 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate and Scalable Matrix Mechanisms via Divide and Conquer
Apr 01, 2026Matrix mechanisms are often used to provide unbiased differentially private query answers when publishing statistics or creating synthetic data. Recent work has developed matrix mechanisms, such as ResidualPlanner and Weighted Fourier Factorizations, that scale to high dimensional datasets while providing optimality guarantees for workloads such as marginals and circular product queries. They operate by adding noise to a linearly independent set of queries that can compactly represent the desired workloads. In this paper, we present QuerySmasher, an alternative scalable approach based on a divide-and-conquer strategy. Given a workload that can be answered from various data marginals, QuerySmasher splits each query into sub-queries and re-assembles the pieces into mutually orthogonal sub-workloads. These sub-workloads represent small, low-dimensional problems that can be independently and optimally answered by existing low-dimensional matrix mechanisms. QuerySmasher then stitches these solutions together to answer queries in the original workload. We show that QuerySmasher subsumes prior work, like ResidualPlanner (RP), ResidualPlanner+ (RP+), and Weighted Fourier Factorizations (WFF). We prove that it can dominate those approaches, under sum squared error, for all workloads. We also experimentally demonstrate the scalability and accuracy of QuerySmasher.
Scalable Learning of Multivariate Distributions via Coresets
Mar 20, 2026Efficient and scalable non-parametric or semi-parametric regression analysis and density estimation are of crucial importance to the fields of statistics and machine learning. However, available methods are limited in their ability to handle large-scale data. We address this issue by developing a novel coreset construction for multivariate conditional transformation models (MCTMs) to enhance their scalability and training efficiency. To the best of our knowledge, these are the first coresets for semi-parametric distributional models. Our approach yields substantial data reduction via importance sampling. It ensures with high probability that the log-likelihood remains within multiplicative error bounds of $(1\pm\varepsilon)$ and thereby maintains statistical model accuracy. Compared to conventional full-parametric models, where coresets have been incorporated before, our semi-parametric approach exhibits enhanced adaptability, particularly in scenarios where complex distributions and non-linear relationships are present, but not fully understood. To address numerical problems associated with normalizing logarithmic terms, we follow a geometric approximation based on the convex hull of input data. This ensures feasible, stable, and accurate inference in scenarios involving large amounts of data. Numerical experiments demonstrate substantially improved computational efficiency when handling large and complex datasets, thus laying the foundation for a broad range of applications within the statistics and machine learning communities.
Real-Time Oriented Object Detection Transformer in Remote Sensing Images
Mar 16, 2026Recent real-time detection transformers have gained popularity due to their simplicity and efficiency. However, these detectors do not explicitly model object rotation, especially in remote sensing imagery where objects appear at arbitrary angles, leading to challenges in angle representation, matching cost, and training stability. In this paper, we propose a real-time oriented object detection transformer, the first real-time end-to-end oriented object detector to the best of our knowledge, that addresses the above issues. Specifically, angle distribution refinement is proposed to reformulate angle regression as an iterative refinement of probability distributions, thereby capturing the uncertainty of object rotation and providing a more fine-grained angle representation. Then, we incorporate a Chamfer distance cost into bipartite matching, measuring box distance via vertex sets, enabling more accurate geometric alignment and eliminating ambiguous matches. Moreover, we propose oriented contrastive denoising to stabilize training and analyze four noise modes. We observe that a ground truth can be assigned to different index queries across different decoder layers, and analyze this issue using the proposed instability metric. We design a series of model variants and experiments to validate the proposed method. Notably, our O2-DFINE-L, O2-RTDETR-R50 and O2-DEIM-R50 achieve 77.73%/78.45%/80.15% AP50 on DOTA1.0 and 132/119/119 FPS on the 2080ti GPU. Code is available at https://github.com/wokaikaixinxin/ai4rs.
