 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributional Soft Actor-Critic with Diffusion Policy
Jul 02, 2025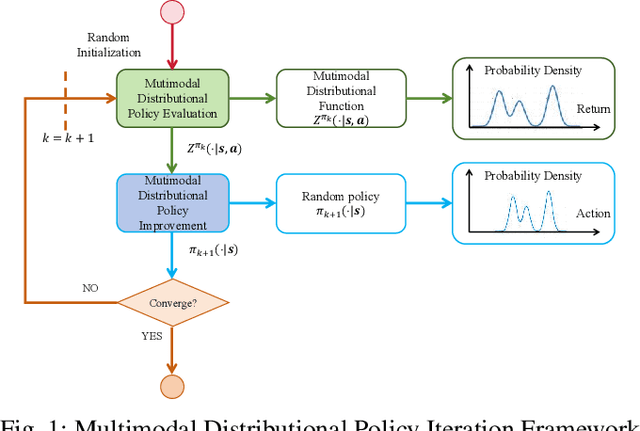
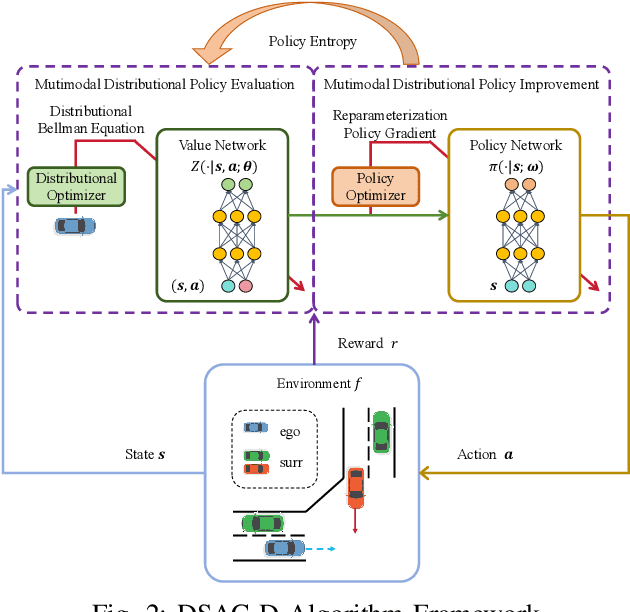
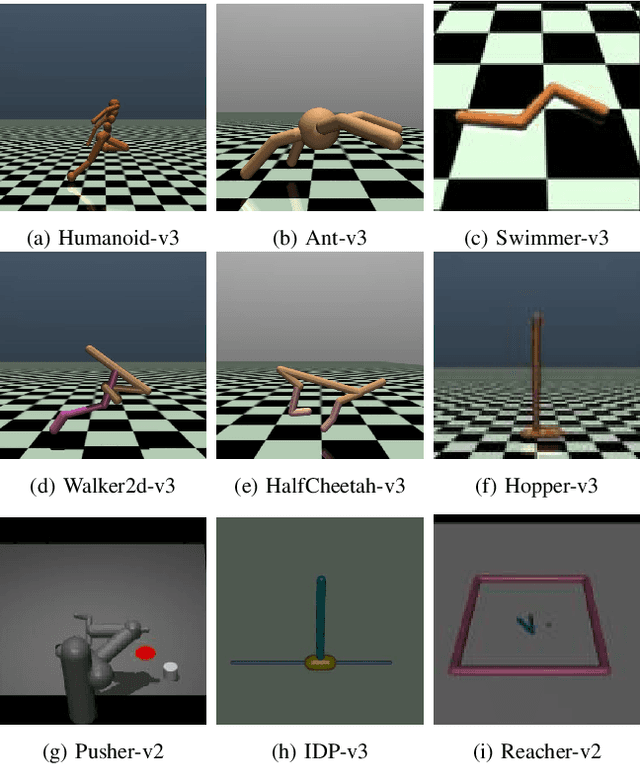
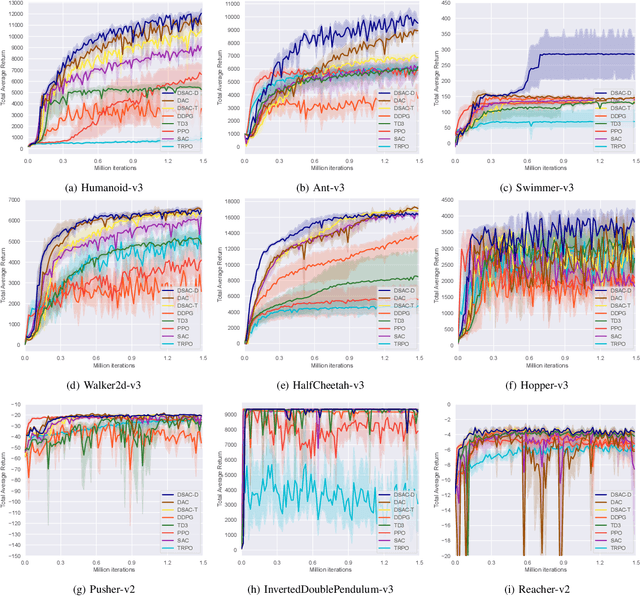
Reinforcement learning has been proven to be highly effective in handling complex control tasks. Traditional methods typically use unimodal distributions, such as Gaussian distributions, to model the output of value distributions. However, unimodal distribution often and easily causes bias in value function estimation, leading to poor algorithm performance. This paper proposes a distributional reinforcement learning algorithm called DSAC-D (Distributed Soft Actor Critic with Diffusion Policy) to address the challenges of estimating bias in value functions and obtaining multimodal policy representations. A multimodal distributional policy iteration framework that can converge to the optimal policy was established by introducing policy entropy and value distribution function. A diffusion value network that can accurately characterize the distribution of multi peaks was constructed by generating a set of reward samples through reverse sampling using a diffusion model. Based on this, a distributional reinforcement learning algorithm with dual diffusion of the value network and the policy network was derived. MuJoCo testing tasks demonstrate that the proposed algorithm not only learns multimodal policy, but also achieves state-of-the-art (SOTA) performance in all 9 control tasks, with significant suppression of estimation bias and total average return improvement of over 10\% compared to existing mainstream algorithms. The results of real vehicle testing show that DSAC-D can accurately characterize the multimodal distribution of different driving styles, and the diffusion policy network can characterize multimodal trajectories.
Recent Progress in Energy Management of Connected Hybrid Electric Vehicles Using Reinforcement Learning
Aug 28, 2023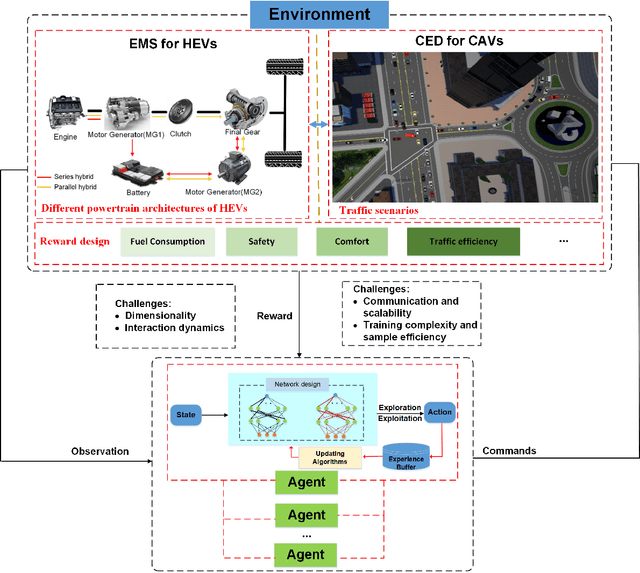
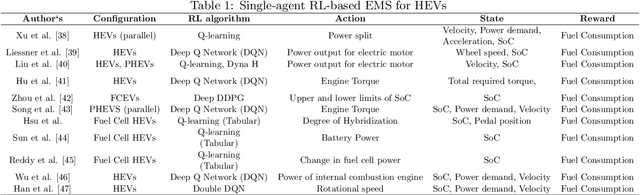
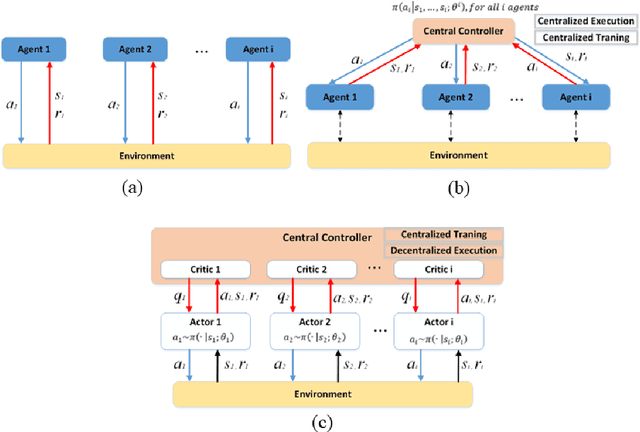
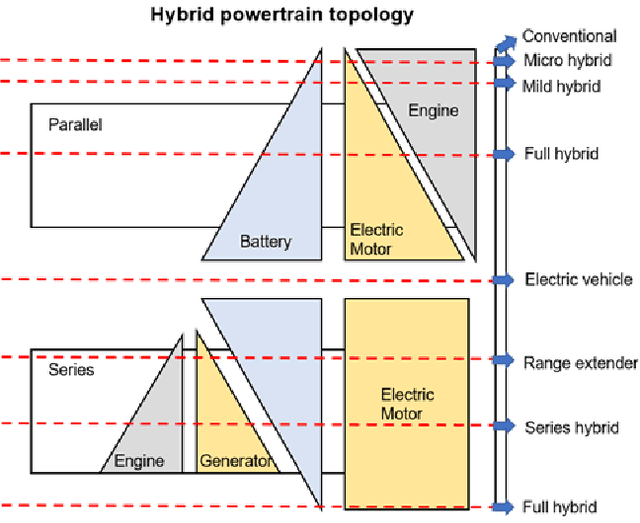
