 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre We Ready For An Agent-Native Memory System?
Jun 23, 2026Memory for large language model (LLM) agents has rapidly evolved from simple retrieval-augmented mechanisms into a data management system that supports persistent information storage, retrieval, update, consolidation, and dynamic lifecycle governance throughout agent execution. Despite this evolution, existing evaluations still benchmark agent memory mainly through end-to-end task success metrics (e.g., F1, BLEU), while treating the underlying system as a monolithic black box. As a result, critical system-level concerns, including operational costs, architectural trade-offs across memory modules, and robustness under dynamic knowledge updates, remain insufficiently explored. In this paper, we present a systematic experimental study of agent memory from a data management perspective. We propose an analytical framework that decomposes agent memory into four core modules: memory representation and storage, extraction, retrieval and routing, and maintenance. Under this framework, we evaluate 12 representative memory systems and two reference baselines across five benchmark workloads spanning 11 datasets. Our extensive end-to-end evaluation shows that no single architecture dominates across all scenarios; instead, effectiveness depends heavily on how well the memory structure aligns with the workload bottleneck. Furthermore, through fine-grained ablation studies, we quantify their individual effects on representation fidelity, retrieval precision, update correctness, and long-horizon stability. Finally, we reveal cost-performance trade-offs under realistic workloads, showing localized maintenance is more cost-efficient than global reorganization. Based on these findings, we identify promising directions towards building truly agent-native memory systems. The code is publicly available at https://github.com/OpenDataBox/MemoryData.
SPHERE: Mitigating the Loss of Spectral Plasticity in Mixture-of-Experts for Deep Reinforcement Learning
May 06, 2026In deep reinforcement learning (DRL), an agent is trained from a stream of experience. In a continual learning setting, such agents can suffer from plasticity loss: their ability to learn new skills from new experiences diminishes over training. Recently, Mixture-of-Experts (MoE) networks have been reported to enable scaling laws and facilitate the learning of diverse skills. However, in continual reinforcement learning settings, their performance can degenerate as learning proceeds, indicating a loss of plasticity. To address this, building on Neural Tangent Kernel (NTK) theory, we formalize the plasticity loss in MoE policies as a loss of spectral plasticity. We then derive a tractable proxy for spectral plasticity, one expressible in terms of individual expert feature matrices. Leveraging this proxy, we introduce SPHERE, a practical Parseval penalty tailored for MoE-based policies that alleviates the loss of spectral plasticity. On MetaWorld and HumanoidBench, SPHERE improves average success under continual RL by 133% and 50% over an unregularized MoE baseline, while maintaining higher spectral plasticity throughout training.
HGP-Mamba: Integrating Histology and Generated Protein Features for Mamba-based Multimodal Survival Risk Prediction
Mar 17, 2026Recent advances in multimodal learning have significantly improved cancer survival risk prediction. However, the joint prognostic potential of protein markers and histopathology images remains underexplored, largely due to the high cost and limited availability of protein expression profiling. To address this challenge, we propose HGP-Mamba, a Mamba-based multimodal framework that efficiently integrates histological with generated protein features for survival risk prediction. Specifically, we introduce a protein feature extractor (PFE) that leverages pretrained foundation models to derive high-throughput protein embeddings directly from Whole Slide Images (WSIs), enabling data-efficient incorporation of molecular information. Together with histology embeddings that capture morphological patterns, we further introduce the Local Interaction-aware Mamba (LiAM) for fine-grained feature interaction and the Global Interaction-enhanced Mamba (GiEM) to promote holistic modality fusion at the slide level, thus capture complex cross-modal dependencies. Experiments on four public cancer datasets demonstrate that HGP-Mamba achieves state-of-the-art performance while maintaining superior computational efficiency compared with existing methods. Our source code is publicly available at <a href="https://github.com/Daijing-ai/HGP-Mamba.git">this https URL</a>.
Video2LoRA: Unified Semantic-Controlled Video Generation via Per-Reference-Video LoRA
Mar 10, 2026Achieving semantic alignment across diverse video generation conditions remains a significant challenge. Methods that rely on explicit structural guidance often enforce rigid spatial constraints that limit semantic flexibility, whereas models tailored for individual control types lack interoperability and adaptability. These design bottlenecks hinder progress toward flexible and efficient semantic video generation. To address this, we propose Video2LoRA, a scalable and generalizable framework for semantic-controlled video generation that conditions on a reference video. Video2LoRA employs a lightweight hypernetwork to predict personalized LoRA weights for each semantic input, which are combined with auxiliary matrices to form adaptive LoRA modules integrated into a frozen diffusion backbone. This design enables the model to generate videos consistent with the reference semantics while preserving key style and content variations, eliminating the need for any per-condition training. Notably, the final model weights less than 150MB, making it highly efficient for storage and deployment. Video2LoRA achieves coherent, semantically aligned generation across diverse conditions and exhibits strong zero-shot generalization to unseen semantics.
