 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA High-frequency Pneumatic Oscillator for Soft Robotics
Nov 12, 2024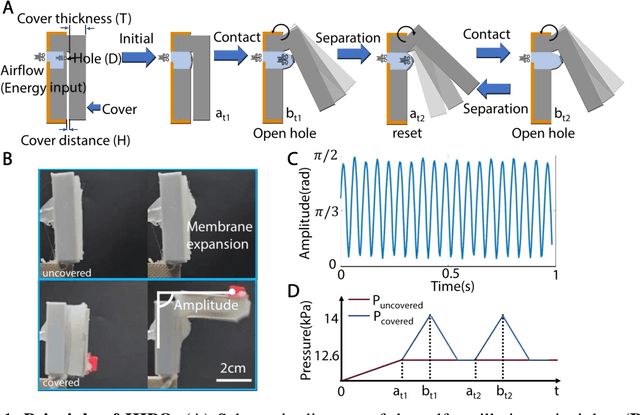
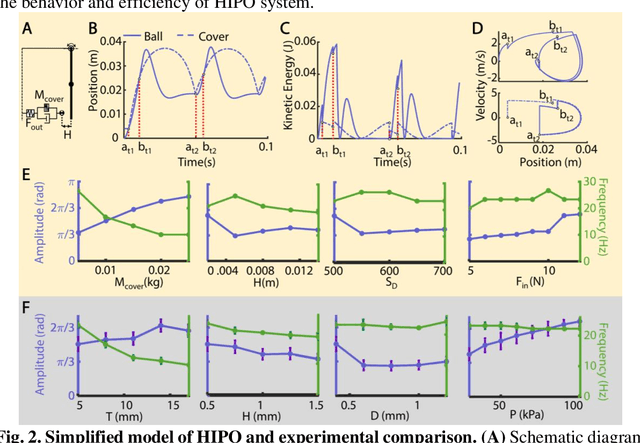
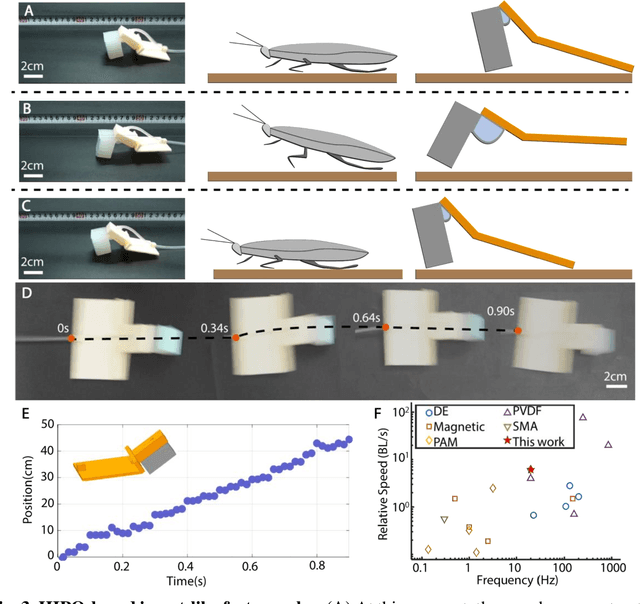
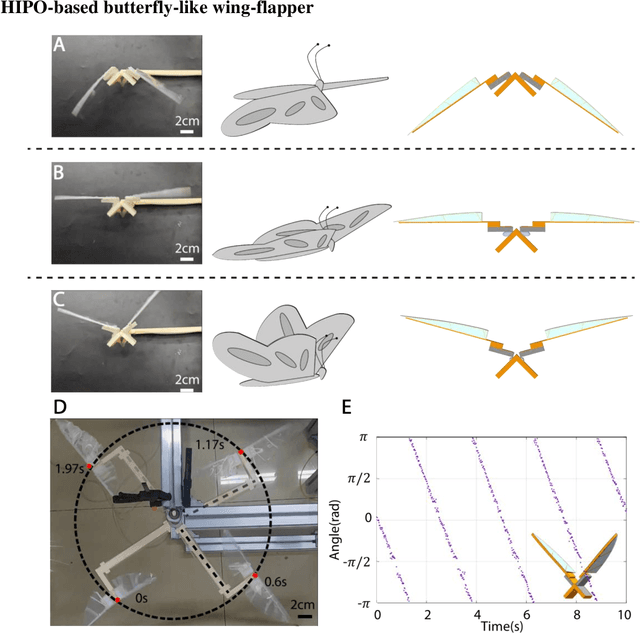
Soft robots, while highly adaptable to diverse environments through various actuation methods, still face significant performance boundary due to the inherent properties of materials. These limitations manifest in the challenge of guaranteeing rapid response and large-scale movements simultaneously, ultimately restricting the robots' absolute speed and overall efficiency. In this paper, we introduce a high-frequency pneumatic oscillator (HIPO) to overcome these challenges. Through a collision-induced phase resetting mechanism, our HIPO leverages event-based nonlinearity to trigger self-oscillation of pneumatic actuator, which positively utilizes intrinsic characteristics of materials. This enables the system to spontaneously generate periodic control signals and directly produce motion responses, eliminating the need for incorporating external actuation components. By efficiently and rapidly converting internal energy of airflow into the kinetic energy of robots, HIPO achieves a frequency of up to 20 Hz. Furthermore, we demonstrate the versatility and high-performance capabilities of HIPO through bio-inspired robots: an insect-like fast-crawler (with speeds up to 50.27 cm/s), a high-frequency butterfly-like wing-flapper, and a maneuverable duck-like swimmer. By eliminating external components and seamlessly fusing signal generation, energy conversion, and motion output, HIPO unleashes rapid and efficient motion, unlocking potential for high-performance soft robotics.
