 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Augmented Model-Based Multi-Robot Planning for Time-Critical Search and Inspection Under Uncertainty
Jul 08, 2025In disaster response or surveillance operations, quickly identifying areas needing urgent attention is critical, but deploying response teams to every location is inefficient or often impossible. Effective performance in this domain requires coordinating a multi-robot inspection team to prioritize inspecting locations more likely to need immediate response, while also minimizing travel time. This is particularly challenging because robots must directly observe the locations to determine which ones require additional attention. This work introduces a multi-robot planning framework for coordinated time-critical multi-robot search under uncertainty. Our approach uses a graph neural network to estimate the likelihood of PoIs needing attention from noisy sensor data and then uses those predictions to guide a multi-robot model-based planner to determine the cost-effective plan. Simulated experiments demonstrate that our planner improves performance at least by 16.3\%, 26.7\%, and 26.2\% for 1, 3, and 5 robots, respectively, compared to non-learned and learned baselines. We also validate our approach on real-world platforms using quad-copters.
Guided Sampling-Based Motion Planning with Dynamics in Unknown Environments
Jun 15, 2023Despite recent progress improving the efficiency and quality of motion planning, planning collision-free and dynamically-feasible trajectories in partially-mapped environments remains challenging, since constantly replanning as unseen obstacles are revealed during navigation both incurs significant computational expense and can introduce problematic oscillatory behavior. To improve the quality of motion planning in partial maps, this paper develops a framework that augments sampling-based motion planning to leverage a high-level discrete layer and prior solutions to guide motion-tree expansion during replanning, affording both (i) faster planning and (ii) improved solution coherence. Our framework shows significant improvements in runtime and solution distance when compared with other sampling-based motion planners.
Learning Augmented, Multi-Robot Long-Horizon Navigation in Partially Mapped Environments
Mar 29, 2023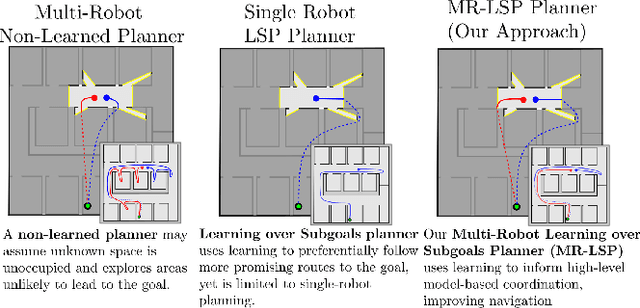
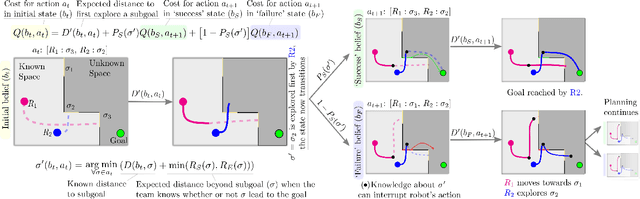
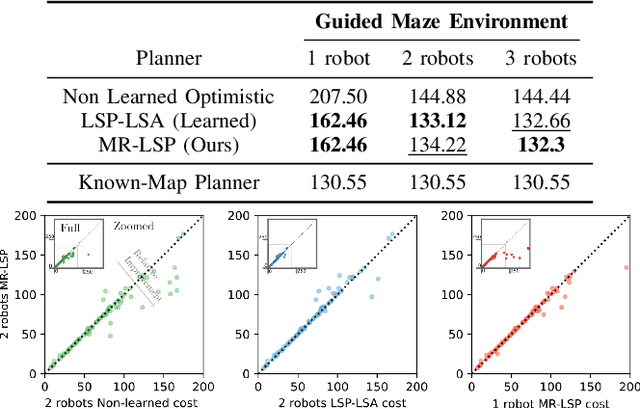
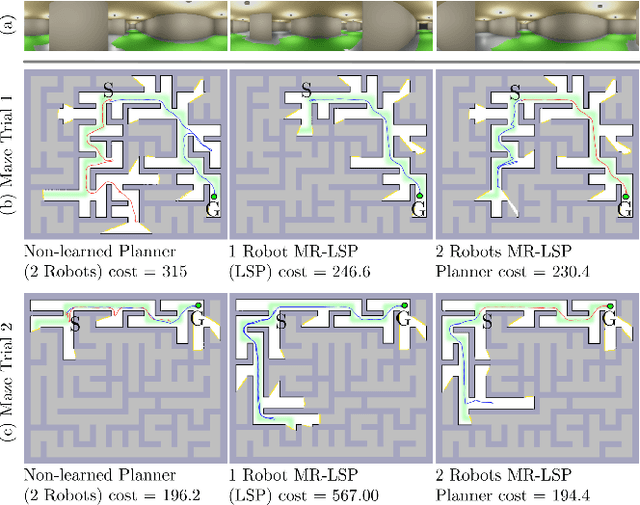
We present a novel approach for efficient and reliable goal-directed long-horizon navigation for a multi-robot team in a structured, unknown environment by predicting statistics of unknown space. Building on recent work in learning-augmented model based planning under uncertainty, we introduce a high-level state and action abstraction that lets us approximate the challenging Dec-POMDP into a tractable stochastic MDP. Our Multi-Robot Learning over Subgoals Planner (MR-LSP) guides agents towards coordinated exploration of regions more likely to reach the unseen goal. We demonstrate improvement in cost against other multi-robot strategies; in simulated office-like environments, we show that our approach saves 13.29% (2 robot) and 4.6% (3 robot) average cost versus standard non-learned optimistic planning and a learning-informed baseline.
Search Disaster Victims using Sound Source Localization
Mar 10, 2021



Sound Source Localization (SSL) are used to estimate the position of sound sources. Various methods have been used for detecting sound and its localization. This paper presents a system for stationary sound source localization by cubical microphone array consisting of eight microphones placed on four vertical adjacent faces which is mounted on three wheel omni-directional drive for the inspection and monitoring of the disaster victims in disaster areas. The proposed method localizes sound source on a 3D space by grid search method using Generalized Cross Correlation Phase Transform (GCC-PHAT) which is robust when operating in real life scenario where there is lack of visibility. The computed azimuth and elevation angle of victimized human voice are fed to embedded omni-directional drive system which navigates the vehicle automatically towards the stationary sound source.
* 9 pages, 17 figures, 17th ISCRAM Conference Blacksburg, VA, USA