 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNL2Repo-Bench: Towards Long-Horizon Repository Generation Evaluation of Coding Agents
Dec 14, 2025Recent advances in coding agents suggest rapid progress toward autonomous software development, yet existing benchmarks fail to rigorously evaluate the long-horizon capabilities required to build complete software systems. Most prior evaluations focus on localized code generation, scaffolded completion, or short-term repair tasks, leaving open the question of whether agents can sustain coherent reasoning, planning, and execution over the extended horizons demanded by real-world repository construction. To address this gap, we present NL2Repo Bench, a benchmark explicitly designed to evaluate the long-horizon repository generation ability of coding agents. Given only a single natural-language requirements document and an empty workspace, agents must autonomously design the architecture, manage dependencies, implement multi-module logic, and produce a fully installable Python library. Our experiments across state-of-the-art open- and closed-source models reveal that long-horizon repository generation remains largely unsolved: even the strongest agents achieve below 40% average test pass rates and rarely complete an entire repository correctly. Detailed analysis uncovers fundamental long-horizon failure modes, including premature termination, loss of global coherence, fragile cross-file dependencies, and inadequate planning over hundreds of interaction steps. NL2Repo Bench establishes a rigorous, verifiable testbed for measuring sustained agentic competence and highlights long-horizon reasoning as a central bottleneck for the next generation of autonomous coding agents.
Velocity-Form Data-Enabled Predictive Control of Soft Robots under Unknown External Payloads
Oct 06, 2025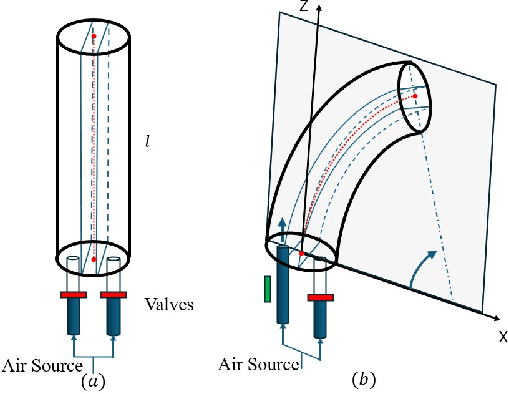
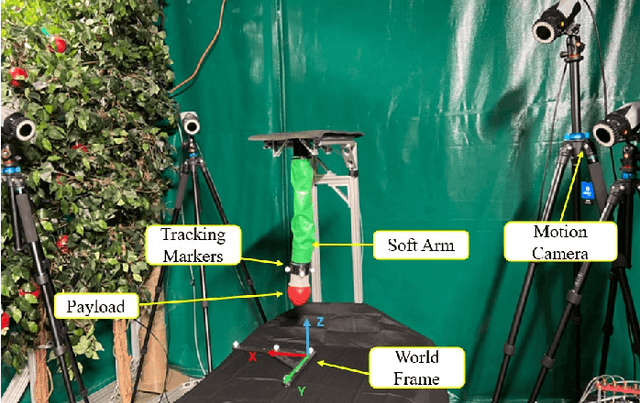
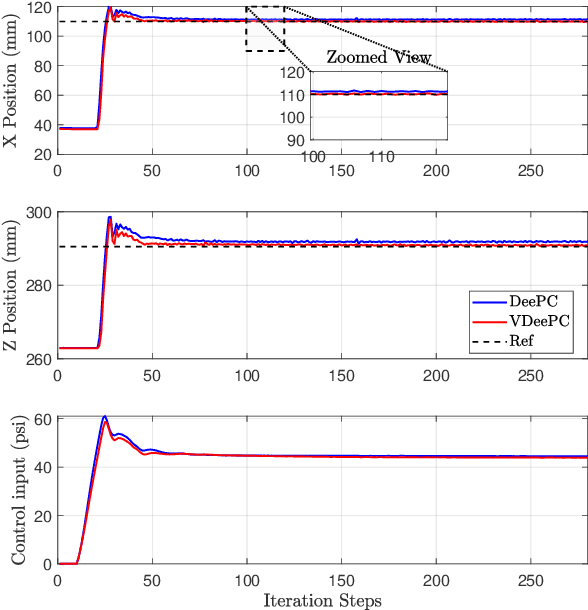
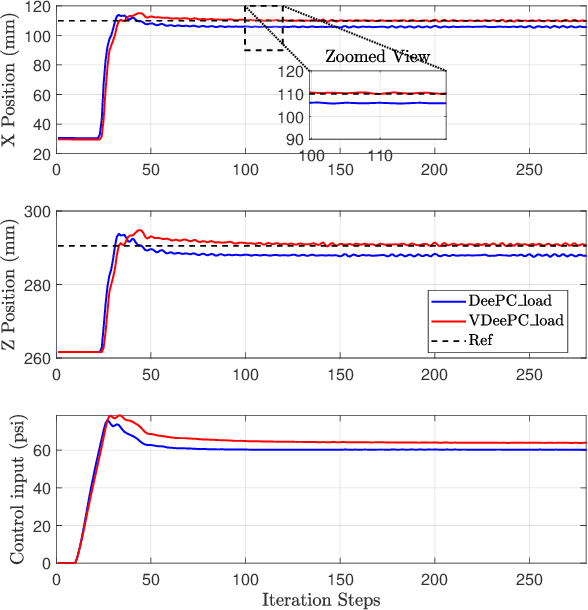
Data-driven control methods such as data-enabled predictive control (DeePC) have shown strong potential in efficient control of soft robots without explicit parametric models. However, in object manipulation tasks, unknown external payloads and disturbances can significantly alter the system dynamics and behavior, leading to offset error and degraded control performance. In this paper, we present a novel velocity-form DeePC framework that achieves robust and optimal control of soft robots under unknown payloads. The proposed framework leverages input-output data in an incremental representation to mitigate performance degradation induced by unknown payloads, eliminating the need for weighted datasets or disturbance estimators. We validate the method experimentally on a planar soft robot and demonstrate its superior performance compared to standard DeePC in scenarios involving unknown payloads.