The growing adoption of hybrid electric vehicles (HEVs) presents a transformative opportunity for revolutionizing transportation energy systems. The shift towards electrifying transportation aims to curb environmental concerns related to fossil fuel consumption. This necessitates efficient energy management systems (EMS) to optimize energy efficiency. The evolution of EMS from HEVs to connected hybrid electric vehicles (CHEVs) represent a pivotal shift. For HEVs, EMS now confronts the intricate energy cooperation requirements of CHEVs, necessitating advanced algorithms for route optimization, charging coordination, and load distribution. Challenges persist in both domains, including optimal energy utilization for HEVs, and cooperative eco-driving control (CED) for CHEVs across diverse vehicle types. Reinforcement learning (RL) stands out as a promising tool for addressing these challenges at hand. Specifically, within the realm of CHEVs, the application of multi-agent reinforcement learning (MARL) emerges as a powerful approach for effectively tackling the intricacies of CED control. Despite extensive research, few reviews span from individual vehicles to multi-vehicle scenarios. This review bridges the gap, highlighting challenges, advancements, and potential contributions of RL-based solutions for future sustainable transportation systems.
Study on the Impacts of Hazardous Behaviors on Autonomous Vehicle Collision Rates Based on Humanoid Scenario Generation in CARLA
Jul 15, 2023



Testing of function safety and Safety Of The Intended Functionality (SOTIF) is important for autonomous vehicles (AVs). It is hard to test the AV's hazard response in the real world because it would involve hazards to passengers and other road users. This paper studied on virtual testing of AV on the CARLA platform and proposed a Humanoid Scenario Generation (HSG) scheme to investigate the impacts of hazardous behaviors on AV collision rates. The HSG scheme breakthrough the current limitation on the rarity and reproducibility of real scenes. By accurately capturing five prominent human driver behaviors that directly contribute to vehicle collisions in the real