* IEEE Transactions on Geoscience and Remote Sensing, 2026, doi 10.1109/TGRS.2026.3671683
OrientedFormer: An End-to-End Transformer-Based Oriented Object Detector in Remote Sensing Images
Sep 29, 2024Oriented object detection in remote sensing images is a challenging task due to objects being distributed in multi-orientation. Recently, end-to-end transformer-based methods have achieved success by eliminating the need for post-processing operators compared to traditional CNN-based methods. However, directly extending transformers to oriented object detection presents three main issues: 1) objects rotate arbitrarily, necessitating the encoding of angles along with position and size; 2) the geometric relations of oriented objects are lacking in self-attention, due to the absence of interaction between content and positional queries; and 3) oriented objects cause misalignment, mainly between values and positional queries in cross-attention, making accurate classification and localization difficult. In this paper, we propose an end-to-end transformer-based oriented object detector, consisting of three dedicated modules to address these issues. First, Gaussian positional encoding is proposed to encode the angle, position, and size of oriented boxes using Gaussian distributions. Second, Wasserstein self-attention is proposed to introduce geometric relations and facilitate interaction between content and positional queries by utilizing Gaussian Wasserstein distance scores. Third, oriented cross-attention is proposed to align values and positional queries by rotating sampling points around the positional query according to their angles. Experiments on six datasets DIOR-R, a series of DOTA, HRSC2016 and ICDAR2015 show the effectiveness of our approach. Compared with previous end-to-end detectors, the OrientedFormer gains 1.16 and 1.21 AP$_{50}$ on DIOR-R and DOTA-v1.0 respectively, while reducing training epochs from 3$\times$ to 1$\times$. The codes are available at https://github.com/wokaikaixinxin/OrientedFormer.
Efficient Decoder for End-to-End Oriented Object Detection in Remote Sensing Images
Dec 02, 2023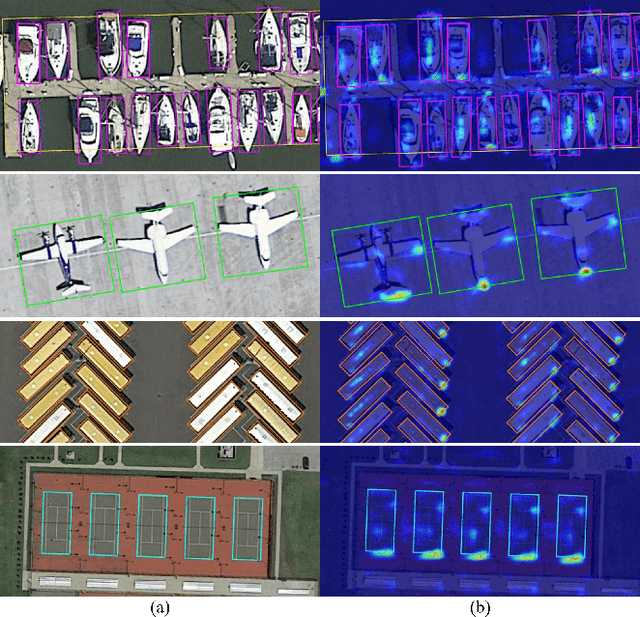
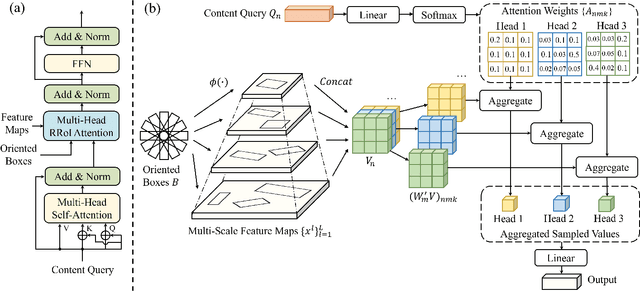
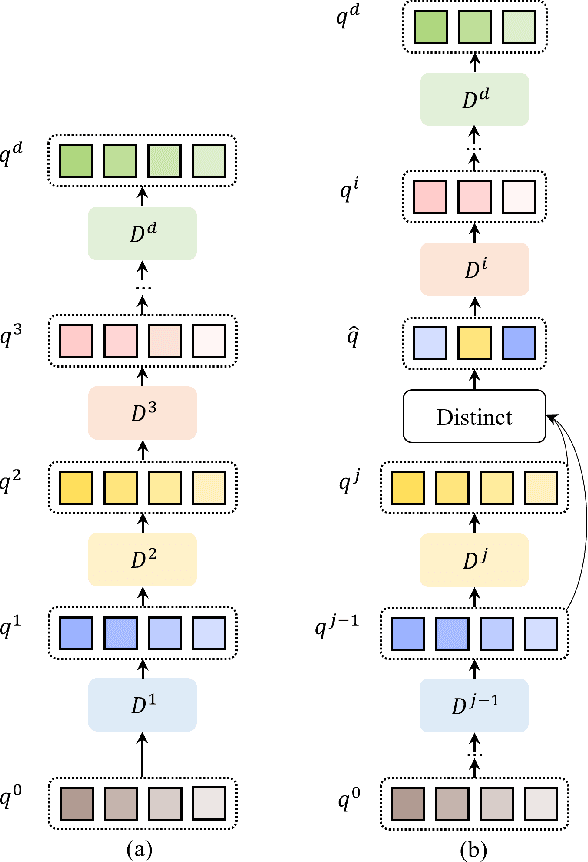
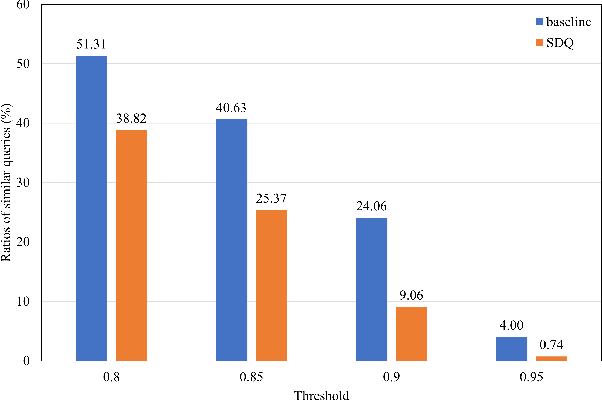
