 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA High-frequency Pneumatic Oscillator for Soft Robotics
Nov 12, 2024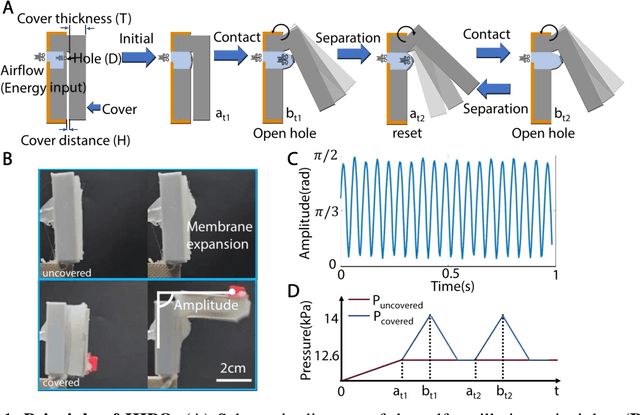
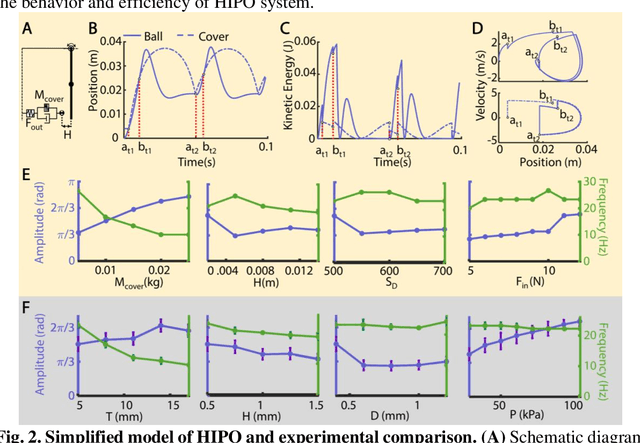
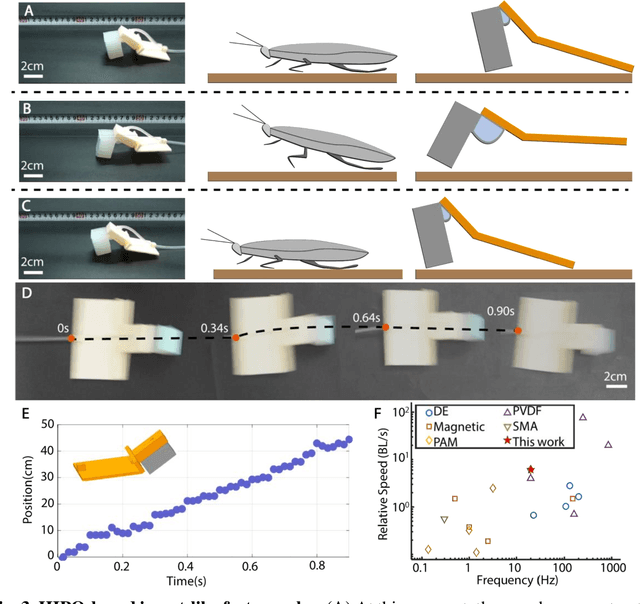
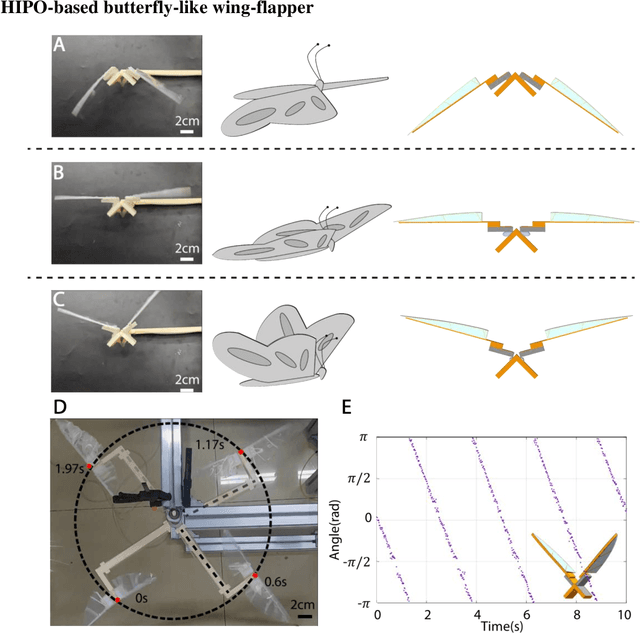
Soft robots, while highly adaptable to diverse environments through various actuation methods, still face significant performance boundary due to the inherent properties of materials. These limitations manifest in the challenge of guaranteeing rapid response and large-scale movements simultaneously, ultimately restricting the robots' absolute speed and overall efficiency. In this paper, we introduce a high-frequency pneumatic oscillator (HIPO) to overcome these challenges. Through a collision-induced phase resetting mechanism, our HIPO leverages event-based nonlinearity to trigger self-oscillation of pneumatic actuator, which positively utilizes intrinsic characteristics of materials. This enables the system to spontaneously generate periodic control signals and directly produce motion responses, eliminating the need for incorporating external actuation components. By efficiently and rapidly converting internal energy of airflow into the kinetic energy of robots, HIPO achieves a frequency of up to 20 Hz. Furthermore, we demonstrate the versatility and high-performance capabilities of HIPO through bio-inspired robots: an insect-like fast-crawler (with speeds up to 50.27 cm/s), a high-frequency butterfly-like wing-flapper, and a maneuverable duck-like swimmer. By eliminating external components and seamlessly fusing signal generation, energy conversion, and motion output, HIPO unleashes rapid and efficient motion, unlocking potential for high-performance soft robotics.
