 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-directional Bicycle Robot for Steel Structure Inspection
Mar 27, 2021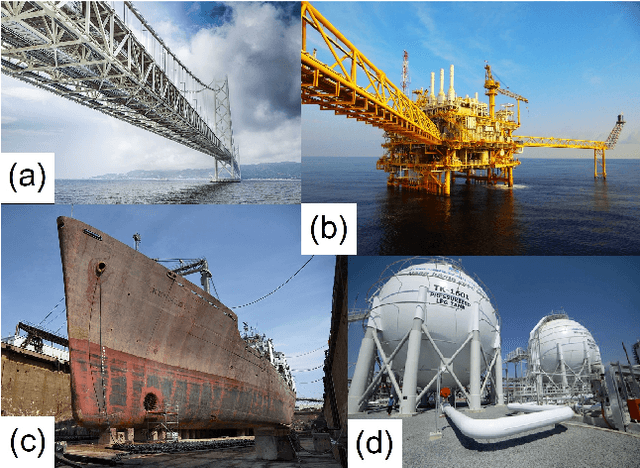

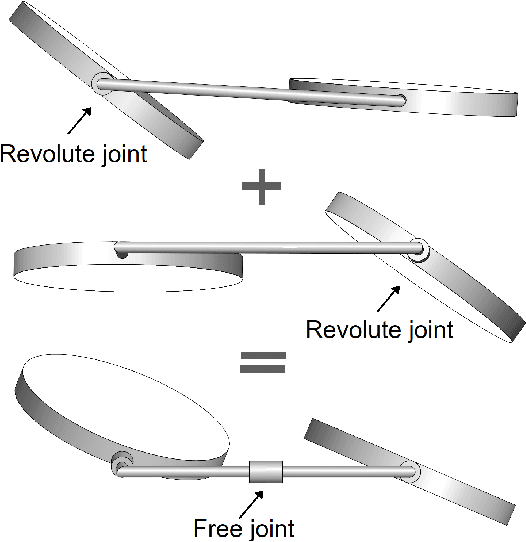
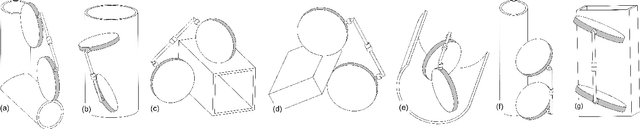
This paper presents a novel design of a multi-directional bicycle robot, which targets inspecting general ferromagnetic structures including complex-shaped structures. The locomotion concept is based on arranging two magnetic wheels in a bicycle-like configuration with two independent steering actuators. This configuration allows the robot to possess multi-directional mobility. An additional free joint helps the robot naturally adapt to non-flat and complex surfaces of steel structures. The robot has the biggest advantage to be mechanically simple with high mobility. Besides, the robot is equipped with sensing tools for structure health monitoring. We demonstrate the deployment of our robot to perform steel rust detection on steel bridges. The final inspection results are visualized as 3D models of the bridges together with marked locations of detected rusty areas.
Development of a Steel Bridge Climbing Robot
Sep 15, 2018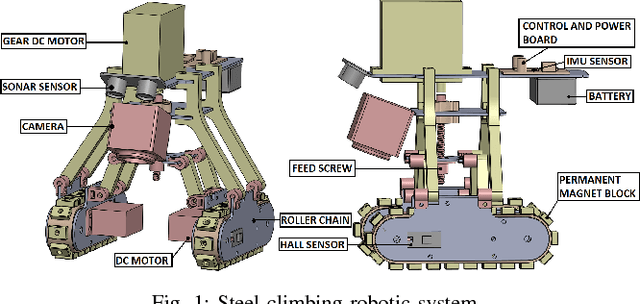
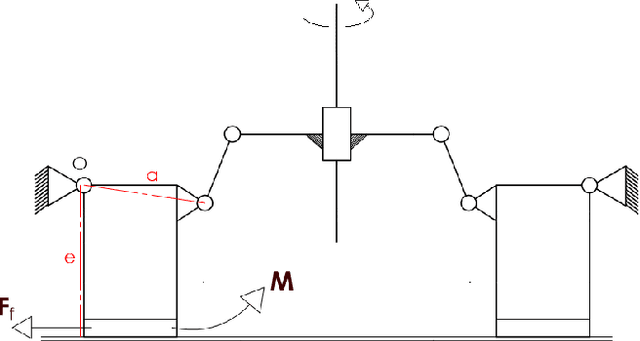
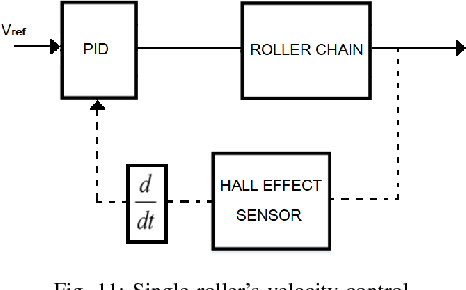
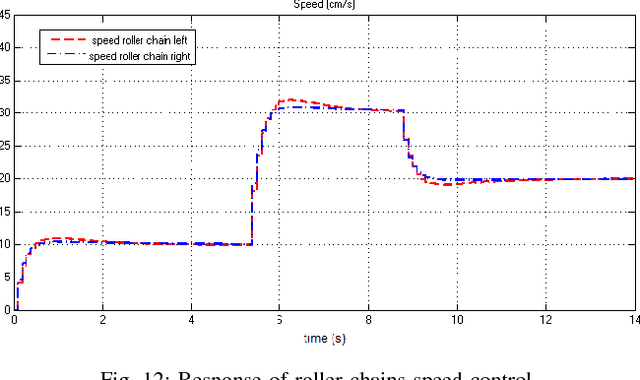
Motivated by a high demand for automated inspection of civil infrastructure, this work presents a new design and development of a tank-like robot for structural health monitoring. Unlike most existing magnetic wheeled mobile robot designs, which may be suitable for climbing on flat steel surface, our proposed tank-like robot design uses reciprocating mechanism and roller-chains to make it capable of climbing on different structural shapes (e.g., cylinder, cube) with coated or non-coated steel surfaces. The proposed robot is able to transition from one surface to the other (e.g., from flat surface to curving surface). Taking into account of several strict considerations (including tight dimension, efficient adhesion and climbing flexibility) to adapt with various shapes of steel structures, a prototype tank-like robot incorporating multiple sensors (hall-effects, sonars, inertial measurement unit and camera), has been developed. Rigorous analysis of robot kinematics, adhesion force, sliding failure and turn-over failure has been conducted to demonstrate the stability of the proposed design. Mechanical and magnetic force analysis together with sliding/turn-over failure investigation can serve as an useful framework for designing various steel climbing robots in the future. Experimental results and field deployments confirm the adhesion and climbing capability of the developed robot.