 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGA-DRL: Genetic Algorithm-Based Function Optimizer in Deep Reinforcement Learning for Robotic Manipulation Tasks
Paper and Code
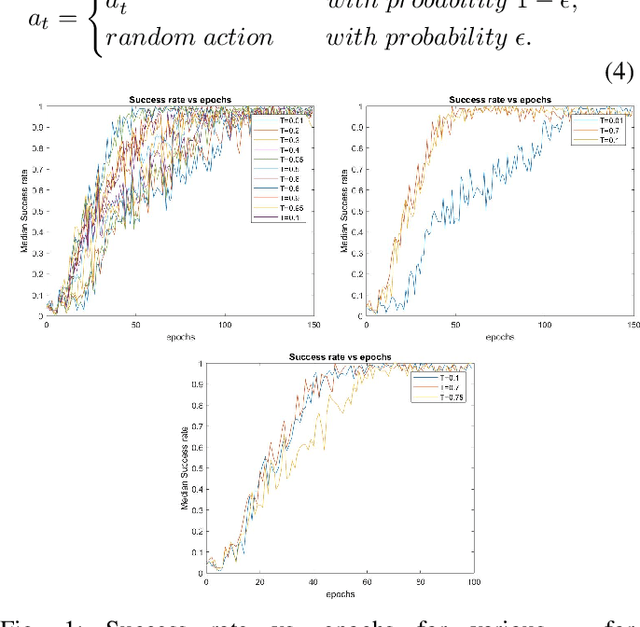
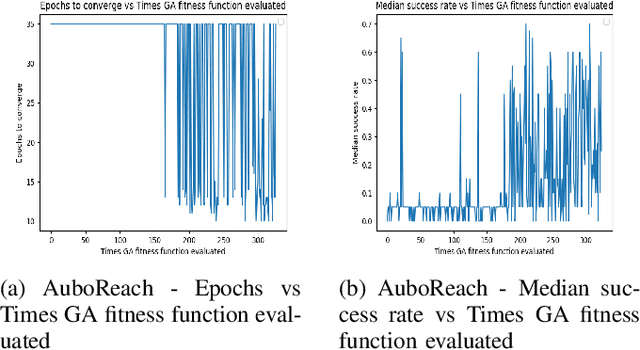
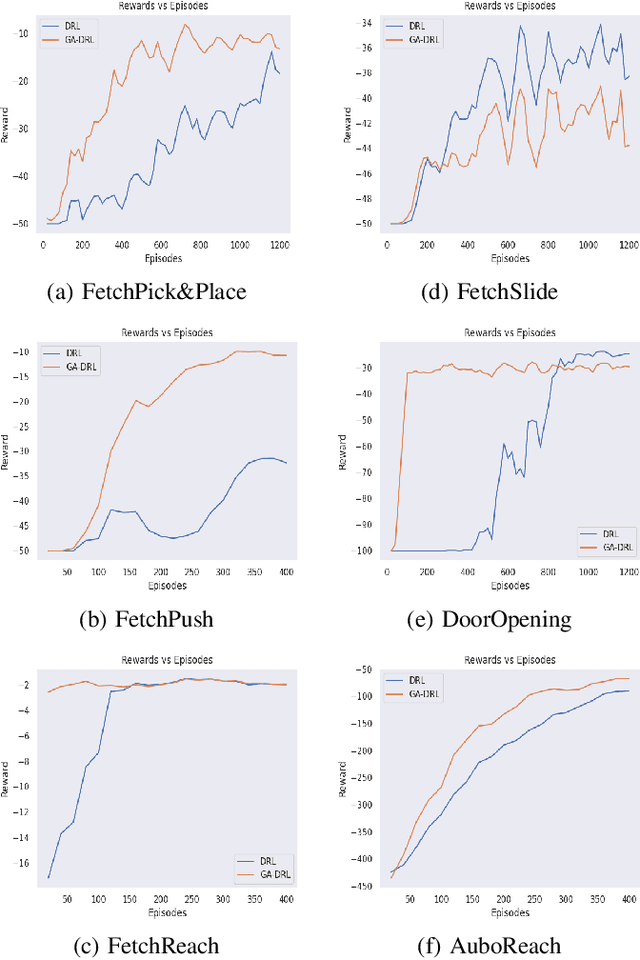
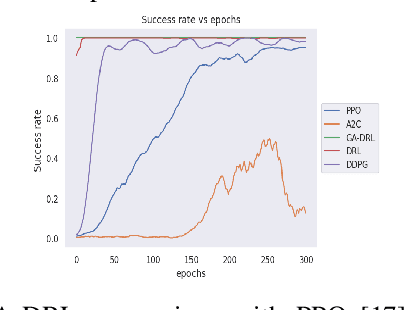
Reinforcement learning (RL) enables agents to make a decision based on a reward function. However, in the process of learning, the choice of values for learning algorithm parameters can significantly impact the overall learning process. In this paper, we proposed a Genetic Algorithm-based Deep Deterministic Policy Gradient and Hindsight Experience Replay method (called GA-DRL) to find near-optimal values of learning parameters. We used the proposed GA-DRL method on fetch-reach, slide, push, pick and place, and door opening in robotic manipulation tasks. With some modifications, our proposed GA-DRL method was also applied to the auboreach environment. Our experimental evaluation shows that our method leads to significantly better performance, faster than the original algorithm. Also, we provide evidence that GA-DRL performs better than the existing methods.