world, the methodology significantly enhances the realism and diversity of the simulation, as evidenced by collision rate statistics across various traffic scenarios. Thus, the modular framework allows for customization, and its seamless integration within the CARLA platform ensures compatibility with existing tools. Ultimately, the comparison results demonstrate that all vehicles that exhibited hazardous behaviors followed the predefined random speed distribution and the effectiveness of the HSG was validated by the distinct characteristics displayed by these behaviors.
Optimal Energy Management of Plug-in Hybrid Vehicles Through Exploration-to-Exploitation Ratio Control in Ensemble Reinforcement Learning
Mar 15, 2023Developing intelligent energy management systems with high adaptability and superiority is necessary and significant for Hybrid Electric Vehicles (HEVs). This paper proposed an ensemble learning-based scheme based on a learning automata module (LAM) to enhance vehicle energy efficiency. Two parallel base learners following two exploration-to-exploitation ratios (E2E) methods are used to generate an optimal solution, and the final action is jointly determined by the LAM using three ensemble methods. 'Reciprocal function-based decay' (RBD) and 'Step-based decay' (SBD) are proposed respectively to generate E2E ratio trajectories based on conventional Exponential decay (EXD) functions of reinforcement learning. Furthermore, considering the different performances of three decay functions, an optimal combination with the RBD, SBD, and EXD is employed to determine the ultimate action. Experiments are carried out in software-in-loop (SiL) and hardware-in-the-loop (HiL) to validate the potential performance of energy-saving under four predefined cycles. The SiL test demonstrates that the ensemble learning system with an optimal combination can achieve 1.09$\%$ higher vehicle energy efficiency than a single Q-learning strategy with the EXD function. In the HiL test, the ensemble learning system with an optimal combination can save more than 1.04$\%$ in the predefined real-world driving condition than the single Q-learning scheme based on the EXD function.