 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Path Finding under Limited Communication Range Constraint via Dynamic Leading
Jan 06, 2025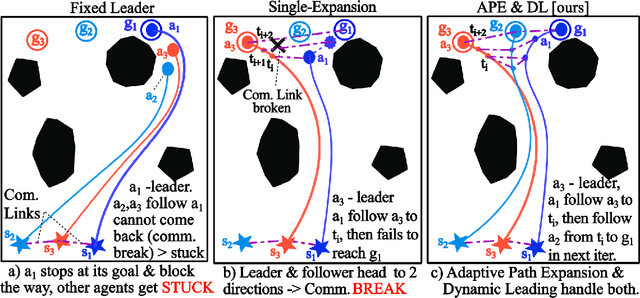
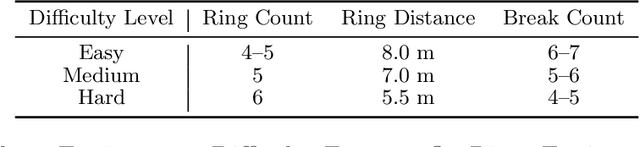
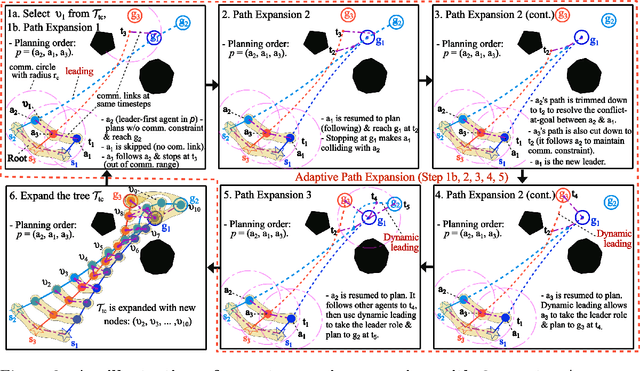
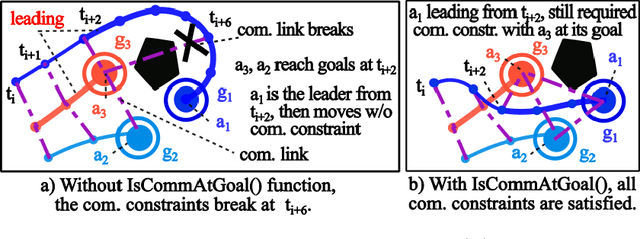
This paper proposes a novel framework to handle a multi-agent path finding problem under a limited communication range constraint, where all agents must have a connected communication channel to the rest of the team. Many existing approaches to multi-agent path finding (e.g., leader-follower platooning) overcome computational challenges of planning in this domain by planning one agent at a time in a fixed order. However, fixed leader-follower approaches can become stuck during planning, limiting their practical utility in dense-clutter environments. To overcome this limitation, we develop dynamic leading multi-agent path finding, which allows for dynamic reselection of the leading agent during path planning whenever progress cannot be made. The experiments show the efficiency of our framework, which can handle up to 25 agents with more than 90% success-rate across five environment types where baselines routinely fail.
A Survey of Multi-Robot Motion Planning
Oct 05, 2023Multi-robot Motion Planning (MRMP) is an active research field which has gained attention over the years. MRMP has significant roles to improve the efficiency and reliability of multi-robot system in a wide range of applications from delivery robots to collaborative assembly lines. This survey provides an overview of MRMP taxonomy, state-of-the-art algorithms, and approaches which have been developed for multi-robot systems. This study also discusses the strengths and limitations of each algorithm and their applications in various scenarios. Moreover, based on this, we can draw out open problems for future research.
