 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Manipulation Exoskeleton: Learning Compliant Whole-body Policies with Real-time Torque Feedback
Jun 12, 2026For robots to work safely in household environments, they need to be compliant and react to torque and force feedback during contact. However, the majority of existing data collection pipelines still lack the ability to capture force and torque data for learning active compliant policies. In this paper, we present Universal Manipulation Exoskeleton (UME), an upper-limb exoskeleton that provides real-time haptic torque feedback while recording whole-arm configurations and joint torque signals for teleoperation. With transparent torque feedback, human operators can even unsheathe kinematically constrained objects while blindfolded. UME is low-cost, lightweight, and portable. Equipped with an embedded IMU, it enables teleoperation for mobile manipulation. With our proposed universal retargeting algorithm, UME can teleoperate a range of robots, including the 7DoF OpenArm, 7DoF Franka, and 6DoF X-ARM. We demonstrate that this combination of capabilities enables learning bimanual, whole-body, and active compliant policies that operate effectively in highly constrained spaces. The learned robust autonomous policies achieve high success rates across a variety of tasks, including long-horizon mobile manipulation, force-mediated box flipping, visually occluded box pushing, and space-constrained tabletop manipulation. Videos, code, and additional information can be found at https://ume-exo.github.io.
Dynamic Modeling and Robust Gait Optimization of a Compliant Worm Robot
Apr 13, 2026Worm-inspired robots provide an effective locomotion strategy for constrained environments by combining cyclic body deformation with alternating anchoring. For compliant robots, however, the interaction between deformable anchoring structures and the environment makes predictive modeling and deployable gait optimization challenging. This paper presents an experimentally grounded modeling and optimization framework for a compliant worm robot capable of traversing corrugated pipes. First, a hybrid dynamic locomotion model is derived, in which the robot motion is represented by continuous dynamics within a corrugation groove and discrete switching of anchoring positions between adjacent grooves. A slack-aware actuation model is further introduced to map the commanded gait input to the realized body-length change, and an energy model is developed based on physics and calibrated with empirical power measurement. Based on these models, a multi-objective gait optimization problem is formulated to maximize average speed while minimizing average power. To reduce the fragility of nominal boundary-seeking solutions, a kinematic robustness margin is introduced into the anchoring-transition conditions, leading to a margin-based robust gait optimization framework. Experimental results show that the proposed framework captures the dominant locomotion and energy-consumption behavior of the robot over the tested conditions, and enables robust gait optimization for achieving speed-power trade-off.
A Novel Modular Cable-Driven Soft Robotic Arm with Multi-Segment Reconfigurability
Mar 04, 2026This paper presents a novel, modular, cable-driven soft robotic arm featuring multi-segment reconfigurability. The proposed architecture enables a stackable system with independent segment control, allowing scalable adaptation to diverse structural and application requirements. The system is fabricated from soft silicone material and incorporates embedded tendon-routing channels with a protective dual-helical tendon structure. Experimental results showed that modular stacking substantially expanded the reachable workspace: relative to the single-segment arm, the three-segment configuration achieved up to a 13-fold increase in planar workspace area and a 38.9-fold increase in workspace volume. Furthermore, this study investigated the effect of silicone stiffness on actuator performance. The results revealed a clear trade-off between compliance and stiffness: softer silicone improved bending flexibility, while stiffer silicone improved structural rigidity and load-bearing stability. These results highlight the potential of stiffness tuning to balance compliance and strength for configuring scalable, reconfigurable soft robotic arms.
A Survey on 3D Reconstruction Techniques in Plant Phenotyping: From Classical Methods to Neural Radiance Fields (NeRF), 3D Gaussian Splatting (3DGS), and Beyond
Apr 30, 2025Plant phenotyping plays a pivotal role in understanding plant traits and their interactions with the environment, making it crucial for advancing precision agriculture and crop improvement. 3D reconstruction technologies have emerged as powerful tools for capturing detailed plant morphology and structure, offering significant potential for accurate and automated phenotyping. This paper provides a comprehensive review of the 3D reconstruction techniques for plant phenotyping, covering classical reconstruction methods, emerging Neural Radiance Fields (NeRF), and the novel 3D Gaussian Splatting (3DGS) approach. Classical methods, which often rely on high-resolution sensors, are widely adopted due to their simplicity and flexibility in representing plant structures. However, they face challenges such as data density, noise, and scalability. NeRF, a recent advancement, enables high-quality, photorealistic 3D reconstructions from sparse viewpoints, but its computational cost and applicability in outdoor environments remain areas of active research. The emerging 3DGS technique introduces a new paradigm in reconstructing plant structures by representing geometry through Gaussian primitives, offering potential benefits in both efficiency and scalability. We review the methodologies, applications, and performance of these approaches in plant phenotyping and discuss their respective strengths, limitations, and future prospects (https://github.com/JiajiaLi04/3D-Reconstruction-Plants). Through this review, we aim to provide insights into how these diverse 3D reconstruction techniques can be effectively leveraged for automated and high-throughput plant phenotyping, contributing to the next generation of agricultural technology.
Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired Curvature
Apr 25, 2025Soft robots, distinguished by their inherent compliance and continuum structures, present unique modeling challenges, especially when subjected to significant external loads such as gravity and payloads. In this study, we introduce an innovative data-driven modeling framework leveraging an Euler spiral-inspired shape representations to accurately describe the complex shapes of soft continuum actuators. Based on this representation, we develop neural network-based forward and inverse models to effectively capture the nonlinear behavior of a fiber-reinforced pneumatic bending actuator. Our forward model accurately predicts the actuator's deformation given inputs of pressure and payload, while the inverse model reliably estimates payloads from observed actuator shapes and known pressure inputs. Comprehensive experimental validation demonstrates the effectiveness and accuracy of our proposed approach. Notably, the augmented Euler spiral-based forward model achieves low average positional prediction errors of 3.38%, 2.19%, and 1.93% of the actuator length at the one-third, two-thirds, and tip positions, respectively. Furthermore, the inverse model demonstrates precision of estimating payloads with an average error as low as 0.72% across the tested range. These results underscore the potential of our method to significantly enhance the accuracy and predictive capabilities of modeling frameworks for soft robotic systems.
Back-stepping Experience Replay with Application to Model-free Reinforcement Learning for a Soft Snake Robot
Jan 21, 2024In this paper, we propose a novel technique, Back-stepping Experience Replay (BER), that is compatible with arbitrary off-policy reinforcement learning (RL) algorithms. BER aims to enhance learning efficiency in systems with approximate reversibility, reducing the need for complex reward shaping. The method constructs reversed trajectories using back-stepping transitions to reach random or fixed targets. Interpretable as a bi-directional approach, BER addresses inaccuracies in back-stepping transitions through a distillation of the replay experience during learning. Given the intricate nature of soft robots and their complex interactions with environments, we present an application of BER in a model-free RL approach for the locomotion and