Object instances in remote sensing images often distribute with multi-orientations, varying scales, and dense distribution. These issues bring challenges to end-to-end oriented object detectors including multi-scale features alignment and a large number of queries. To address these limitations, we propose an end-to-end oriented detector equipped with an efficient decoder, which incorporates two technologies, Rotated RoI attention (RRoI attention) and Selective Distinct Queries (SDQ). Specifically, RRoI attention effectively focuses on oriented regions of interest through a cross-attention mechanism and aligns multi-scale features. SDQ collects queries from intermediate decoder layers and then filters similar queries to obtain distinct queries. The proposed SDQ can facilitate the optimization of one-to-one label assignment, without introducing redundant initial queries or extra auxiliary branches. Extensive experiments on five datasets demonstrate the effectiveness of our method. Notably, our method achieves state-of-the-art performance on DIOR-R (67.31% mAP), DOTA-v1.5 (67.43% mAP), and DOTA-v2.0 (53.28% mAP) with the ResNet50 backbone.
Semi-Supervised Semantic Segmentation Methods for UW-OCTA Diabetic Retinopathy Grade Assessment
Dec 27, 2022People with diabetes are more likely to develop diabetic retinopathy (DR) than healthy people. However, DR is the leading cause of blindness. At present, the diagnosis of diabetic retinopathy mainly relies on the experienced clinician to recognize the fine features in color fundus images. This is a time-consuming task. Therefore, in this paper, to promote the development of UW-OCTA DR automatic detection, we propose a novel semi-supervised semantic segmentation method for UW-OCTA DR image grade assessment. This method, first, uses the MAE algorithm to perform semi-supervised pre-training on the UW-OCTA DR grade assessment dataset to mine the supervised information in the UW-OCTA images, thereby alleviating the need for labeled data. Secondly, to more fully mine the lesion features of each region in the UW-OCTA image, this paper constructs a cross-algorithm ensemble DR tissue segmentation algorithm by deploying three algorithms with different visual feature processing strategies. The algorithm contains three sub-algorithms, namely pre-trained MAE, ConvNeXt, and SegFormer. Based on the initials of these three sub-algorithms, the algorithm can be named MCS-DRNet. Finally, we use the MCS-DRNet algorithm as an inspector to check and revise the results of the preliminary evaluation of the DR grade evaluation algorithm. The experimental results show that the mean dice similarity coefficient of MCS-DRNet v1 and v2 are 0.5161 and 0.5544, respectively. The quadratic weighted kappa of the DR grading evaluation is 0.7559. Our code will be released soon.
