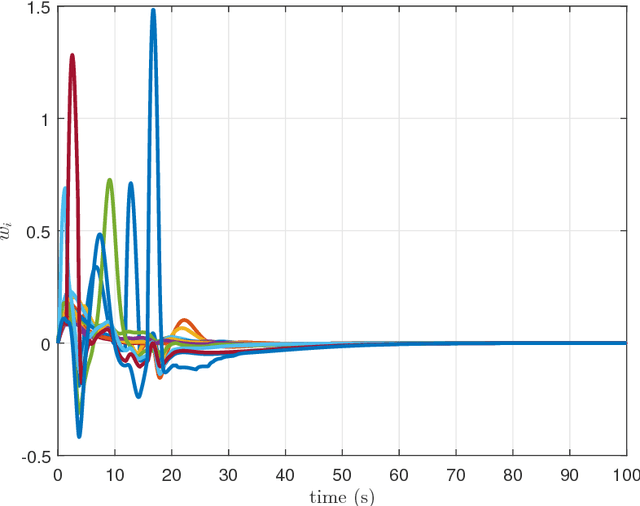
Distributed Formation Control of Nonlonolomic Mobile Robots by Bounded Feedback in the Presence of Obstacles
May 09, 2017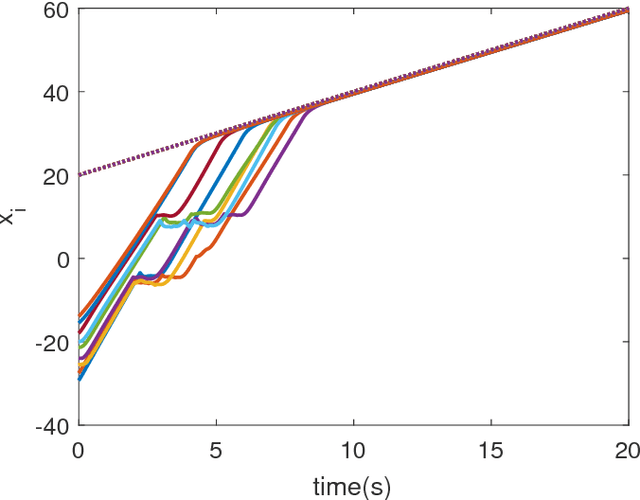
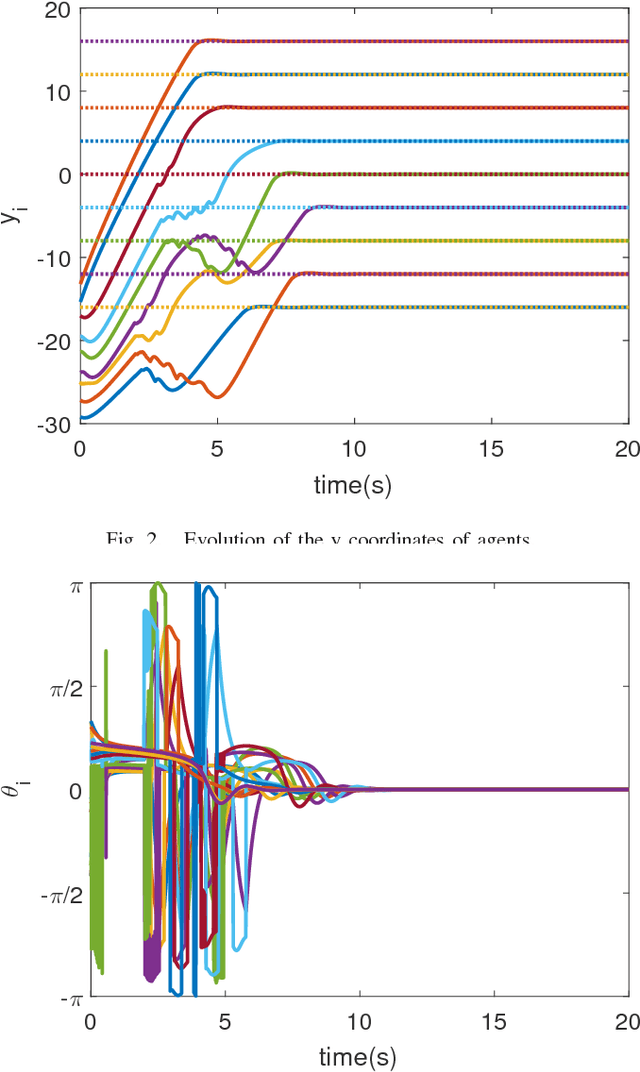
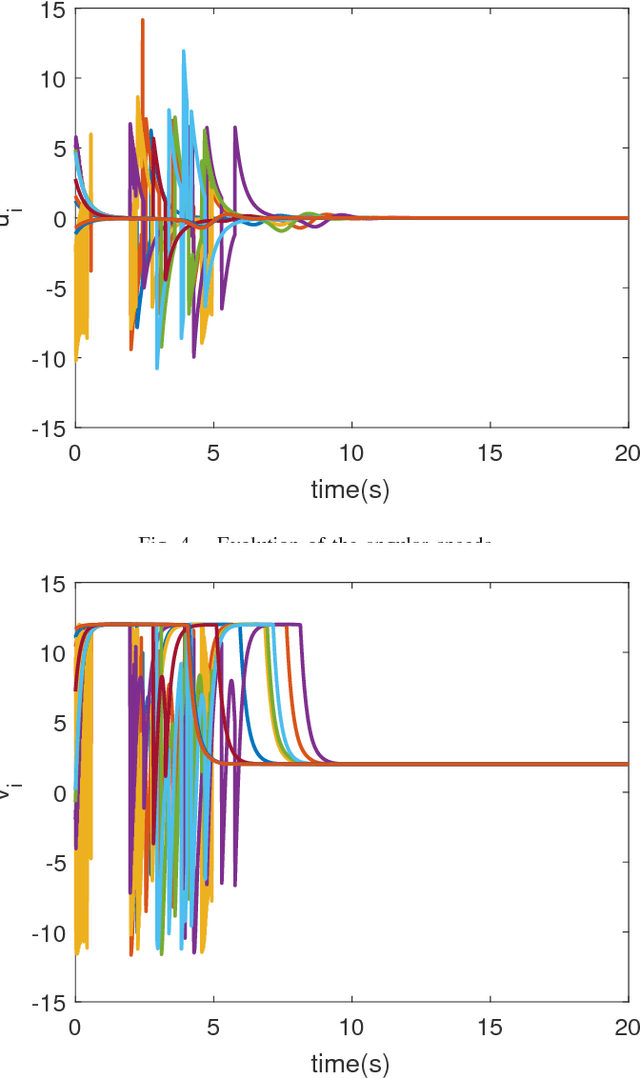
The problem of distributed formation control of nonholonomic mobile robots is addressed in this paper, in which the robots are designed to track a formation. Collision avoidance among agents is guaranteed using a control law based on a repulsive force. In an uncertain environment where obstacles exist, the construction of repulsive force and rotational direction enables agents to avoid and pass the obstacles. The control inputs of each robot are designed to be bounded. Numerical simulations with different formations are implemented to demonstrate the efficacy of the proposed scheme.