navigation of a soft snake robot, which is capable of serpentine motion enabled by anisotropic friction between the body and ground. In addition, a dynamic simulator is developed to assess the effectiveness and efficiency of the BER algorithm, in which the robot demonstrates successful learning (reaching a 100% success rate) and adeptly reaches random targets, achieving an average speed 48% faster than that of the best baseline approach.
Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Jan 12, 2024We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$\%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
Multi-Agent Reinforcement Learning for Connected and Automated Vehicles Control: Recent Advancements and Future Prospects
Dec 18, 2023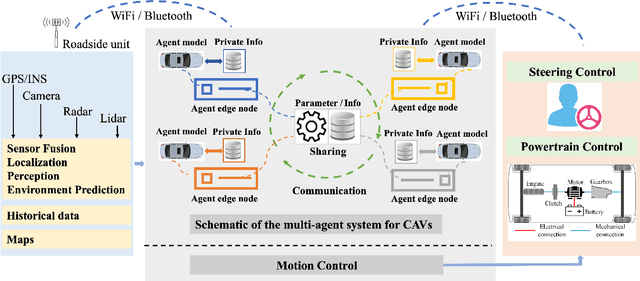
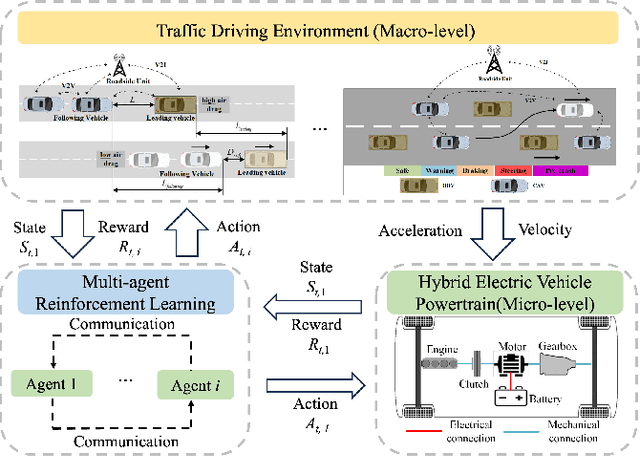
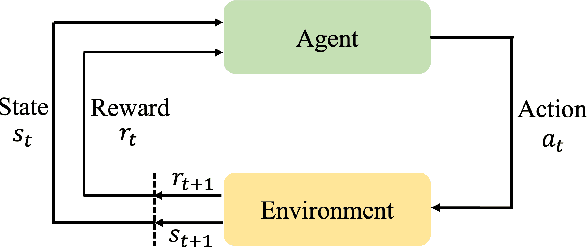
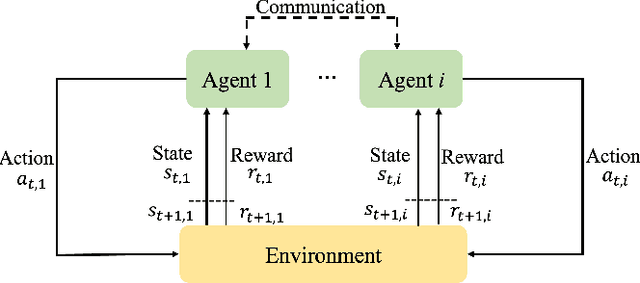
Connected and automated vehicles (CAVs) have emerged as a potential solution to the future challenges of developing safe, efficient, and eco-friendly transportation systems. However, CAV control presents significant challenges, given the complexity of interconnectivity and coordination required among the vehicles. To address this, multi-agent reinforcement learning (MARL), with its notable advancements in addressing complex problems in autonomous driving, robotics, and human-vehicle interaction, has emerged as a promising tool for enhancing the capabilities of CAVs. However, there is a notable absence of current reviews on the state-of-the-art MARL algorithms in the context of CAVs. Therefore, this paper delivers a comprehensive review of the application of MARL techniques within the field of CAV control. The paper begins by introducing MARL, followed by a detailed explanation of its unique advantages in addressing complex mobility and traffic scenarios that involve multiple agents. It then presents a comprehensive survey of MARL applications on the extent of control dimensions for CAVs, covering critical and typical scenarios such as platooning control, lane-changing, and unsignalized intersections. In addition, the paper provides a comprehensive review of the prominent simulation platforms used to create reliable environments for training in MARL. Lastly, the paper examines the current challenges associated with deploying MARL within CAV control and outlines potential solutions that can effectively overcome these issues. Through this review, the study highlights the tremendous potential of MARL to enhance the performance and collaboration of CAV control in terms of safety, travel efficiency, and economy.