Guided Sampling-Based Motion Planning with Dynamics in Unknown Environments
Jun 15, 2023Despite recent progress improving the efficiency and quality of motion planning, planning collision-free and dynamically-feasible trajectories in partially-mapped environments remains challenging, since constantly replanning as unseen obstacles are revealed during navigation both incurs significant computational expense and can introduce problematic oscillatory behavior. To improve the quality of motion planning in partial maps, this paper develops a framework that augments sampling-based motion planning to leverage a high-level discrete layer and prior solutions to guide motion-tree expansion during replanning, affording both (i) faster planning and (ii) improved solution coherence. Our framework shows significant improvements in runtime and solution distance when compared with other sampling-based motion planners.
Control and Navigation Framework for a Hybrid Steel Bridge Inspection Robot
Feb 01, 2021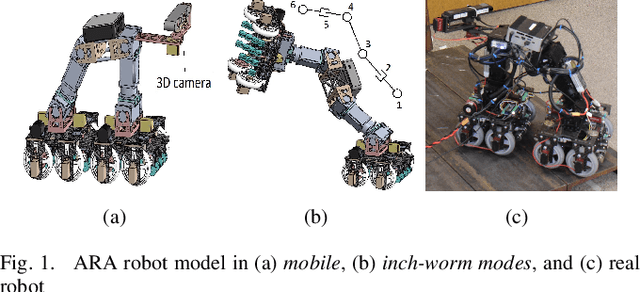



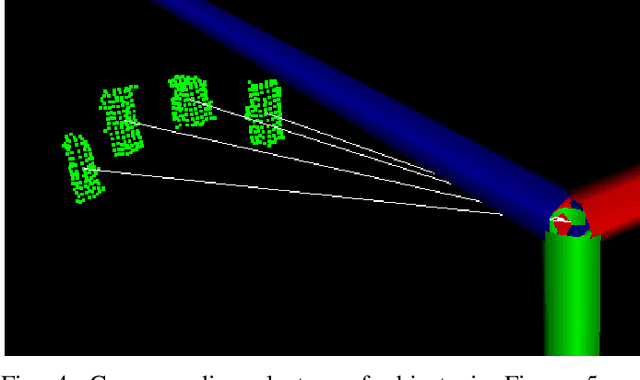
Autonomous navigation of steel bridge inspection robots is essential for proper maintenance. The majority of existing robotic solutions for steel bridge inspection requires human intervention to assist in the control and navigation. In this paper, a control and navigation framework has been proposed for the steel bridge inspection robot developed by the Advanced Robotics and Automation (ARA)to facilitate autonomous real-time navigation and minimize human intervention. The ARA robot is designed to work in two modes: mobile and inch-worm. The robot uses mobile mode when moving on a plane surface and inch-worm mode when jumping from one surface to the other. To allow the ARA robot to switch between mobile and inch-worm modes, a switching controller is developed with 3D point cloud data based. The surface detection algorithm is proposed to allow the robot to check the availability of steel surfaces (plane, area, and height) to determine the transformation from mobile mode to inch-worm one. To have the robot safely navigate and visit all steel members of the bridge, four algorithms are developed to process the data from a depth camera, segment it into clusters, estimate the boundaries, construct a graph representing the structure, generate the shortest inspection path with any starting and ending points, and determine available robot configuration for path planning. Experiments on steel bridge structures setup highlight the effective performance of the algorithms, and the potential to apply to the ARA robot to run on real bridge structures.
Navigation Framework for a Hybrid Steel Bridge Inspection Robot
Feb 01, 2021



Autonomous navigation is essential for steel bridge inspection robot to monitor and maintain the working condition of steel bridges. Majority of existing robotic solutions requires human support to navigate the robot doing the inspection. In this paper, a navigation framework is proposed for ARA robot [1], [2] to run on mobile mode. In this mode, the robot needs to cross and inspect all the available steel bars. The most significant contributions of this research are four algorithms, which can process the depth data, segment it into clusters, estimate the boundaries, construct a graph to represent the structure, generate a shortest inspection path with any starting and ending points, and determine available robot configuration for path planning. Experiments on steel bridge structures setup highlight the effective performance of the algorithms, and the potential to apply to the ARA robot to run on real bridge structures. We released our source code in Github for the research community to use.