AugLimb: Compact Robotic Limb for Human Augmentation
Sep 01, 2021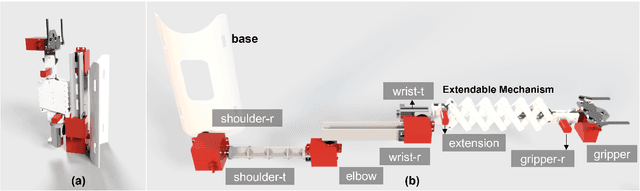
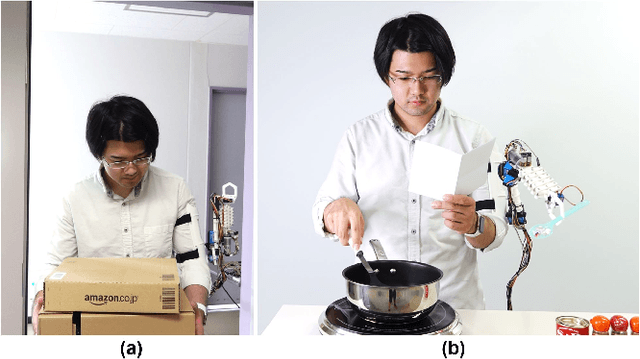
This work proposes a compact robotic limb, AugLimb, that can augment our body functions and support the daily activities. AugLimb adopts the double-layer scissor unit for the extendable mechanism which can achieve 2.5 times longer than the forearm length. The proposed device can be mounted on the user's upper arm, and transform into compact state without obstruction to wearers. The proposed device is lightweight with low burden exerted on the wearer. We developed the prototype of AugLimb to demonstrate the proposed mechanisms. We believe that the design methodology of AugLimb can facilitate human augmentation research for practical use. see http://www.jaist.ac.jp/~xie/auglimb.html
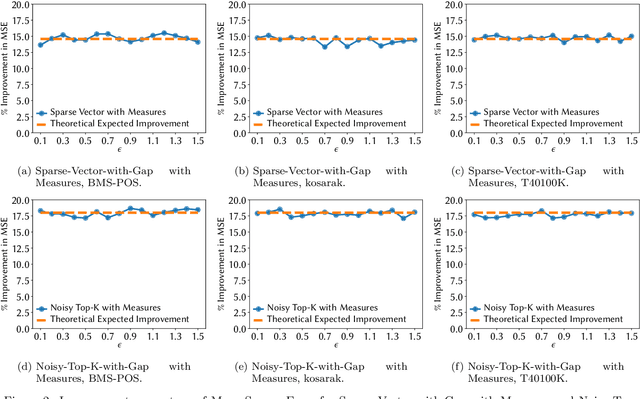
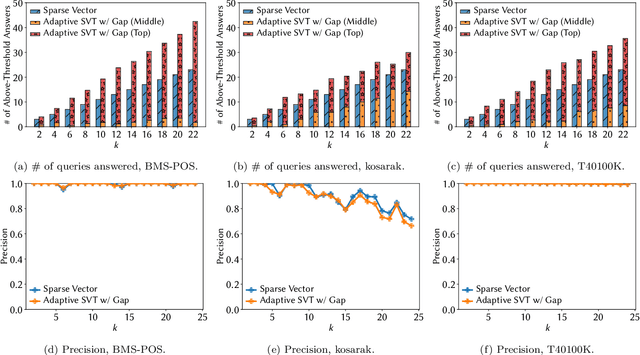
Free Gap Information from the Differentially Private Sparse Vector and Noisy Max Mechanisms
May 02, 2019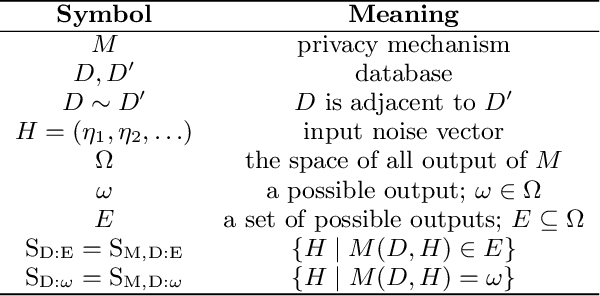
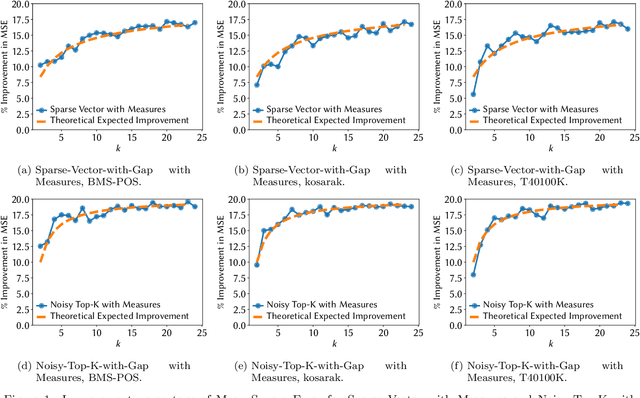
Noisy Max and Sparse Vector are selection algorithms for differential privacy and serve as building blocks for more complex algorithms. In this paper we show that both algorithms can release additional information for free (i.e., at no additional privacy cost). Noisy Max is used to return the approximate maximizer among a set of queries. We show that it can also release for free the noisy gap between the approximate maximizer and runner-up. Sparse Vector is used to return a set of queries that are approximately larger than a fixed threshold. We show that it can adaptively control its privacy budget (use less budget for queries that are likely to be much larger than the threshold) and simultaneously release for free a noisy gap between the selected queries and the threshold. It has long been suspected that Sparse Vector can release additional information, but prior attempts had incorrect proofs. Our version is proved using randomness alignment, a proof template framework borrowed from the program verification literature. We show how the free extra information in both mechanisms can be used to improve the utility of differentially private algorithms.