Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Formation Control of Nonlonolomic Mobile Robots by Bounded Feedback in the Presence of Obstacles
Paper and Code
May 09, 2017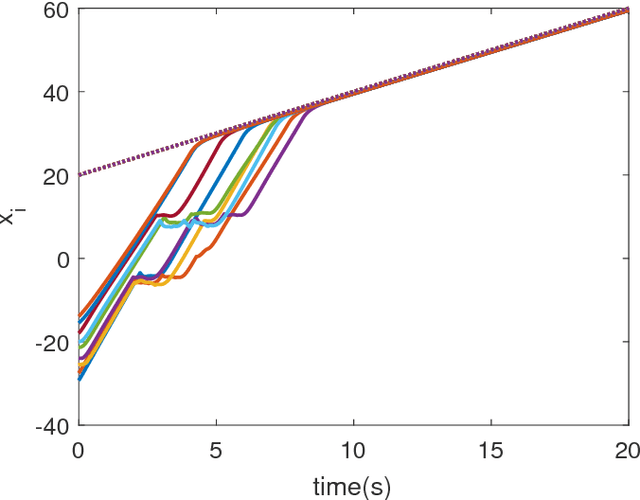
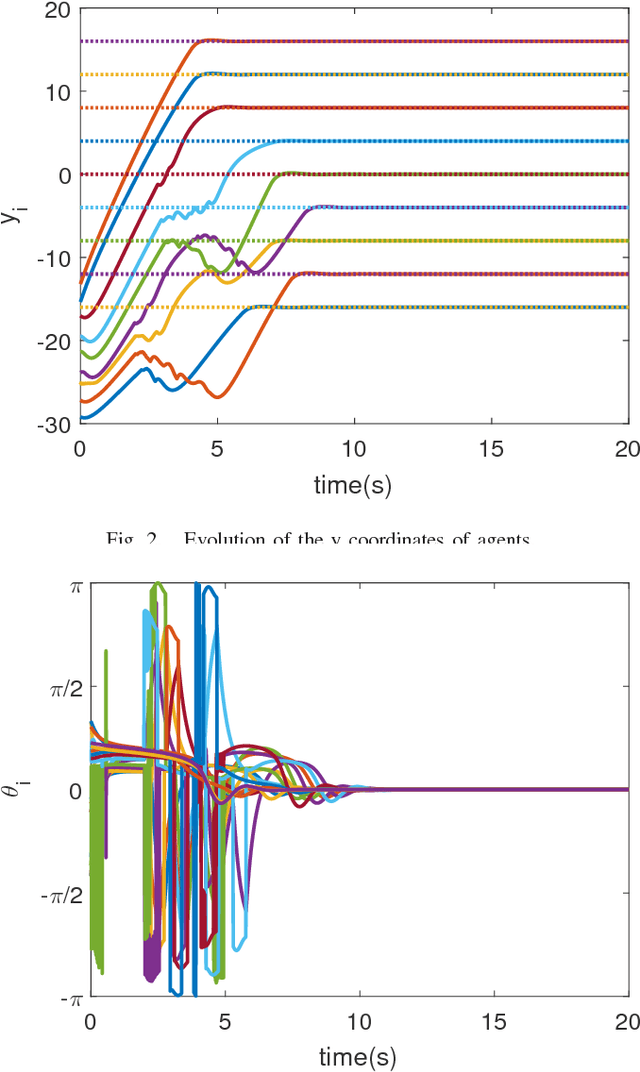
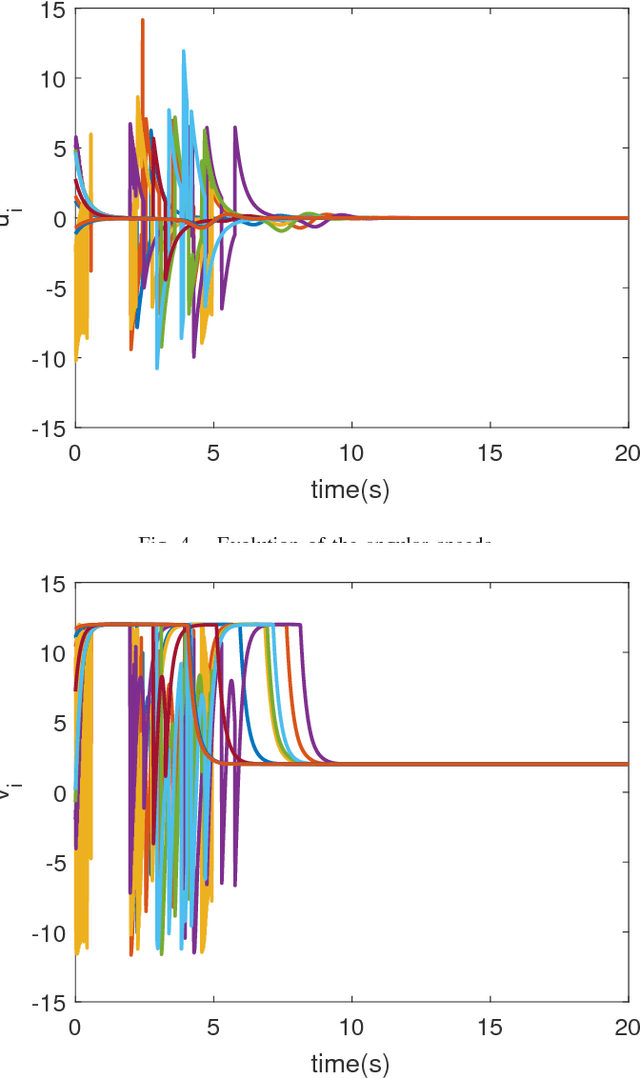
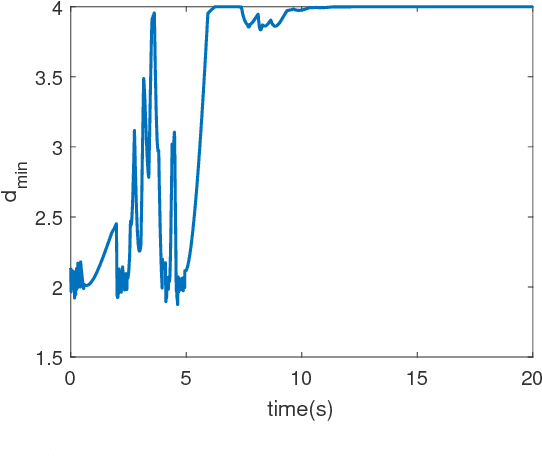
The problem of distributed formation control of nonholonomic mobile robots is addressed in this paper, in which the robots are designed to track a formation. Collision avoidance among agents is guaranteed using a control law based on a repulsive force. In an uncertain environment where obstacles exist, the construction of repulsive force and rotational direction enables agents to avoid and pass the obstacles. The control inputs of each robot are designed to be bounded. Numerical simulations with different formations are implemented to demonstrate the efficacy of the proposed scheme.
View paper on