 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoLoArm: Deformable Arms for Collision-Tolerant Quadrotor Flight
May 25, 2026The increasing use of drones in human-centric applications highlights the need for designs that can survive collisions and recover rapidly, minimizing risks to both humans and the environment. We present HoLoArm, a quadrotor with compliant arms inspired by the nodus structure of dragonfly wings. This design provides natural flexibility and resilience while preserving flight stability, which is further reinforced by the integration of a Reinforcement Learning (RL) control policy that enhances both recovery and hovering performance. Experimental results demonstrate that HoLoArm can passively deform in any direction, including axial one, and recover within 0.3-0.6 s depending on the direction and level of the impact. The drone can survive collisions at speeds up to 7.6 m/s and carry a 540 g payload while maintaining stable flight. This work contributes to the morphological design of soft aerial robots with high agility and reliable safety, enabling operation in cluttered and human shared environments, and lays the groundwork for future fully soft drones that integrate compliant structures with intelligent control.
* 8 pages, 15 figures, 1 table, Accepted at the IEEE Robotics and Automation Letters (RA-L) and the IEEE International Conference on Robotics and Automation (ICRA), 2026
A Distributed Multi-Modal Sensing Approach for Human Activity Recognition in Real-Time Human-Robot Collaboration
Feb 02, 2026Human activity recognition (HAR) is fundamental in human-robot collaboration (HRC), enabling robots to respond to and dynamically adapt to human intentions. This paper introduces a HAR system combining a modular data glove equipped with Inertial Measurement Units and a vision-based tactile sensor to capture hand activities in contact with a robot. We tested our activity recognition approach under different conditions, including offline classification of segmented sequences, real-time classification under static conditions, and a realistic HRC scenario. The experimental results show a high accuracy for all the tasks, suggesting that multiple collaborative settings could benefit from this multi-modal approach.
A Comparative Study of Human Activity Recognition: Motion, Tactile, and multi-modal Approaches
May 13, 2025Human activity recognition (HAR) is essential for effective Human-Robot Collaboration (HRC), enabling robots to interpret and respond to human actions. This study evaluates the ability of a vision-based tactile sensor to classify 15 activities, comparing its performance to an IMU-based data glove. Additionally, we propose a multi-modal framework combining tactile and motion data to leverage their complementary strengths. We examined three approaches: motion-based classification (MBC) using IMU data, tactile-based classification (TBC) with single or dual video streams, and multi-modal classification (MMC) integrating both. Offline validation on segmented datasets assessed each configuration's accuracy under controlled conditions, while online validation on continuous action sequences tested online performance. Results showed the multi-modal approach consistently outperformed single-modality methods, highlighting the potential of integrating tactile and motion sensing to enhance HAR systems for collaborative robotics.