xBalloon: Animated Objects with Balloon Plastic Actuator
Sep 10, 2021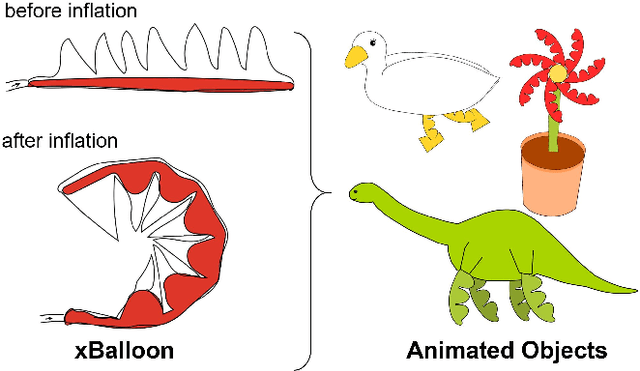
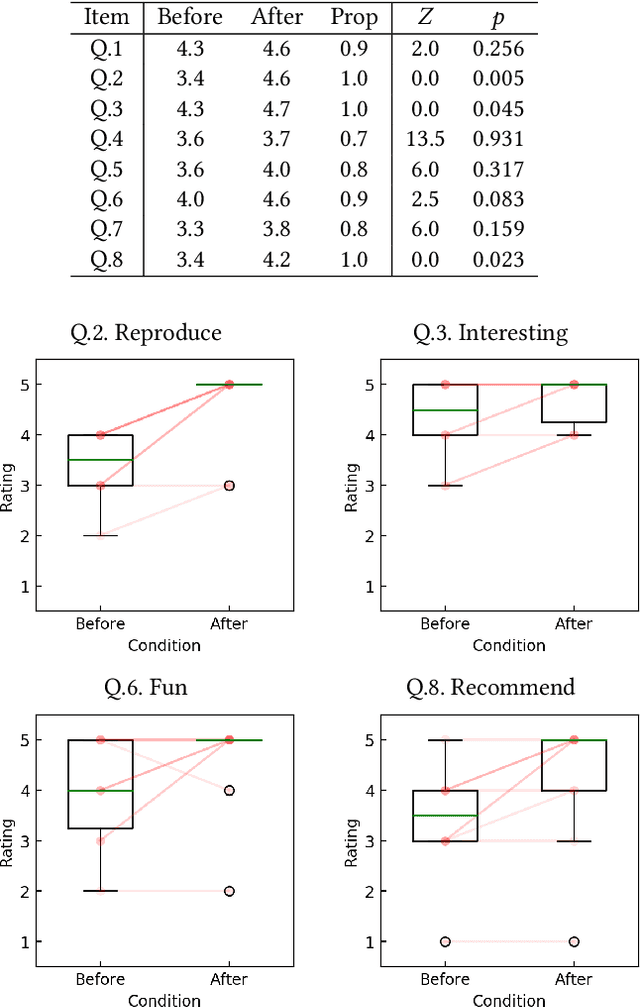

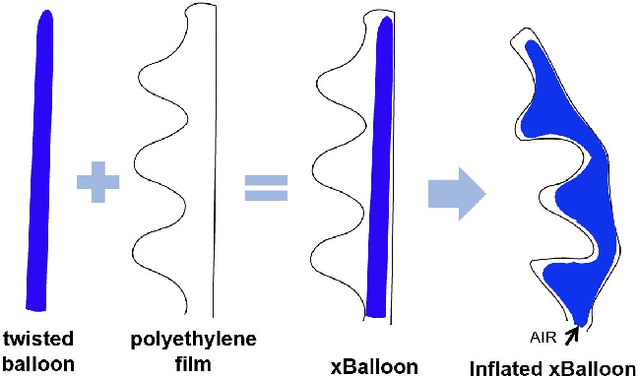
Shape-changing interfaces are promising for users to change the physical properties of common objects. However, prevailing approaches of actuation devices require either professional equipment or materials that are not commonly accessible to non-professional users. In this work, we focus on the controllable soft actuators with inflatable structures because they are soft thus safe for human computer interaction. We propose a soft actuator design, called xBalloon, that is workable, inexpensive and easy-to-fabricate. It consists of daily materials including balloons and plastics and can realize bending actuation very effectively. For characterization, we fabricated xBalloon samples with different geometrical parameters and tested them regarding the bending performance and found the analytical model describing the relationship between the shape and the bending width. We then used xBalloons to animate a series of common objects and all can work satisfactorily. We further verified the user experience about the the fabrication and found that even those with no prior robotic knowledge can fabricate xBalloons with ease and confidence. Given all these advantages, we believe that xBalloon is an ideal platform for interaction design and entertainment applications.
