 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagGlove: A Haptic Glove with Movable Magnetic Force for Manipulation Learning
Jul 27, 2022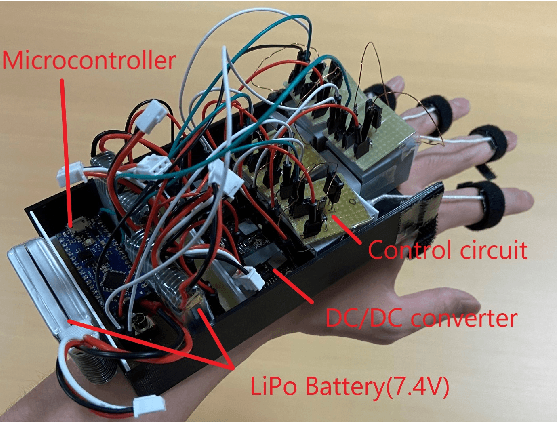
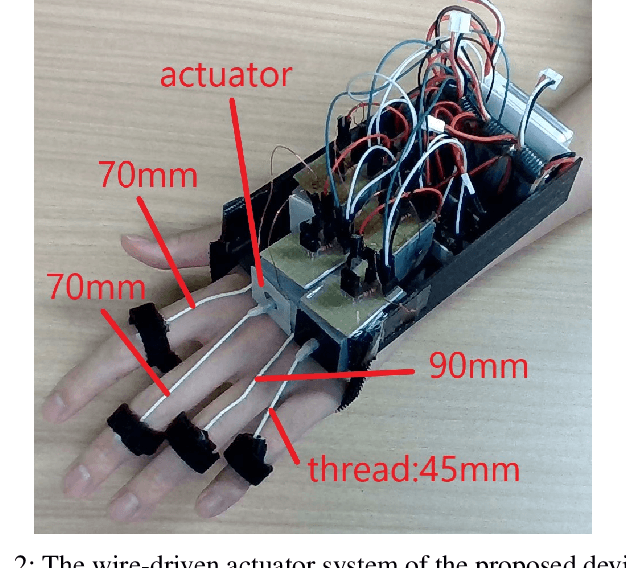
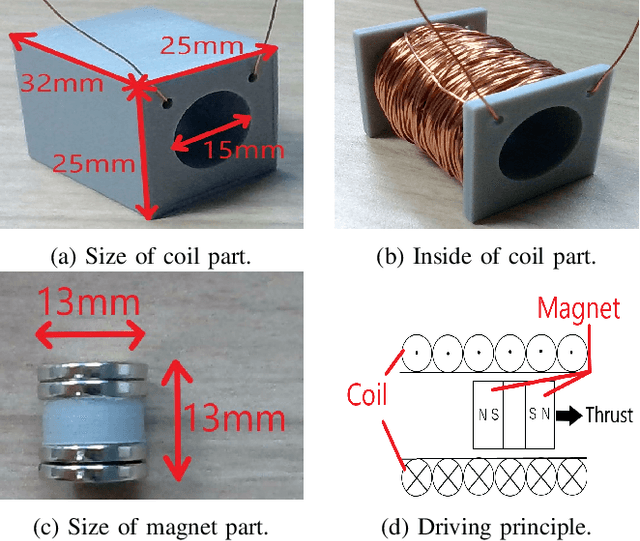
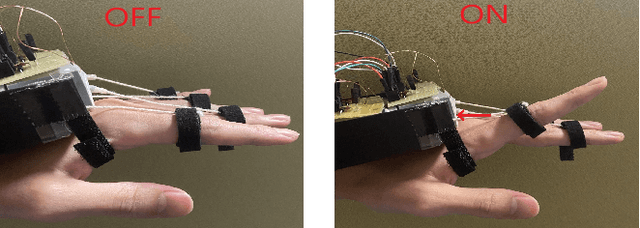
Recently, haptic gloves have been extensively explored for various practical applications, such as manipulation learning. Previous glove devices have different force-driven systems, such as shape memory alloys, servo motors and pneumatic actuators; however, these proposed devices may have difficulty in fast finger movement, easy reproduction, and safety issues. In this study, we propose MagGlove, a novel haptic glove with a movable magnet mechanism that has a linear motor, to solve these issues. The proposed MagGlove device is a compact system on the back of the wearer's hand with high responsiveness, ease of use, and good safety. The proposed device is adaptive with the modification of the magnitude of the current flowing through the coil. Based on our evaluation study, it is verified that the proposed device can achieve finger motion in the given tasks. Therefore, MagGlove can provide flexible support tailored to the wearers' learning levels in manipulation learning tasks.