MVR: Multi-view Video Reward Shaping for Reinforcement Learning
Mar 02, 2026Reward design is of great importance for solving complex tasks with reinforcement learning. Recent studies have explored using image-text similarity produced by vision-language models (VLMs) to augment rewards of a task with visual feedback. A common practice linearly adds VLM scores to task or success rewards without explicit shaping, potentially altering the optimal policy. Moreover, such approaches, often relying on single static images, struggle with tasks whose desired behavior involves complex, dynamic motions spanning multiple visually different states. Furthermore, single viewpoints can occlude critical aspects of an agent's behavior. To address these issues, this paper presents Multi-View Video Reward Shaping (MVR), a framework that models the relevance of states regarding the target task using videos captured from multiple viewpoints. MVR leverages video-text similarity from a frozen pre-trained VLM to learn a state relevance function that mitigates the bias towards specific static poses inherent in image-based methods. Additionally, we introduce a state-dependent reward shaping formulation that integrates task-specific rewards and VLM-based guidance, automatically reducing the influence of VLM guidance once the desired motion pattern is achieved. We confirm the efficacy of the proposed framework with extensive experiments on challenging humanoid locomotion tasks from HumanoidBench and manipulation tasks from MetaWorld, verifying the design choices through ablation studies.
MMNavAgent: Multi-Magnification WSI Navigation Agent for Clinically Consistent Whole-Slide Analysis
Mar 02, 2026Recent AI navigation approaches aim to improve Whole-Slide Image (WSI) diagnosis by modeling spatial exploration and selecting diagnostically relevant regions, yet most operate at a single fixed magnification or rely on predefined magnification traversal. In clinical practice, pathologists examine slides across multiple magnifications and selectively inspect only necessary scales, dynamically integrating global and cellular evidence in a sequential manner. This mismatch prevents existing methods from modeling cross-magnification interactions and adaptive magnification selection inherent to real diagnostic workflows. To these, we propose a clinically consistent Multi-Magnification WSI Navigation Agent (MMNavAgent) that explicitly models multi magnification interaction and adaptive magnification selection. Specifically, we introduce a Cross-Magnification navigation Tool (CMT) that aggregates contextual information from adjacent magnifications to enhance discriminative representations along the navigation path. We further introduce a Magnification Selection Tool (MST) that leverages memory-driven reasoning within the agent framework to enable interactive and adaptive magnification selection, mimicking the sequential decision process of pathologists. Extensive experiments on a public dataset demonstrate improved diagnostic performance, with 1.45% gain of AUC and 2.93% gain of BACC over a non-agent baseline. Code will be public upon acceptance.
Multi-modal Knowledge Decomposition based Online Distillation for Biomarker Prediction in Breast Cancer Histopathology
Aug 24, 2025Immunohistochemical (IHC) biomarker prediction benefits from multi-modal data fusion analysis. However, the simultaneous acquisition of multi-modal data, such as genomic and pathological information, is often challenging due to cost or technical limitations. To address this challenge, we propose an online distillation approach based on Multi-modal Knowledge Decomposition (MKD) to enhance IHC biomarker prediction in haematoxylin and eosin (H\&E) stained histopathology images. This method leverages paired genomic-pathology data during training while enabling inference using either pathology slides alone or both modalities. Two teacher and one student models are developed to extract modality-specific and modality-general features by minimizing the MKD loss. To maintain the internal structural relationships between samples, Similarity-preserving Knowledge Distillation (SKD) is applied. Additionally, Collaborative Learning for Online Distillation (CLOD) facilitates mutual learning between teacher and student models, encouraging diverse and complementary learning dynamics. Experiments on the TCGA-BRCA and in-house QHSU datasets demonstrate that our approach achieves superior performance in IHC biomarker prediction using uni-modal data. Our code is available at https://github.com/qiyuanzz/MICCAI2025_MKD.
Towards Efficient Deep Spiking Neural Networks Construction with Spiking Activity based Pruning
Jun 03, 2024



The emergence of deep and large-scale spiking neural networks (SNNs) exhibiting high performance across diverse complex datasets has led to a need for compressing network models due to the presence of a significant number of redundant structural units, aiming to more effectively leverage their low-power consumption and biological interpretability advantages. Currently, most model compression techniques for SNNs are based on unstructured pruning of individual connections, which requires specific hardware support. Hence, we propose a structured pruning approach based on the activity levels of convolutional kernels named Spiking Channel Activity-based (SCA) network pruning framework. Inspired by synaptic plasticity mechanisms, our method dynamically adjusts the network's structure by pruning and regenerating convolutional kernels during training, enhancing the model's adaptation to the current target task. While maintaining model performance, this approach refines the network architecture, ultimately reducing computational load and accelerating the inference process. This indicates that structured dynamic sparse learning methods can better facilitate the application of deep SNNs in low-power and high-efficiency scenarios.