Label-Efficient Learning in Agriculture: A Comprehensive Review
May 24, 2023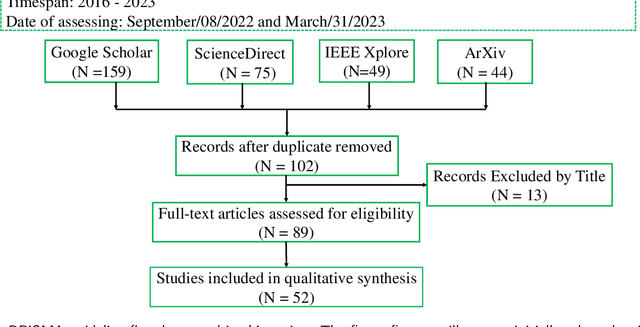
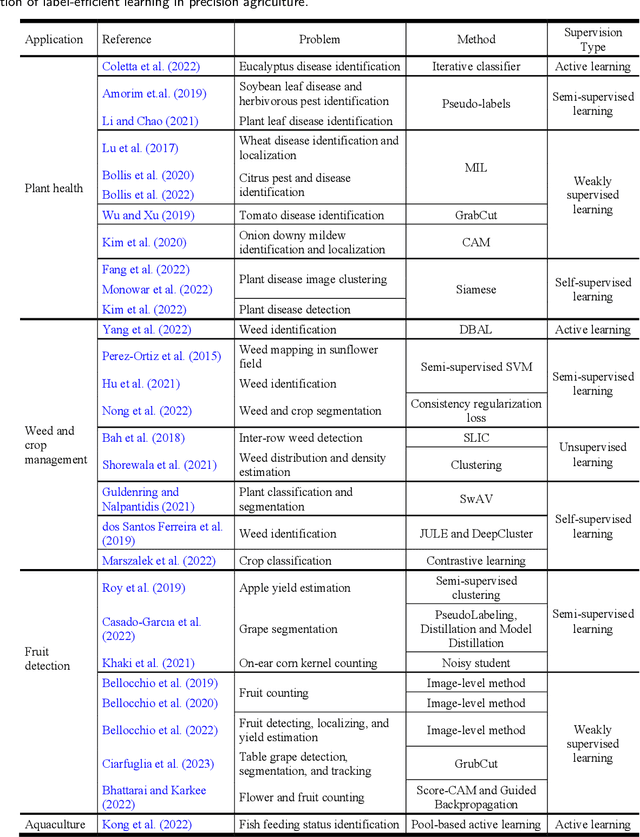
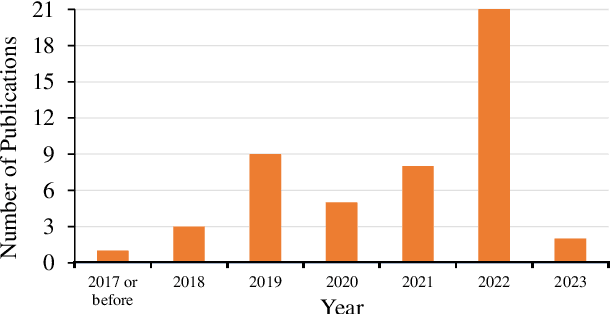
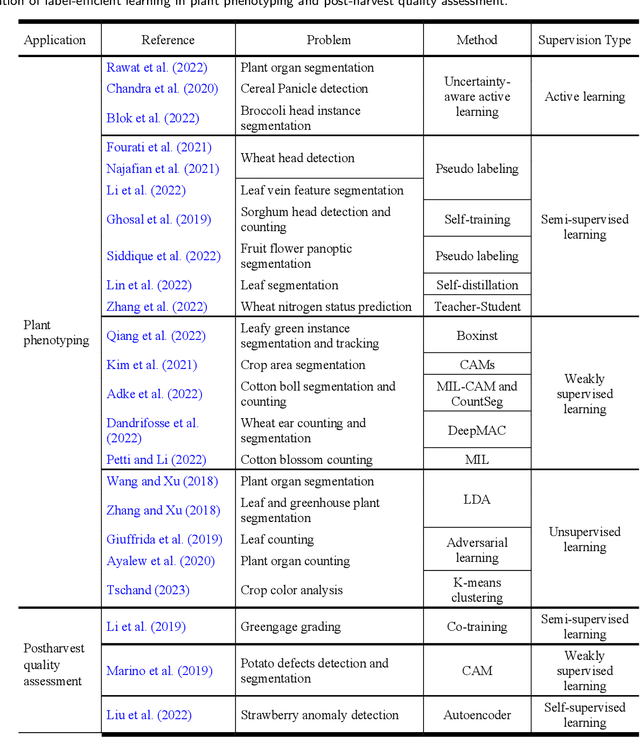
The past decade has witnessed many great successes of machine learning (ML) and deep learning (DL) applications in agricultural systems, including weed control, plant disease diagnosis, agricultural robotics, and precision livestock management. Despite tremendous progresses, one downside of such ML/DL models is that they generally rely on large-scale labeled datasets for training, and the performance of such models is strongly influenced by the size and quality of available labeled data samples. In addition, collecting, processing, and labeling such large-scale datasets is extremely costly and time-consuming, partially due to the rising cost in human labor. Therefore, developing label-efficient ML/DL methods for agricultural applications has received significant interests among researchers and practitioners. In fact, there are more than 50 papers on developing and applying deep-learning-based label-efficient techniques to address various agricultural problems since 2016, which motivates the authors to provide a timely and comprehensive review of recent label-efficient ML/DL methods in agricultural applications. To this end, we first develop a principled taxonomy to organize these methods according to the degree of supervision, including weak supervision (i.e., active learning and semi-/weakly- supervised learning), and no supervision (i.e., un-/self- supervised learning), supplemented by representative state-of-the-art label-efficient ML/DL methods. In addition, a systematic review of various agricultural applications exploiting these label-efficient algorithms, such as precision agriculture, plant phenotyping, and postharvest quality assessment, is presented. Finally, we discuss the current problems and challenges, as well as future research directions. A well-classified paper list can be accessed at https://github.com/DongChen06/Label-efficient-in-Agriculture.