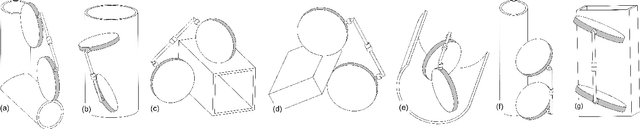
ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects
Feb 10, 2024



Robotics hand/grippers nowadays are not limited to manufacturing lines; instead, they are widely utilized in cluttered environments, such as restaurants, farms, and warehouses. In such scenarios, they need to deal with high uncertainty of the grasped objects' shapes, postures, surfaces, and material properties, which requires complex integration of sensing and decision-making process. On the other hand, integrating soft materials into the gripper's design may tolerate the above uncertainties and reduce complexity in control. In this paper, we introduce ROSE, a novel soft gripper that can embrace the object and squeeze it by buckling a funnel-liked thin-walled soft membrane around the object by simple rotation of the base. Thanks to this design, ROSE hand can adapt to a wide range of objects that can fit in the funnel and handle with gentle gripping force. Regardless of this, ROSE can generate a high lift force (up to 33kgf) while significantly reducing the normal pressure on the gripped objects. In our experiment, a 198g ROSE can be integrated into a robot arm with a single actuation and successfully lift various types of objects, even after 400,000 trials. The embracing mechanism helps reduce the dependence of friction between the object and the membrane, as ROSE could pick up a chicken egg submerged inside an olive oil tank. We also report a feasible design for equipping the ROSE hand with tactile sensing while appealing to the scalability of the design to fit a wide range of objects. Video: https://youtu.be/E1wAI09LaoY
* 9 pages, 9 figures, RSS2023 conference
Soft Robotic Link with Controllable Transparency for Vision-based Tactile and Proximity Sensing
Nov 07, 2022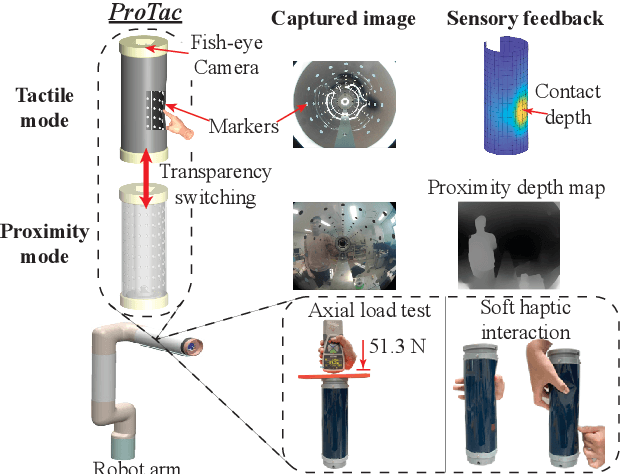
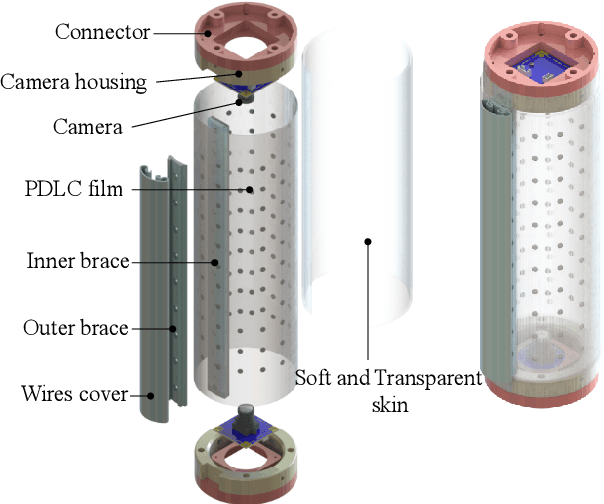
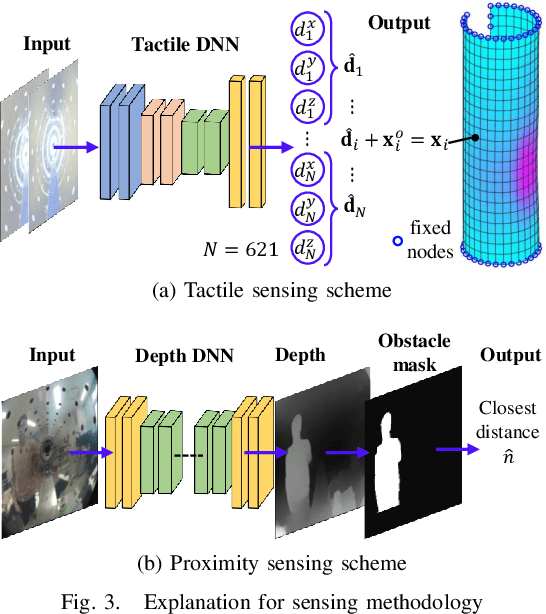

Robots have been brought to work close to humans in many scenarios. For coexistence and collaboration, robots should be safe and pleasant for humans to interact with. To this end, the robots could be both physically soft with multimodal sensing/perception, so that the robots could have better awareness of the surrounding environment, as well as to respond properly to humans' action/intention. This paper introduces a novel soft robotic link, named ProTac, that possesses multiple sensing modes: tactile and proximity sensing, based on computer vision and a functional material. These modalities come from a layered structure of a soft transparent silicon skin, a polymer dispersed liquid crystal (PDLC) film, and reflective markers. Here, the PDLC film can switch actively between the opaque and the transparent state, from which the tactile sensing and proximity sensing can be obtained by using cameras solely built inside the ProTac link. In this paper, inference algorithms for tactile proximity perception are introduced. Evaluation results of two sensing modalities demonstrated that, with a simple activation strategy, ProTac link could effectively perceive useful information from both approaching and in-contact obstacles. The proposed sensing device is expected to bring in ultimate solutions for design of robots with softness, whole-body and multimodal sensing, and safety control strategies.