A Deep Learning-Based Autonomous RobotManipulator for Sorting Application
Sep 08, 2020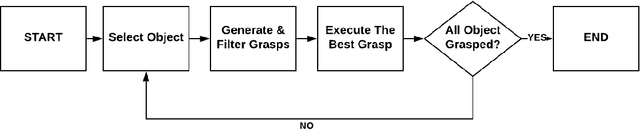
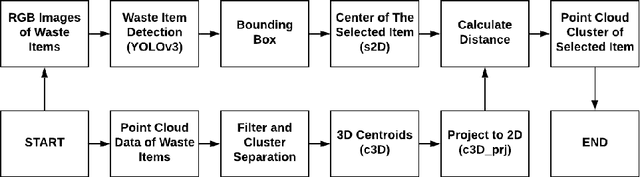
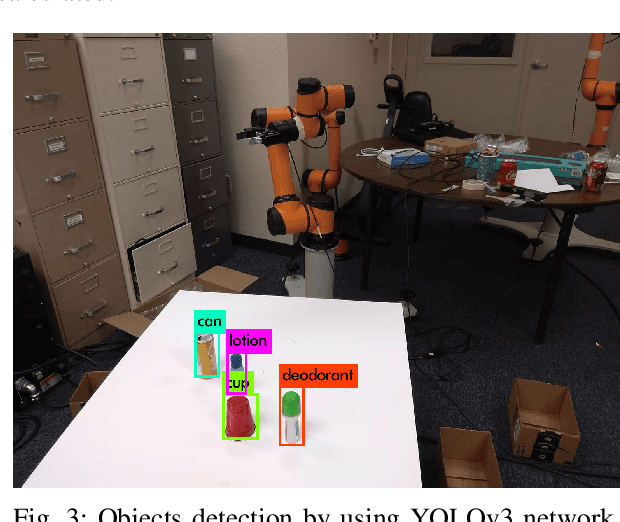
Robot manipulation and grasping mechanisms have received considerable attention in the recent past, leading to the development of wide range of industrial applications. This paper proposes the development of an autonomous robotic grasping system for object sorting application. RGB-D data is used by the robot for performing object detection, pose estimation, trajectory generation, and object sorting tasks. The proposed approach can also handle grasping certain objects chosen by users. Trained convolutional neural networks are used to perform object detection and determine the corresponding point cloud cluster of the object to be grasped. From the selected point cloud data, a grasp generator algorithm outputs potential grasps. A grasp filter then scores these potential grasps, and the highest-scored grasp is chosen to execute on a real robot. A motion planner generates collision-free trajectories to execute the chosen grasp. The experiments on AUBO robotic manipulator show the potentials of the proposed approach in the context of autonomous object sorting with robust and fast sorting performance.
Control Framework for a Hybrid-steel Bridge Inspection Robot
Sep 01, 2020



Autonomous navigation of steel bridge inspection robots is essential for proper maintenance. The majority of existing robotic solutions for bridge inspection require human intervention to assist in the control and navigation. In this paper, a control system framework has been proposed for a previously designed ARA robot [1], which facilitates autonomous real-time navigation and minimizes human involvement. The mechanical design and control framework of ARA robot enables two different configurations, namely the mobile and inch-worm transformation. In addition, a switching control was developed with 3D point clouds of steel surfaces as the input which allows the robot to switch between mobile and inch-worm transformation. The surface availability algorithm (considers plane, area, and height) of the switching control enables the robot to perform inch-worm jumps autonomously. Themobiletransformationallows the robot to move on continuous steel surfaces and perform visual inspection of steel bridge structures. Practical experiments on actual steel bridge structures highlight the effective performance of ARA robot with the proposed control framework for autonomous navigation during a visual inspection of steel bridges.