 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Management of Multi-mode Plug-in Hybrid Electric Vehicle using Multi-agent Deep Reinforcement Learning
Mar 16, 2023



The recently emerging multi-mode plug-in hybrid electric vehicle (PHEV) technology is one of the pathways making contributions to decarbonization, and its energy management requires multiple-input and multiple-output (MIMO) control. At the present, the existing methods usually decouple the MIMO control into single-output (MISO) control and can only achieve its local optimal performance. To optimize the multi-mode vehicle globally, this paper studies a MIMO control method for energy management of the multi-mode PHEV based on multi-agent deep reinforcement learning (MADRL). By introducing a relevance ratio, a hand-shaking strategy is proposed to enable two learning agents to work collaboratively under the MADRL framework using the deep deterministic policy gradient (DDPG) algorithm. Unified settings for the DDPG agents are obtained through a sensitivity analysis of the influencing factors to the learning performance. The optimal working mode for the hand-shaking strategy is attained through a parametric study on the relevance ratio. The advantage of the proposed energy management method is demonstrated on a software-in-the-loop testing platform. The result of the study indiates that learning rate of the DDPG agents is the greatest factor in learning performance. Using the unified DDPG settings and a relevance ratio of 0.2, the proposed MADRL method can save up to 4% energy compared to the single-agent method.
Multi-agent Deep Reinforcement Learning for Charge-sustaining Control of Multi-mode Hybrid Vehicles
Sep 06, 2022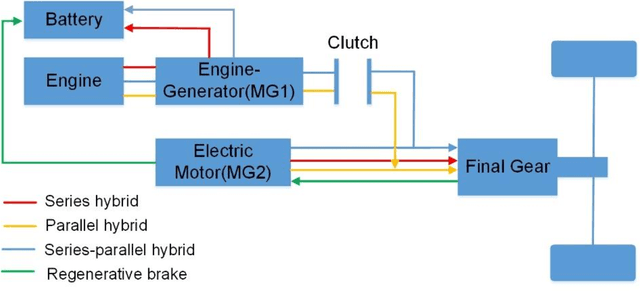
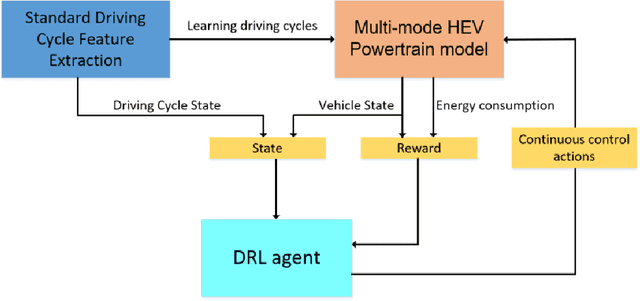
Transportation electrification requires an increasing number of electric components (e.g., electric motors and electric energy storage systems) on vehicles, and control of the electric powertrains usually involves multiple inputs and multiple outputs (MIMO). This paper focused on the online optimization of energy management strategy for a multi-mode hybrid electric vehicle based on multi-agent reinforcement learning (MARL) algorithms that aim to address MIMO control optimization while most existing methods only deal with single output control. A new collaborative cyber-physical learning with multi-agents is proposed based on the analysis of the evolution of energy efficiency of the multi-mode hybrid electric vehicle (HEV) optimized by a deep deterministic policy gradient (DDPG)-based MARL algorithm. Then a learning driving cycle is set by a novel random method to speed up the training process. Eventually, network design, learning rate, and policy noise are incorporated in the sensibility analysis and the DDPG-based algorithm parameters are determined, and the learning performance with the different relationships of multi-agents is studied and demonstrates that the not completely independent relationship with Ratio 0.2 is the best. The compassion study with the single-agent and multi-agent suggests that the multi-agent can achieve approximately 4% improvement of total energy over the single-agent scheme. Therefore, the multi-objective control by MARL can achieve good optimization effects and application efficiency.