 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Zoning of Industrial Environments with Autonomous Mobile Robots
Nov 11, 2024

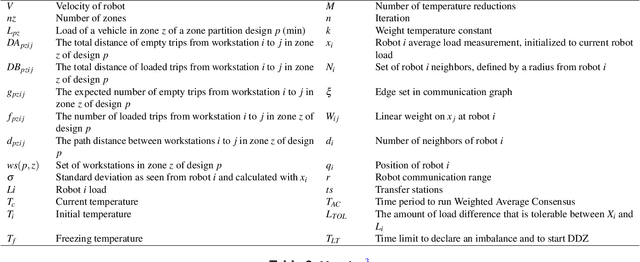
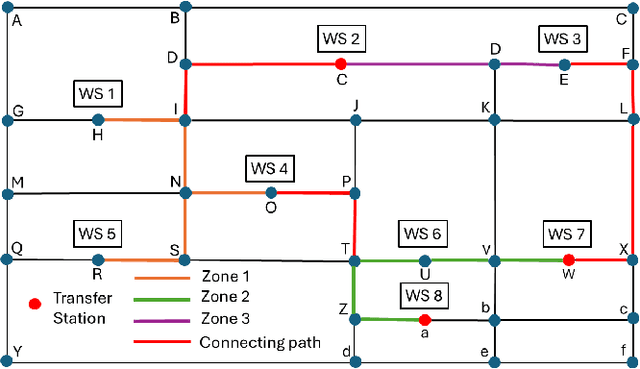
This paper presents a scheduling algorithm that divides a manufacturing/warehouse floor into zones that an Autonomous Mobile Robot (AMR) will occupy and complete part pick-up and drop-off tasks. Each zone is balanced so that each AMR will share each task equally. These zones change over time to accommodate fluctuations in production and to avoid overloading an AMR with tasks. A decentralized dynamic zoning (DDZ) algorithm is introduced to find the optimal zone design, eliminating the possibility of single-point failure from a centralized unit. Then a simulation is built comparing the adaptability of DDZ and other dynamic zoning algorithms from previous works. Initial results show that DDZ has a much lower throughput than other dynamic zoning algorithms but DDZ can achieve a better distribution of tasks. Initial results show that DDZ had a lower standard deviation of AMR total travel distance which was 2874.7 feet less than previous works. This 68.7\% decrease in standard deviation suggests that AMRs under DDZ travel a similar distance during production. This could be useful for real-world applications by making it easier to design charging and maintenance schedules without much downtime. Video demonstration of the system working can be seen here: \url{https://youtu.be/yVi026oVD7U}
Review of Autonomous Mobile Robots for the Warehouse Environment
Jun 12, 2024Autonomous mobile robots (AMRs) have been a rapidly expanding research topic for the past decade. Unlike their counterpart, the automated guided vehicle (AGV), AMRs can make decisions and do not need any previously installed infrastructure to navigate. Recent technological developments in hardware and software have made them more feasible, especially in warehouse environments. Traditionally, most wasted warehouse expenses come from the logistics of moving material from one point to another, and is exhaustive for humans to continuously walk those distances while carrying a load. Here, AMRs can help by working with humans to cut down the time and effort of these repetitive tasks, improving performance and reducing the fatigue of their human collaborators. This literature review covers the recent developments in AMR technology including hardware, robotic control, and system control. This paper also discusses examples of current AMR producers, their robots, and the software that is used to control them. We conclude with future research topics and where we see AMRs developing in the warehouse environment.