 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU Acceleration of Sparse Neural Networks
May 09, 2020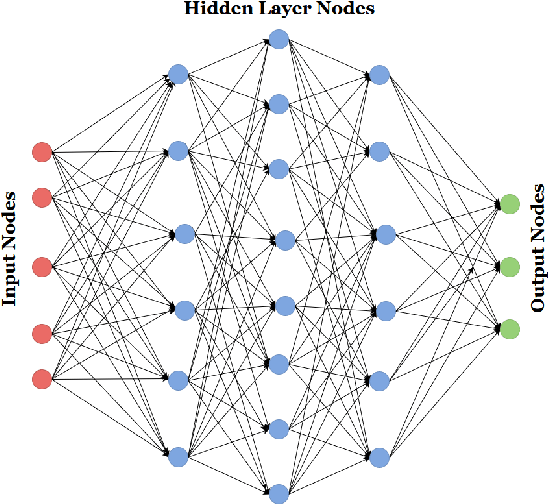
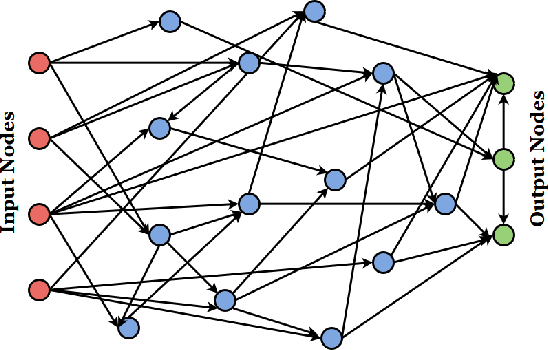
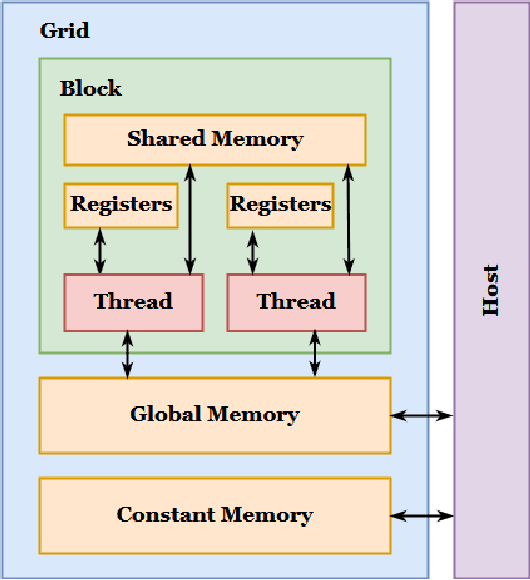
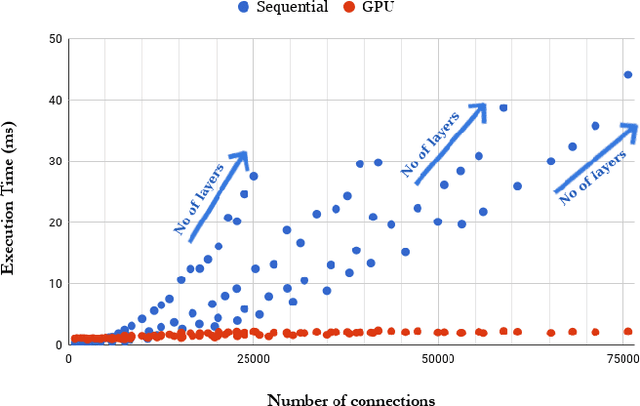
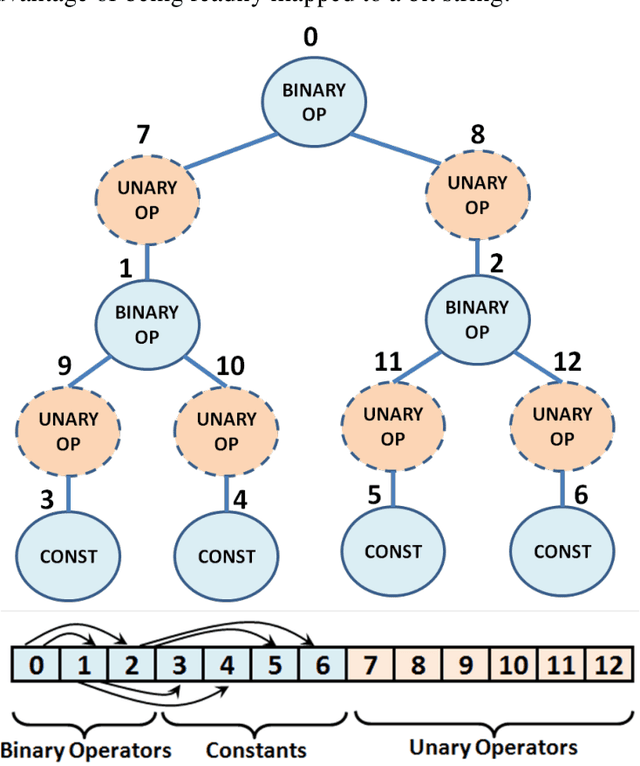
In this paper, we use graphics processing units(GPU) to accelerate sparse and arbitrary structured neural networks. Sparse networks have nodes in the network that are not fully connected with nodes in preceding and following layers, and arbitrary structure neural networks have different number of nodes in each layers. Sparse Neural networks with arbitrary structures are generally created in the processes like neural network pruning and evolutionary machine learning strategies. We show that we can gain significant speedup for full activation of such neural networks using graphical processing units. We do a prepossessing step to determine dependency groups for all the nodes in a network, and use that information to guide the progression of activation in the neural network. Then we compute activation for each nodes in its own separate thread in the GPU, which allows for massive parallelization. We use CUDA framework to implement our approach and compare the results of sequential and GPU implementations. Our results show that the activation of sparse neural networks lends very well to GPU acceleration and can help speed up machine learning strategies which generate such networks or other processes that have similar structure.