AugLimb: Compact Robotic Limb for Human Augmentation
Sep 01, 2021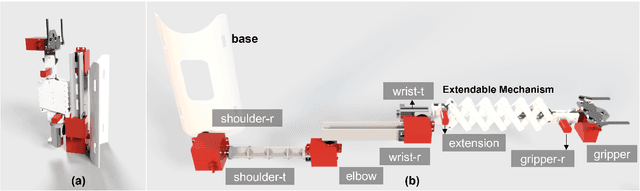
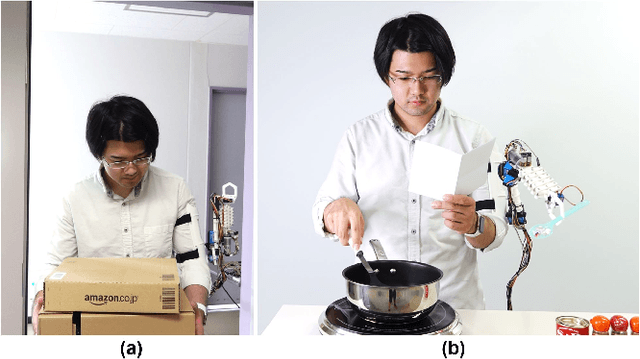
This work proposes a compact robotic limb, AugLimb, that can augment our body functions and support the daily activities. AugLimb adopts the double-layer scissor unit for the extendable mechanism which can achieve 2.5 times longer than the forearm length. The proposed device can be mounted on the user's upper arm, and transform into compact state without obstruction to wearers. The proposed device is lightweight with low burden exerted on the wearer. We developed the prototype of AugLimb to demonstrate the proposed mechanisms. We believe that the design methodology of AugLimb can facilitate human augmentation research for practical use. see http://www.jaist.ac.jp/~xie/auglimb.html
BPActuators: Lightweight and Low-Cost Soft Actuators by Balloons and Plastics
Mar 05, 2021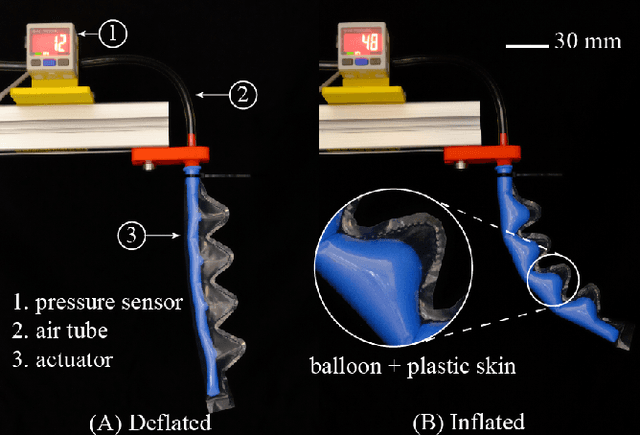
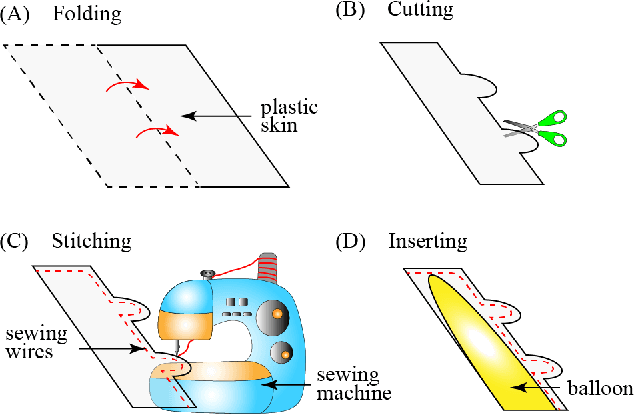
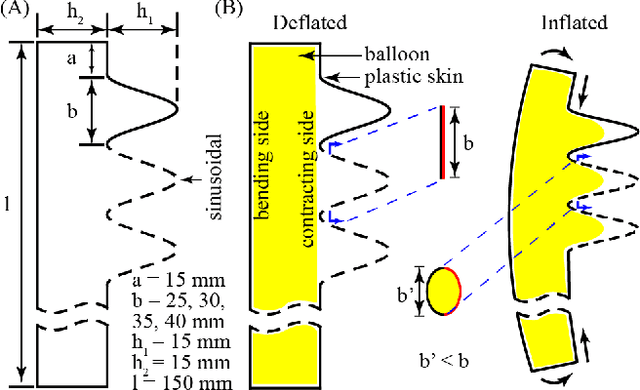
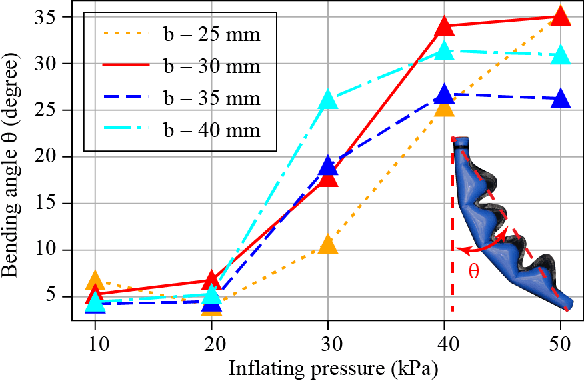
To increase the awareness and impact, soft robotics needs to go beyond the lab environment and should be readily accessible to those even with no robotic expertise. However, most prevailing manufacturing methodologies require either professional equipment or materials that are not usually available to common people, thereby constraining the accessibility of soft robotics. In this communication, we propose a lightweight and low-cost soft bending actuator, called BPActuator, that can be easily fabricated with plastics and balloons. We fabricated a range of actuators with various morphology for characterization in terms of deformation and load-bearing capacity, and demonstrated that they can bend up to 35 degrees and exert force at the tip around 0.070$\pm$0.015N, which is over 5 times higher than their average gravity. We further implemented a gripper with three fingers using the proposed actuators, and found that the gripper can realize human-like grasp of a range of daily objects. The gripper can lift objects at least 8 times heavier than its own weight. Furthermore, the BPActuator is cost effective and each costs about 0.22 USD. Given these advantages, the BPActuators are expected to significantly improve the accessibility of soft robotics to a wider group without robotic expertise.