Multi-Site Infant Brain Segmentation Algorithms: The iSeg-2019 Challenge
Jul 11, 2020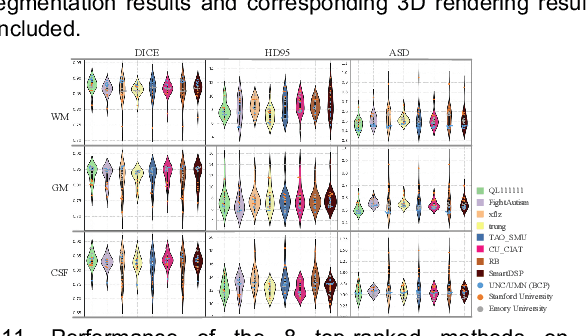
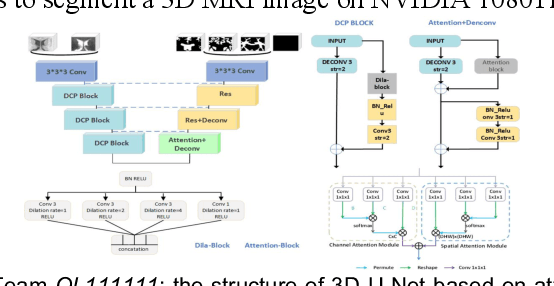
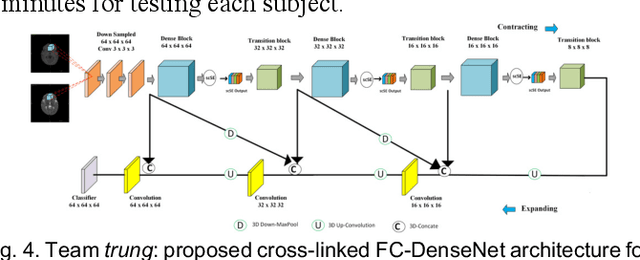
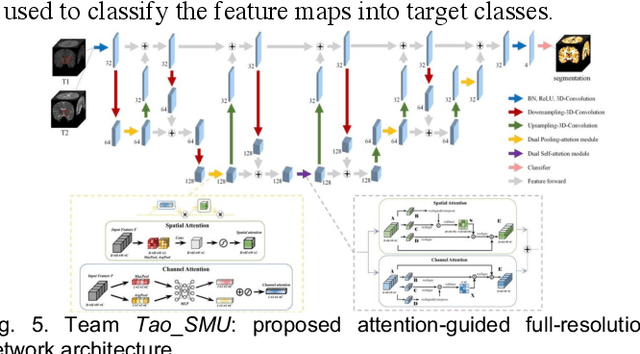
To better understand early brain growth patterns in health and disorder, it is critical to accurately segment infant brain magnetic resonance (MR) images into white matter (WM), gray matter (GM), and cerebrospinal fluid (CSF). Deep learning-based methods have achieved state-of-the-art performance; however, one of major limitations is that the learning-based methods may suffer from the multi-site issue, that is, the models trained on a dataset from one site may not be applicable to the datasets acquired from other sites with different imaging protocols/scanners. To promote methodological development in the community, iSeg-2019 challenge (http://iseg2019.web.unc.edu) provides a set of 6-month infant subjects from multiple sites with different protocols/scanners for the participating methods. Training/validation subjects are from UNC (MAP) and testing subjects are from UNC/UMN (BCP), Stanford University, and Emory University. By the time of writing, there are 30 automatic segmentation methods participating in iSeg-2019. We review the 8 top-ranked teams by detailing their pipelines/implementations, presenting experimental results and evaluating performance in terms of the whole brain, regions of interest, and gyral landmark curves. We also discuss their limitations and possible future directions for the multi-site issue. We hope that the multi-site dataset in iSeg-2019 and this review article will attract more researchers on the multi-site issue.