Lidar-Monocular Visual Odometry with Genetic Algorithm for Parameter Optimization
Mar 05, 2019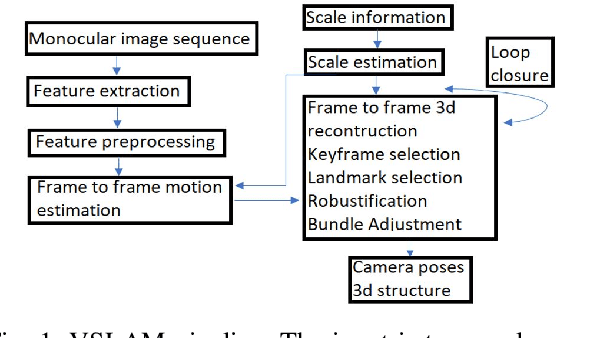

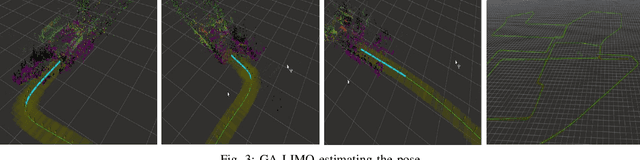

Lidar-Monocular Visual Odometry (LIMO), a odometry estimation algorithm, combines camera and LIght Detection And Ranging sensor (LIDAR) for visual localization by tracking camera features as well as features from LIDAR measurements, and it estimates the motion using Bundle Adjustment based on robust key frames. For rejecting the outliers, LIMO uses semantic labelling and weights of the vegetation landmarks. A drawback of LIMO as well as many other odometry estimation algorithms is that it has many parameters that need to be manually adjusted according to the dynamic changes in the environment in order to decrease the translational errors. In this paper, we present and argue the use of Genetic Algorithm to optimize parameters with reference to LIMO and maximize LIMO's localization and motion estimation performance. We evaluate our approach on the well known KITTI odometry dataset and show that the genetic algorithm helps LIMO to reduce translation error in different datasets.