Deep Data Augmentation for Weed Recognition Enhancement: A Diffusion Probabilistic Model and Transfer Learning Based Approach
Oct 18, 2022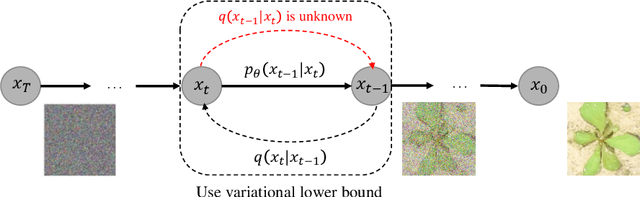
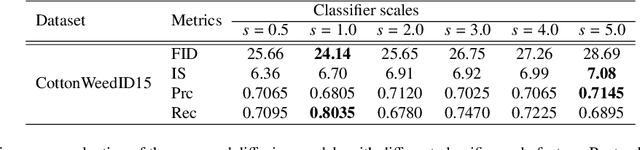
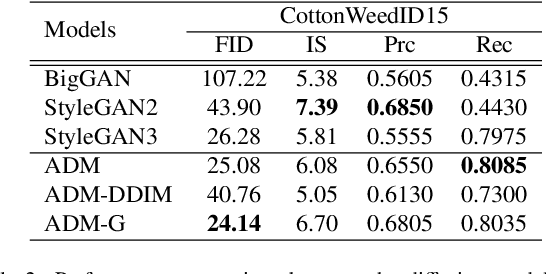
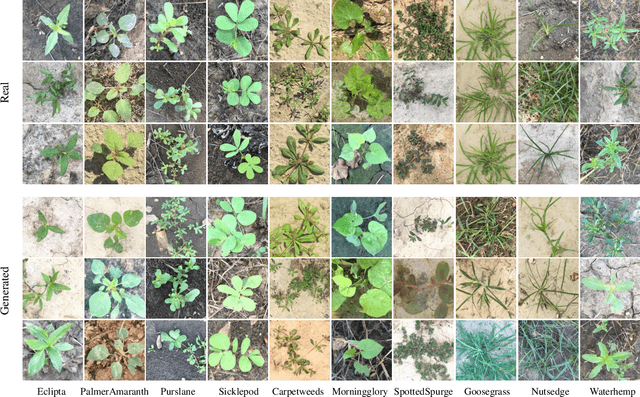
Weed management plays an important role in many modern agricultural applications. Conventional weed control methods mainly rely on chemical herbicides or hand weeding, which are often cost-ineffective, environmentally unfriendly, or even posing a threat to food safety and human health. Recently, automated/robotic weeding using machine vision systems has seen increased research attention with its potential for precise and individualized weed treatment. However, dedicated, large-scale, and labeled weed image datasets are required to develop robust and effective weed identification systems but they are often difficult and expensive to obtain. To address this issue, data augmentation approaches, such as generative adversarial networks (GANs), have been explored to generate highly realistic images for agricultural applications. Yet, despite some progress, those approaches are often complicated to train or have difficulties preserving fine details in images. In this paper, we present the first work of applying diffusion probabilistic models (also known as diffusion models) to generate high-quality synthetic weed images based on transfer learning. Comprehensive experimental results show that the developed approach consistently outperforms several state-of-the-art GAN models, representing the best trade-off between sample fidelity and diversity and highest FID score on a common weed dataset, CottonWeedID15. In addition, the expanding dataset with synthetic weed images can apparently boost model performance on four deep learning (DL) models for the weed classification tasks. Furthermore, the DL models trained on CottonWeedID15 dataset with only 10% of real images and 90% of synthetic weed images achieve a testing accuracy of over 94%, showing high-quality of the generated weed samples. The codes of this study are made publicly available at https://github.com/DongChen06/DMWeeds.