Tombo Propeller: Bio-Inspired Deformable Structure toward Collision-Accommodated Control for Drones
Feb 15, 2022There is a growing need for vertical take-off and landing vehicles, including drones, which are safe to use and can adapt to collisions. The risks of damage by collision, to humans, obstacles in the environment, and drones themselves, are significant. This has prompted a search into nature for a highly resilient structure that can inform a design of propellers to reduce those risks and enhance safety. Inspired by the flexibility and resilience of dragonfly wings, we propose a novel design for a biomimetic drone propeller called Tombo propeller. Here, we report on the design and fabrication process of this biomimetic propeller that can accommodate collisions and recover quickly, while maintaining sufficient thrust force to hover and fly. We describe the development of an aerodynamic model and experiments conducted to investigate performance characteristics for various configurations of the propeller morphology, and related properties, such as generated thrust force, thrust force deviation, collision force, recovery time, lift-to-drag ratio, and noise. Finally, we design and showcase a control strategy for a drone equipped with Tombo propellers that collides in mid-air with an obstacle and recovers from collision continuing flying. The results show that the maximum collision force generated by the proposed Tombo propeller is less than two-thirds that of a traditional rigid propeller, which suggests the concrete possibility to employ deformable propellers for drones flying in a cluttered environment. This research can contribute to morphological design of flying vehicles for agile and resilient performance.
Multi-directional Bicycle Robot for Steel Structure Inspection
Mar 27, 2021

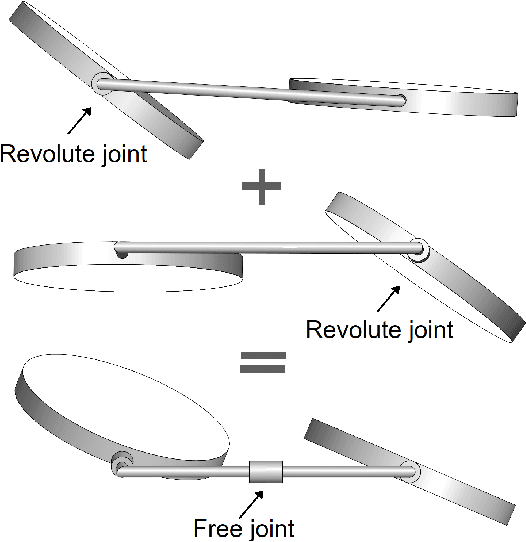
This paper presents a novel design of a multi-directional bicycle robot, which targets inspecting general ferromagnetic structures including complex-shaped structures. The locomotion concept is based on arranging two magnetic wheels in a bicycle-like configuration with two independent steering actuators. This configuration allows the robot to possess multi-directional mobility. An additional free joint helps the robot naturally adapt to non-flat and complex surfaces of steel structures. The robot has the biggest advantage to be mechanically simple with high mobility. Besides, the robot is equipped with sensing tools for structure health monitoring. We demonstrate the deployment of our robot to perform steel rust detection on steel bridges. The final inspection results are visualized as 3D models of the bridges together with marked locations of detected rusty areas.