Co-evolving Real-Time Strategy Game Micro
Mar 27, 2018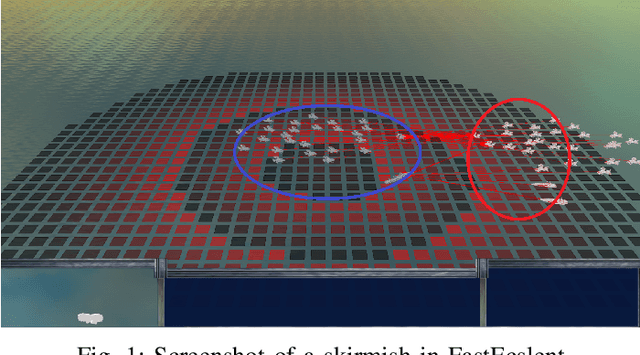
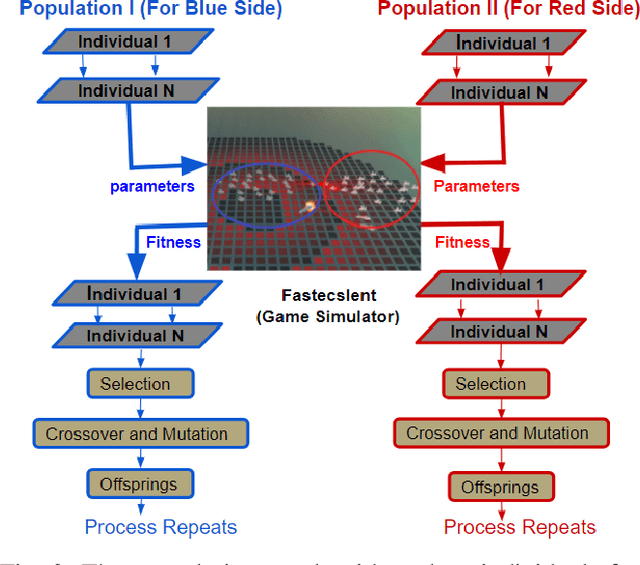
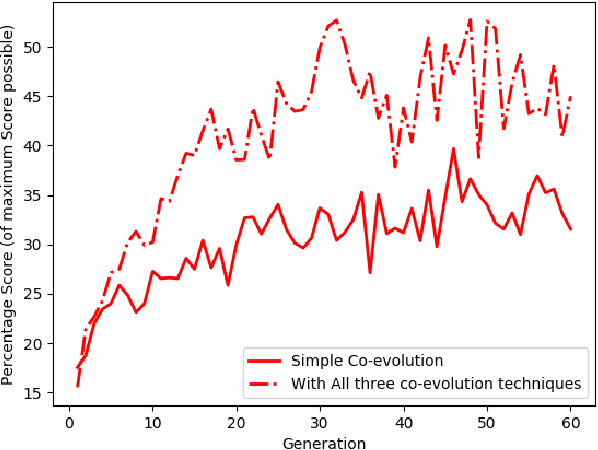
We investigate competitive co-evolution of unit micromanagement in real-time strategy games. Although good long-term macro-strategy and good short-term unit micromanagement both impact real-time strategy games performance, this paper focuses on generating quality micro. Better micro, for example, can help players win skirmishes and battles even when outnumbered. Prior work has shown that we can evolve micro to beat a given opponent. We remove the need for a good opponent to evolve against by using competitive co-evolution to evolve high-quality micro for both sides from scratch. We first co-evolve micro to control a group of ranged units versus a group of melee units. We then move to co-evolve micro for a group of ranged and melee units versus a group of ranged and melee units. Results show that competitive co-evolution produces good quality micro and when combined with the well-known techniques of fitness sharing, shared sampling, and a hall of fame takes less time to produce better quality micro than simple co-evolution. We believe these results indicate the viability of co-evolutionary approaches for generating good unit micro-management.
Multi-objective evolution for 3D RTS Micro
Mar 08, 2018
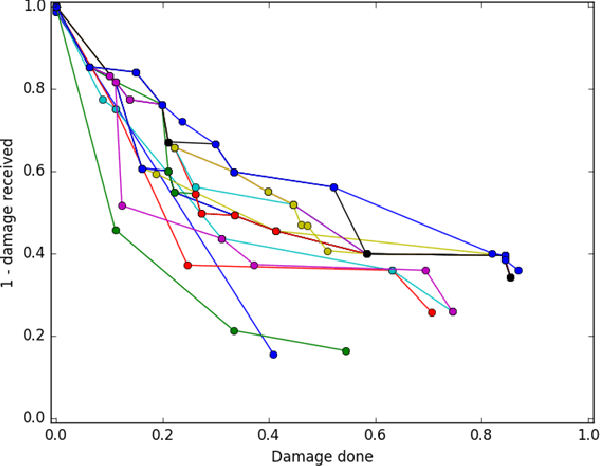


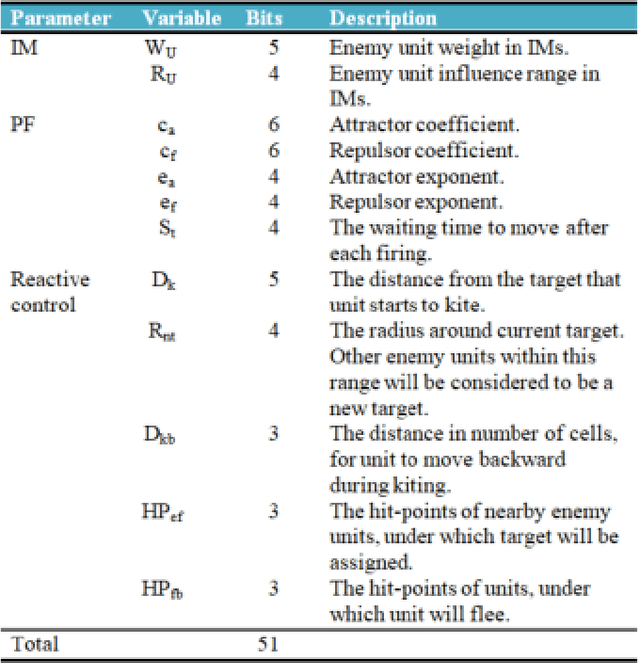
We attack the problem of controlling teams of autonomous units during skirmishes in real-time strategy games. Earlier work had shown promise in evolving control algorithm parameters that lead to high performance team behaviors similar to those favored by good human players in