BPActuators: Lightweight and Low-Cost Soft Actuators by Balloons and Plastics
Mar 05, 2021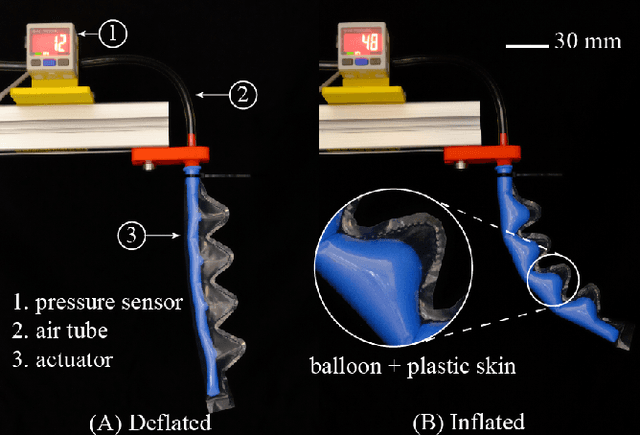
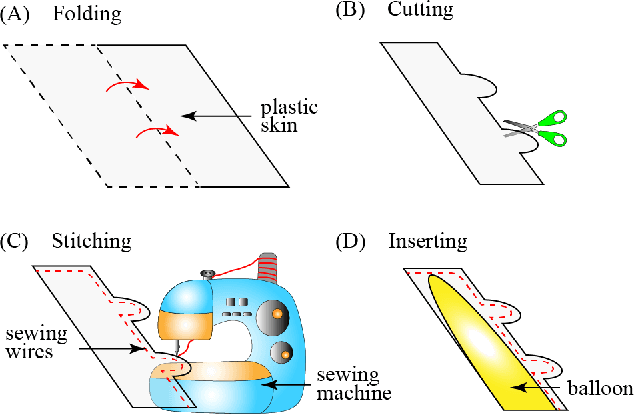
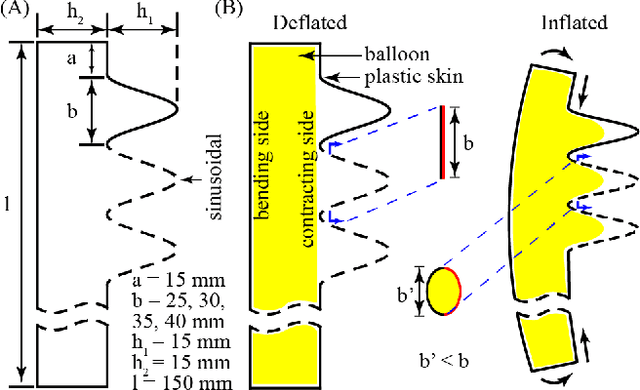
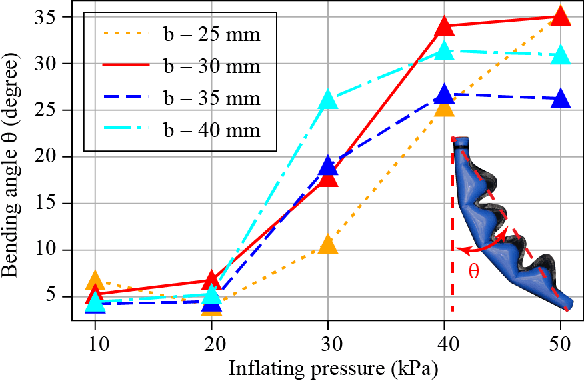
To increase the awareness and impact, soft robotics needs to go beyond the lab environment and should be readily accessible to those even with no robotic expertise. However, most prevailing manufacturing methodologies require either professional equipment or materials that are not usually available to common people, thereby constraining the accessibility of soft robotics. In this communication, we propose a lightweight and low-cost soft bending actuator, called BPActuator, that can be easily fabricated with plastics and balloons. We fabricated a range of actuators with various morphology for characterization in terms of deformation and load-bearing capacity, and demonstrated that they can bend up to 35 degrees and exert force at the tip around 0.070$\pm$0.015N, which is over 5 times higher than their average gravity. We further implemented a gripper with three fingers using the proposed actuators, and found that the gripper can realize human-like grasp of a range of daily objects. The gripper can lift objects at least 8 times heavier than its own weight. Furthermore, the BPActuator is cost effective and each costs about 0.22 USD. Given these advantages, the BPActuators are expected to significantly improve the accessibility of soft robotics to a wider group without robotic expertise.