BPActuators: Lightweight and Low-Cost Soft Actuators by Balloons and Plastics
Mar 05, 2021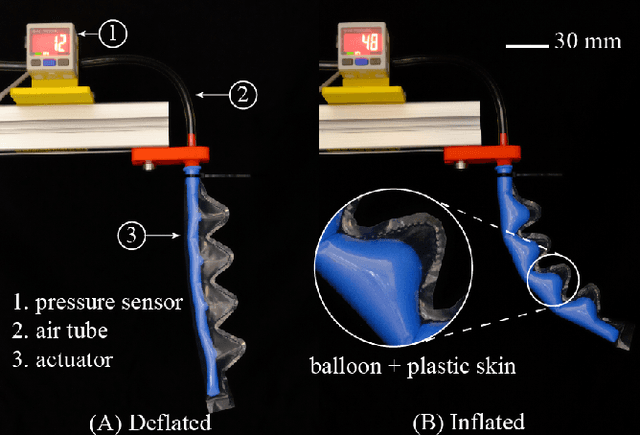
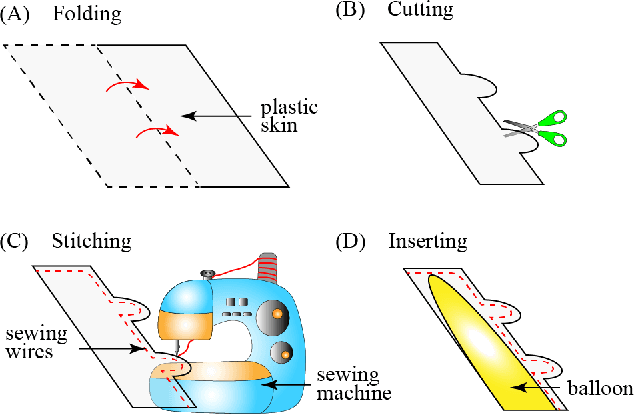
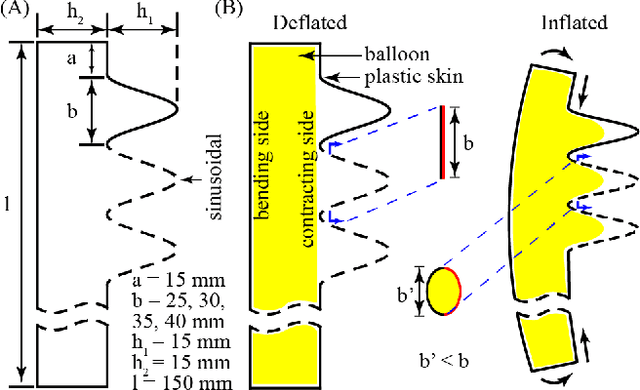
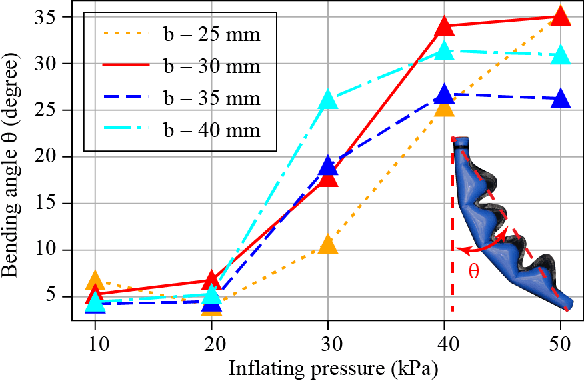
To increase the awareness and impact, soft robotics needs to go beyond the lab environment and should be readily accessible to those even with no robotic expertise. However, most prevailing manufacturing methodologies require either professional equipment or materials that are not usually available to common people, thereby constraining the accessibility of soft robotics. In this communication, we propose a lightweight and low-cost soft bending actuator, called BPActuator, that can be easily fabricated with plastics and balloons. We fabricated a range of actuators with various morphology for characterization in terms of deformation and load-bearing capacity, and demonstrated that they can bend up to 35 degrees and exert force at the tip around 0.070$\pm$0.015N, which is over 5 times higher than their average gravity. We further implemented a gripper with three fingers using the proposed actuators, and found that the gripper can realize human-like grasp of a range of daily objects. The gripper can lift objects at least 8 times heavier than its own weight. Furthermore, the BPActuator is cost effective and each costs about 0.22 USD. Given these advantages, the BPActuators are expected to significantly improve the accessibility of soft robotics to a wider group without robotic expertise.