real-time strategy games like Starcraft. This algorithm specifically encoded parameterized kiting and fleeing behaviors and the genetic algorithm evolved these parameter values. In this paper we investigate using influence maps and potential fields alone to compactly represent and control real-time team behavior for entities that can maneuver in three dimensions. A two-objective fitness function that maximizes damage done and minimizes damage taken guides our multi-objective evolutionary algorithm. Preliminary results indicate that evolving friend and enemy unit potential field parameters for distance, weapon characteristics, and entity health suffice to produce complex, high performing, three-dimensional, team tactics.
Collaborative Evolution of 3D Models
Nov 27, 2017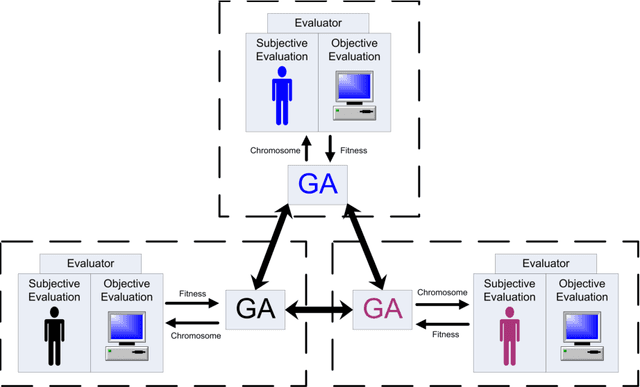
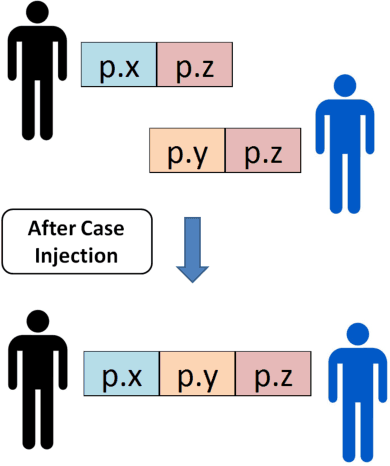
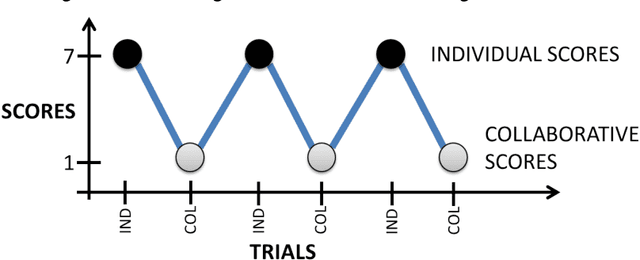
We present a computational model of creative design based on collaborative interactive genetic algorithms. In our model, designers individually guide interactive genetic algorithms (IGAs) to generate and explore potential design solutions quickly. Collaboration is supported by allowing designers to share solutions amongst each other while using IGAs, with the sharing of solutions adding variables to the search space. We present experiments on 3D modeling as a case study, with designers creating model transformations individually and collaboratively. The transformations were evaluated by participants in surveys and results show that individual and collaborative models were considered equally creative. However, the use of our collaborative IGAs model materially changes resulting designs compared to individual IGAs.
* Design Computing and Cognition 2014