 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgexBalloon: Animated Objects with Balloon Plastic Actuator
Sep 10, 2021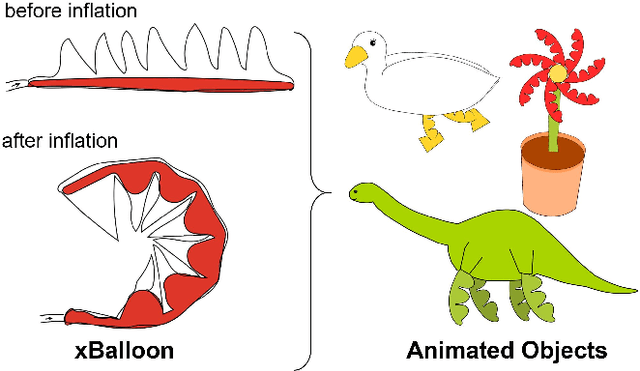
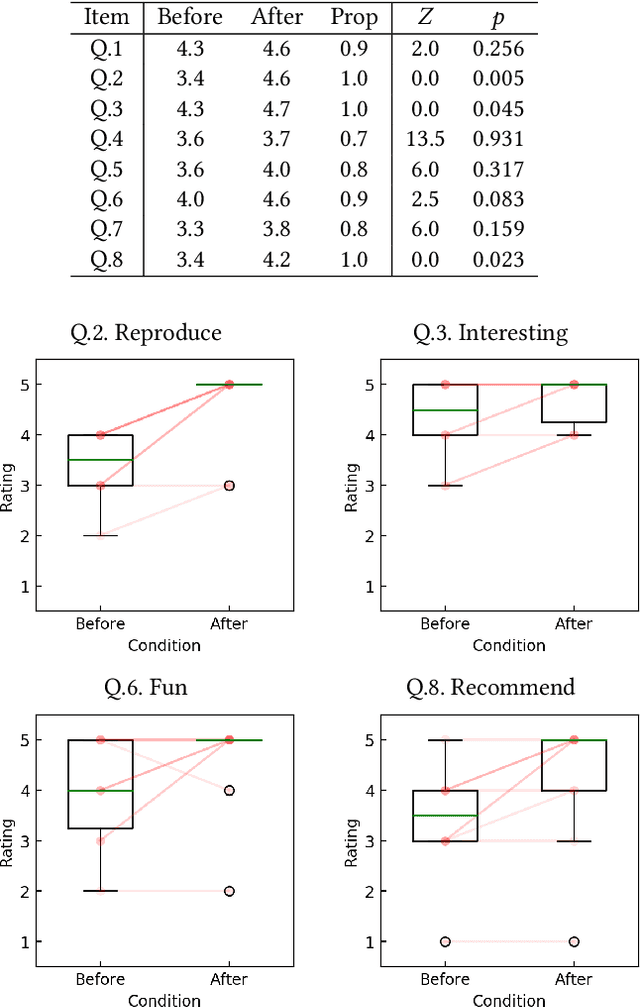

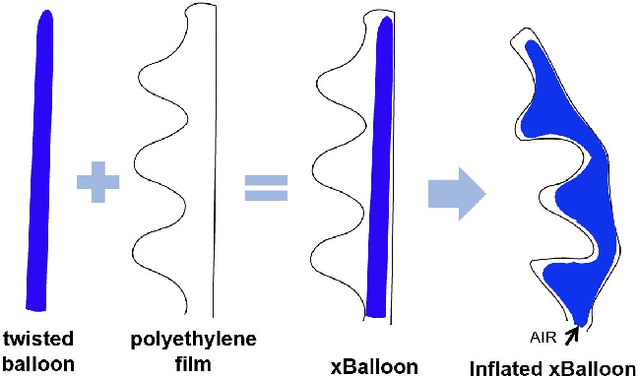
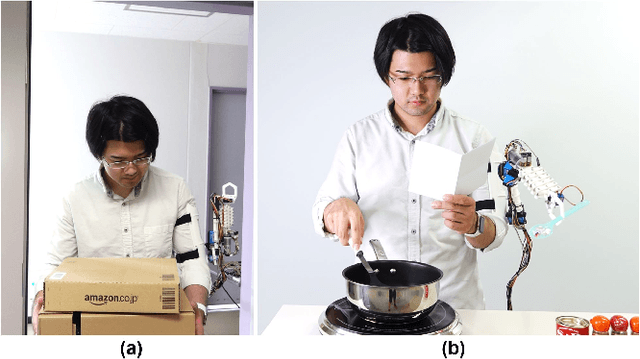
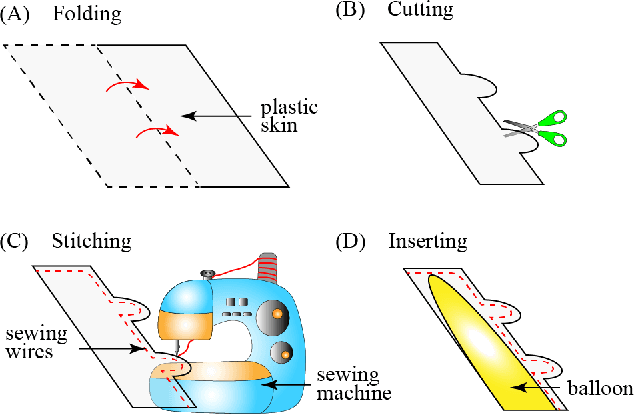
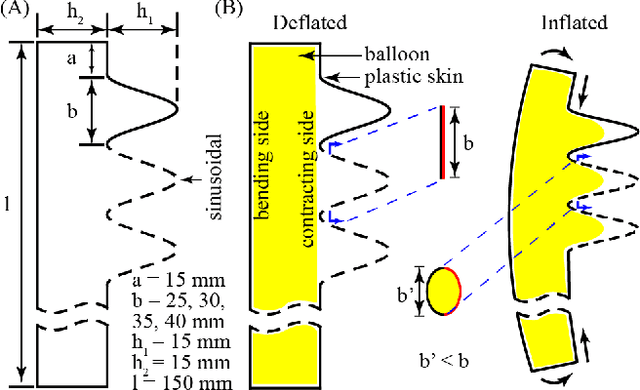
Shape-changing interfaces are promising for users to change the physical properties of common objects. However, prevailing approaches of actuation devices require either professional equipment or materials that are not commonly accessible to non-professional users. In this work, we focus on the controllable soft actuators with inflatable structures because they are soft thus safe for human computer interaction. We propose a soft actuator design, called xBalloon, that is workable, inexpensive and easy-to-fabricate. It consists of daily materials including balloons and plastics and can realize bending actuation very effectively. For characterization, we fabricated xBalloon samples with different geometrical parameters and tested them regarding the bending performance and found the analytical model describing the relationship between the shape and the bending width. We then used xBalloons to animate a series of common objects and all can work satisfactorily. We further verified the user experience about the the fabrication and found that even those with no prior robotic knowledge can fabricate xBalloons with ease and confidence. Given all these advantages, we believe that xBalloon is an ideal platform for interaction design and entertainment applications.
