 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects
Feb 10, 2024



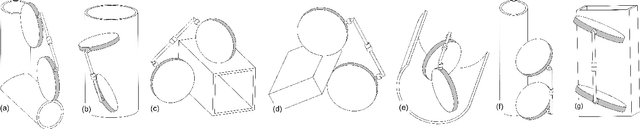
Robotics hand/grippers nowadays are not limited to manufacturing lines; instead, they are widely utilized in cluttered environments, such as restaurants, farms, and warehouses. In such scenarios, they need to deal with high uncertainty of the grasped objects' shapes, postures, surfaces, and material properties, which requires complex integration of sensing and decision-making process. On the other hand, integrating soft materials into the gripper's design may tolerate the above uncertainties and reduce complexity in control. In this paper, we introduce ROSE, a novel soft gripper that can embrace the object and squeeze it by buckling a funnel-liked thin-walled soft membrane around the object by simple rotation of the base. Thanks to this design, ROSE hand can adapt to a wide range of objects that can fit in the funnel and handle with gentle gripping force. Regardless of this, ROSE can generate a high lift force (up to 33kgf) while significantly reducing the normal pressure on the gripped objects. In our experiment, a 198g ROSE can be integrated into a robot arm with a single actuation and successfully lift various types of objects, even after 400,000 trials. The embracing mechanism helps reduce the dependence of friction between the object and the membrane, as ROSE could pick up a chicken egg submerged inside an olive oil tank. We also report a feasible design for equipping the ROSE hand with tactile sensing while appealing to the scalability of the design to fit a wide range of objects. Video: https://youtu.be/E1wAI09LaoY
* 9 pages, 9 figures, RSS2023 conference
Tombo Propeller: Bio-Inspired Deformable Structure toward Collision-Accommodated Control for Drones
Feb 15, 2022There is a growing need for vertical take-off and landing vehicles, including drones, which are safe to use and can adapt to collisions. The risks of damage by collision, to humans, obstacles in the environment, and drones themselves, are significant. This has prompted a search into nature for a highly resilient structure that can inform a design of propellers to reduce those risks and enhance safety. Inspired by the flexibility and resilience of dragonfly wings, we propose a novel design for a biomimetic drone propeller called Tombo propeller. Here, we report on the design and fabrication process of this biomimetic propeller that can accommodate collisions and recover quickly, while maintaining sufficient thrust force to hover and fly. We describe the development of an aerodynamic model and experiments conducted to investigate performance characteristics for various configurations of the propeller morphology, and related properties, such as generated thrust force, thrust force deviation, collision force, recovery time, lift-to-drag ratio, and noise. Finally, we design and showcase a control strategy for a drone equipped with Tombo propellers that collides in mid-air with an obstacle and recovers from collision continuing flying. The results show that the maximum collision force generated by the proposed Tombo propeller is less than two-thirds that of a traditional rigid propeller, which suggests the concrete possibility to employ deformable propellers for drones flying in a cluttered environment. This research can contribute to morphological design of flying vehicles for agile and resilient performance.
Multi-directional Bicycle Robot for Steel Structure Inspection
Mar 27, 2021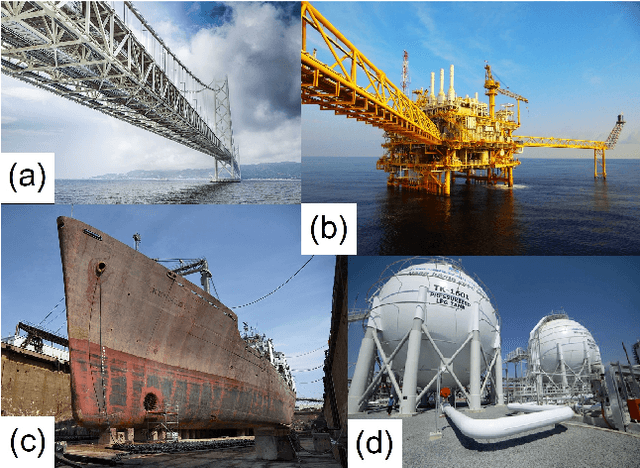

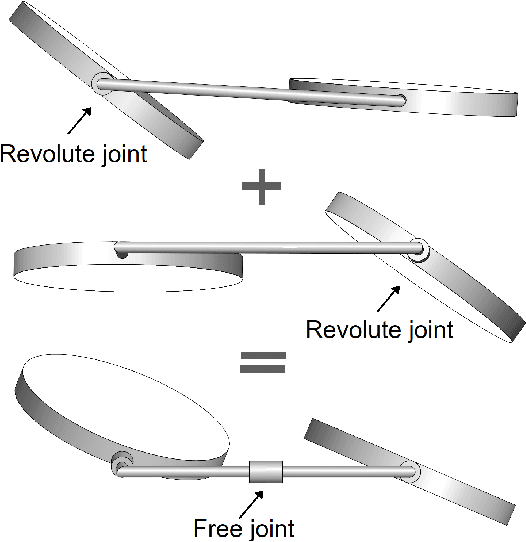
This paper presents a novel design of a multi-directional bicycle robot, which targets inspecting general ferromagnetic structures including complex-shaped structures. The locomotion concept is based on arranging two magnetic wheels in a bicycle-like configuration with two independent steering actuators. This configuration allows the robot to possess multi-directional mobility. An additional free joint helps the robot naturally adapt to non-flat and complex surfaces of steel structures. The robot has the biggest advantage to be mechanically simple with high mobility. Besides, the robot is equipped with sensing tools for structure health monitoring. We demonstrate the deployment of our robot to perform steel rust detection on steel bridges. The final inspection results are visualized as 3D models of the bridges together with marked locations of detected rusty areas.