 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Framework for a Hybrid-steel Bridge Inspection Robot
Sep 01, 2020



Autonomous navigation of steel bridge inspection robots is essential for proper maintenance. The majority of existing robotic solutions for bridge inspection require human intervention to assist in the control and navigation. In this paper, a control system framework has been proposed for a previously designed ARA robot [1], which facilitates autonomous real-time navigation and minimizes human involvement. The mechanical design and control framework of ARA robot enables two different configurations, namely the mobile and inch-worm transformation. In addition, a switching control was developed with 3D point clouds of steel surfaces as the input which allows the robot to switch between mobile and inch-worm transformation. The surface availability algorithm (considers plane, area, and height) of the switching control enables the robot to perform inch-worm jumps autonomously. Themobiletransformationallows the robot to move on continuous steel surfaces and perform visual inspection of steel bridge structures. Practical experiments on actual steel bridge structures highlight the effective performance of ARA robot with the proposed control framework for autonomous navigation during a visual inspection of steel bridges.
A Multi-Robotic System for Environmental Cleaning
Nov 02, 2018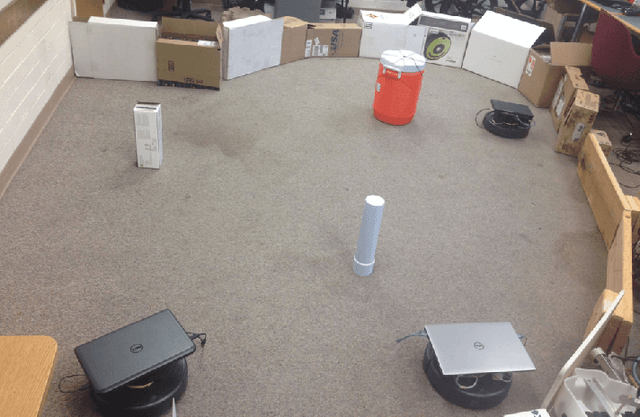
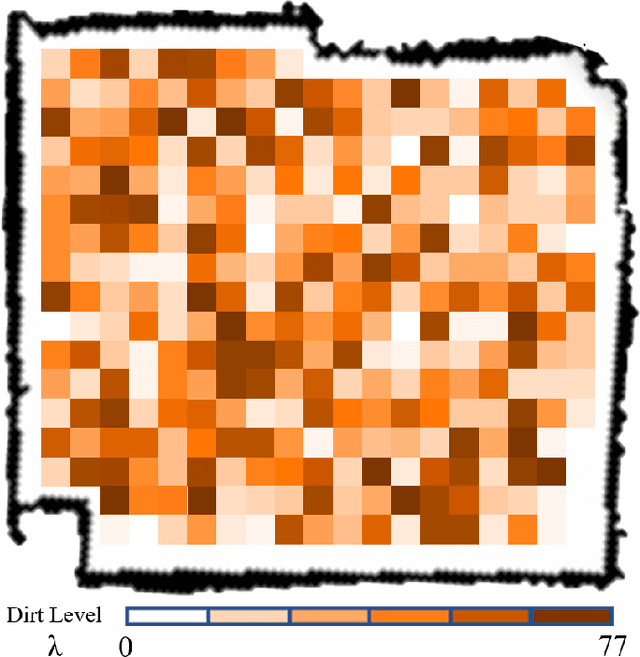
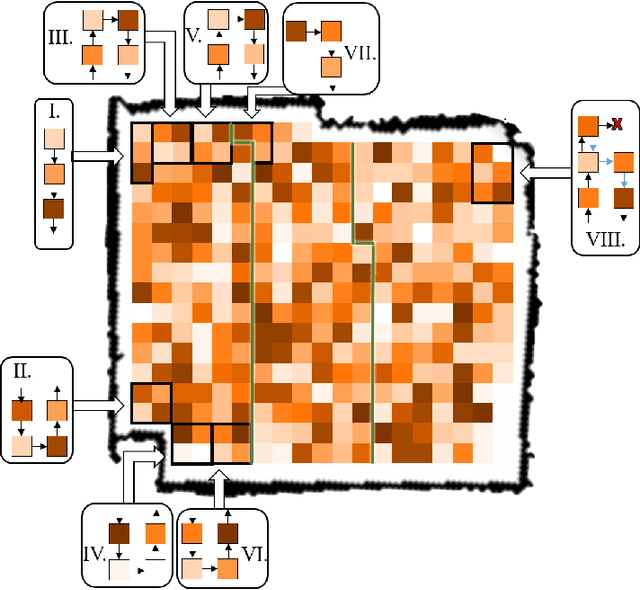
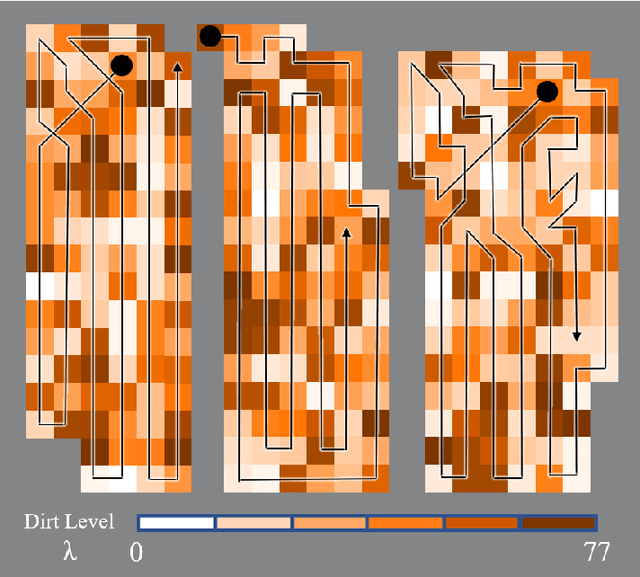
There is a lot of waste in an industrial environment that could cause harmful effects to both the products and the workers resulting in product defects, itchy eyes or chronic obstructive pulmonary disease, etc. While automative cleaning robots could be used, the environment is often too big for one robot to clean alone in addition to the fact that it does not have adequate stored dirt capacity. We present a multi-robotic dirt cleaning system algorithm for multiple automatic iRobot Creates teaming to efficiently clean an environment. Moreover, since some spaces in the environment are clean while others are dirty, our multi-robotic system possesses a path planning algorithm to allow the robot team to clean efficiently by spending more time on the area with higher dirt level. Overall, our multi-robotic system outperforms the single robot system in time efficiency while having almost the same total battery usage and cleaning efficiency result.