INSIGHT: End-to-End Neuro-Symbolic Visual Reinforcement Learning with Language Explanations
Mar 19, 2024Neuro-symbolic reinforcement learning (NS-RL) has emerged as a promising paradigm for explainable decision-making, characterized by the interpretability of symbolic policies. For tasks with visual observations, NS-RL entails structured representations for states, but previous algorithms are unable to refine the structured states with reward signals due to a lack of efficiency. Accessibility is also an issue, as extensive domain knowledge is required to interpret current symbolic policies. In this paper, we present a framework that is capable of learning structured states and symbolic policies simultaneously, whose key idea is to overcome the efficiency bottleneck by distilling vision foundation models into a scalable perception module. Moreover, we design a pipeline that uses large language models to generate concise and readable language explanations for policies and decisions. In experiments on nine Atari tasks, our approach demonstrates substantial performance gains over existing NSRL methods. We also showcase explanations for policies and decisions.
Multi-Agent Reinforcement Learning for Connected and Automated Vehicles Control: Recent Advancements and Future Prospects
Dec 18, 2023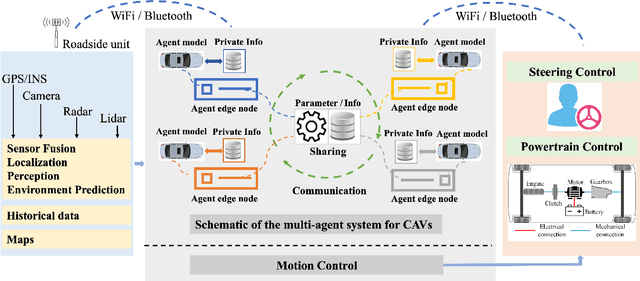
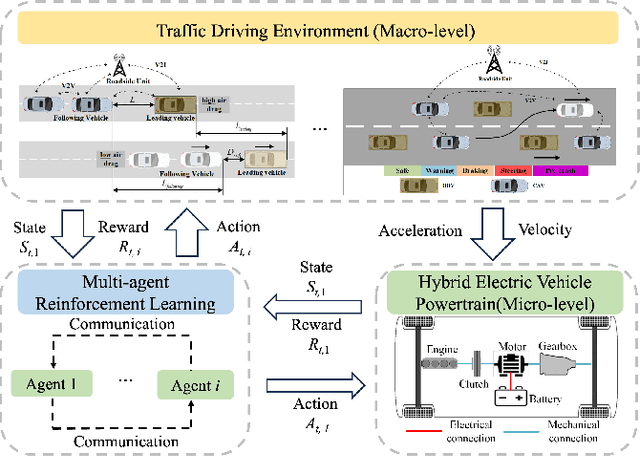
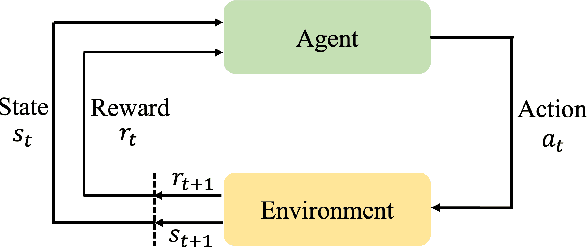
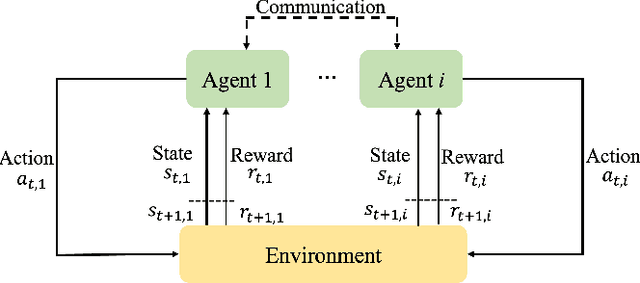
Connected and automated vehicles (CAVs) have emerged as a potential solution to the future challenges of developing safe, efficient, and eco-friendly transportation systems. However, CAV control presents significant challenges, given the complexity of interconnectivity and coordination required among the vehicles. To address this, multi-agent reinforcement learning (MARL), with its notable advancements in addressing complex problems in autonomous driving, robotics, and human-vehicle interaction, has emerged as a promising tool for enhancing the capabilities of CAVs. However, there is a notable absence of current reviews on the state-of-the-art MARL algorithms in the context of CAVs. Therefore, this paper delivers a comprehensive review of the application of MARL techniques within the field of CAV control. The paper begins by introducing MARL, followed by a detailed explanation of its unique advantages in addressing complex mobility and traffic scenarios that involve multiple agents. It then presents a comprehensive survey of MARL applications on the extent of control dimensions for CAVs, covering critical and typical scenarios such as platooning control, lane-changing, and unsignalized intersections. In addition, the paper provides a comprehensive review of the prominent simulation platforms used to create reliable environments for training in MARL. Lastly, the paper examines the current challenges associated with deploying MARL within CAV control and outlines potential solutions that can effectively overcome these issues. Through this review, the study highlights the tremendous potential of MARL to enhance the performance and collaboration of CAV control in terms of safety, travel efficiency, and economy.