 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA High-frequency Pneumatic Oscillator for Soft Robotics
Paper and Code
Nov 12, 2024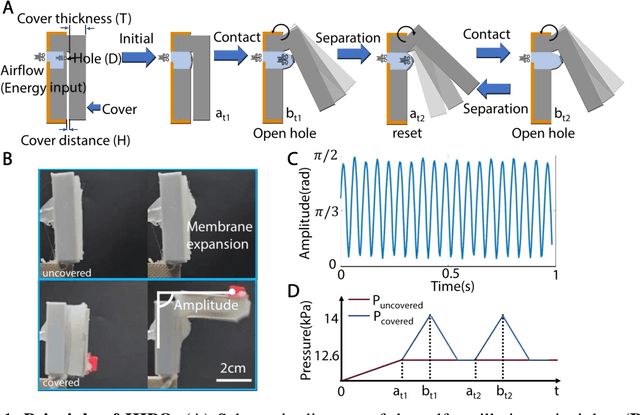
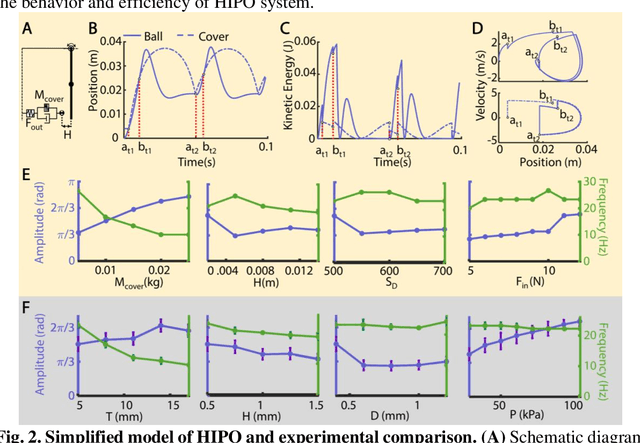
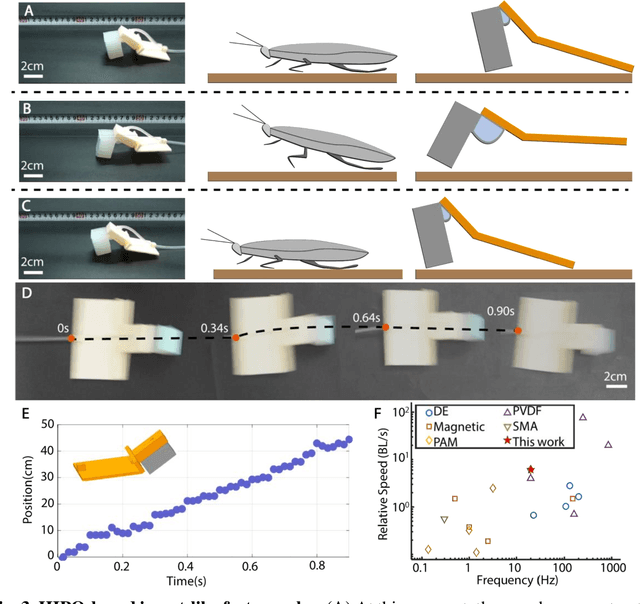
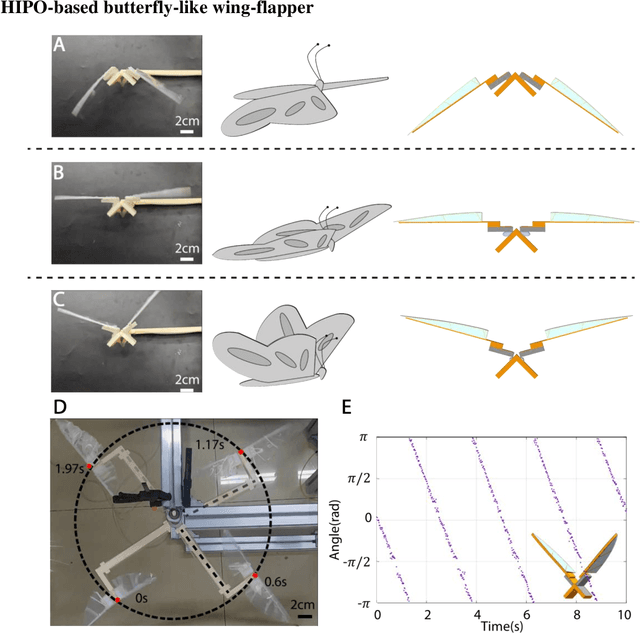
Soft robots, while highly adaptable to diverse environments through various actuation methods, still face significant performance boundary due to the inherent properties of materials. These limitations manifest in the challenge of guaranteeing rapid response and large-scale movements simultaneously, ultimately restricting the robots' absolute speed and overall efficiency. In this paper, we introduce a high-frequency pneumatic oscillator (HIPO) to overcome these challenges. Through a collision-induced phase resetting mechanism, our HIPO leverages event-based nonlinearity to trigger self-oscillation of pneumatic actuator, which positively utilizes intrinsic characteristics of materials. This enables the system to spontaneously generate periodic control signals and directly produce motion responses, eliminating the need for incorporating external actuation components. By efficiently and rapidly converting internal energy of airflow into the kinetic energy of robots, HIPO achieves a frequency of up to 20 Hz. Furthermore, we demonstrate the versatility and high-performance capabilities of HIPO through bio-inspired robots: an insect-like fast-crawler (with speeds up to 50.27 cm/s), a high-frequency butterfly-like wing-flapper, and a maneuverable duck-like swimmer. By eliminating external components and seamlessly fusing signal generation, energy conversion, and motion output, HIPO unleashes rapid and efficient motion, unlocking potential for high-performance soft robotics.