AugLimb: Compact Robotic Limb for Human Augmentation
Sep 01, 2021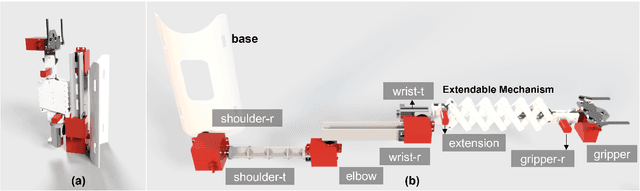
This work proposes a compact robotic limb, AugLimb, that can augment our body functions and support the daily activities. AugLimb adopts the double-layer scissor unit for the extendable mechanism which can achieve 2.5 times longer than the forearm length. The proposed device can be mounted on the user's upper arm, and transform into compact state without obstruction to wearers. The proposed device is lightweight with low burden exerted on the wearer. We developed the prototype of AugLimb to demonstrate the proposed mechanisms. We believe that the design methodology of AugLimb can facilitate human augmentation research for practical use. see http://www.jaist.ac.jp/~xie/auglimb.html
BPActuators: Lightweight and Low-Cost Soft Actuators by Balloons and Plastics
Mar 05, 2021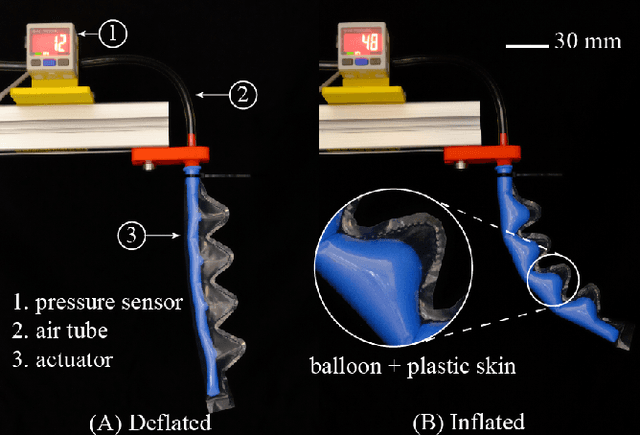
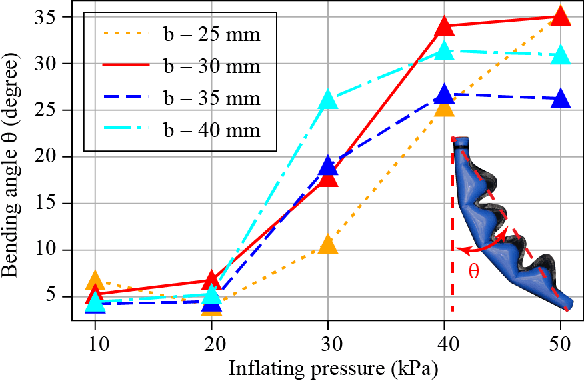
To increase the awareness and impact, soft robotics needs to go beyond the lab environment and should be readily accessible to those even with no robotic expertise. However, most prevailing manufacturing methodologies require either professional equipment or materials that are not usually available to common people, thereby constraining the accessibility of soft robotics. In this communication, we propose a lightweight and low-cost soft bending actuator, called BPActuator, that can be easily fabricated with plastics and balloons. We fabricated a range of actuators with various morphology for characterization in terms of deformation and load-bearing capacity, and demonstrated that they can bend up to 35 degrees and exert force at the tip around 0.070$\pm$0.015N, which is over 5 times higher than their average gravity. We further implemented a gripper with three fingers using the proposed actuators, and found that the gripper can realize human-like grasp of a range of daily objects. The gripper can lift objects at least 8 times heavier than its own weight. Furthermore, the BPActuator is cost effective and each costs about 0.22 USD. Given these advantages, the BPActuators are expected to significantly improve the accessibility of soft robotics to a wider group without robotic expertise.