GUI-ReWalk: Massive Data Generation for GUI Agent via Stochastic Exploration and Intent-Aware Reasoning
Sep 19, 2025Graphical User Interface (GUI) Agents, powered by large language and vision-language models, hold promise for enabling end-to-end automation in digital environments. However, their progress is fundamentally constrained by the scarcity of scalable, high-quality trajectory data. Existing data collection strategies either rely on costly and inconsistent manual annotations or on synthetic generation methods that trade off between diversity and meaningful task coverage. To bridge this gap, we present GUI-ReWalk: a reasoning-enhanced, multi-stage framework for synthesizing realistic and diverse GUI trajectories. GUI-ReWalk begins with a stochastic exploration phase that emulates human trial-and-error behaviors, and progressively transitions into a reasoning-guided phase where inferred goals drive coherent and purposeful interactions. Moreover, it supports multi-stride task generation, enabling the construction of long-horizon workflows across multiple applications. By combining randomness for diversity with goal-aware reasoning for structure, GUI-ReWalk produces data that better reflects the intent-aware, adaptive nature of human-computer interaction. We further train Qwen2.5-VL-7B on the GUI-ReWalk dataset and evaluate it across multiple benchmarks, including Screenspot-Pro, OSWorld-G, UI-Vision, AndroidControl, and GUI-Odyssey. Results demonstrate that GUI-ReWalk enables superior coverage of diverse interaction flows, higher trajectory entropy, and more realistic user intent. These findings establish GUI-ReWalk as a scalable and data-efficient framework for advancing GUI agent research and enabling robust real-world automation.
Advancement and Field Evaluation of a Dual-arm Apple Harvesting Robot
Jun 06, 2025Apples are among the most widely consumed fruits worldwide. Currently, apple harvesting fully relies on manual labor, which is costly, drudging, and hazardous to workers. Hence, robotic harvesting has attracted increasing attention in recent years. However, existing systems still fall short in terms of performance, effectiveness, and reliability for complex orchard environments. In this work, we present the development and evaluation of a dual-arm harvesting robot. The system integrates a ToF camera, two 4DOF robotic arms, a centralized vacuum system, and a post-harvest handling module. During harvesting, suction force is dynamically assigned to either arm via the vacuum system, enabling efficient apple detachment while reducing power consumption and noise. Compared to our previous design, we incorporated a platform movement mechanism that enables both in-out and up-down adjustments, enhancing the robot's dexterity and adaptability to varying canopy structures. On the algorithmic side, we developed a robust apple localization pipeline that combines a foundation-model-based detector, segmentation, and clustering-based depth estimation, which improves performance in orchards. Additionally, pressure sensors were integrated into the system, and a novel dual-arm coordination strategy was introduced to respond to harvest failures based on sensor feedback, further improving picking efficiency. Field demos were conducted in two commercial orchards in MI, USA, with different canopy structures. The system achieved success rates of 0.807 and 0.797, with an average picking cycle time of 5.97s. The proposed strategy reduced harvest time by 28% compared to a single-arm baseline. The dual-arm harvesting robot enhances the reliability and efficiency of apple picking. With further advancements, the system holds strong potential for autonomous operation and commercialization for the apple industry.
A Survey on 3D Reconstruction Techniques in Plant Phenotyping: From Classical Methods to Neural Radiance Fields (NeRF), 3D Gaussian Splatting (3DGS), and Beyond
Apr 30, 2025Plant phenotyping plays a pivotal role in understanding plant traits and their interactions with the environment, making it crucial for advancing precision agriculture and crop improvement. 3D reconstruction technologies have emerged as powerful tools for capturing detailed plant morphology and structure, offering significant potential for accurate and automated phenotyping. This paper provides a comprehensive review of the 3D reconstruction techniques for plant phenotyping, covering classical reconstruction methods, emerging Neural Radiance Fields (NeRF), and the novel 3D Gaussian Splatting (3DGS) approach. Classical methods, which often rely on high-resolution sensors, are widely adopted due to their simplicity and flexibility in representing plant structures. However, they face challenges such as data density, noise, and scalability. NeRF, a recent advancement, enables high-quality, photorealistic 3D reconstructions from sparse viewpoints, but its computational cost and applicability in outdoor environments remain areas of active research. The emerging 3DGS technique introduces a new paradigm in reconstructing plant structures by representing geometry through Gaussian primitives, offering potential benefits in both efficiency and scalability. We review the methodologies, applications, and performance of these approaches in plant phenotyping and discuss their respective strengths, limitations, and future prospects (https://github.com/JiajiaLi04/3D-Reconstruction-Plants). Through this review, we aim to provide insights into how these diverse 3D reconstruction techniques can be effectively leveraged for automated and high-throughput plant phenotyping, contributing to the next generation of agricultural technology.
Data-Enabled Neighboring Extremal: Case Study on Model-Free Trajectory Tracking for Robotic Arm
Apr 09, 2025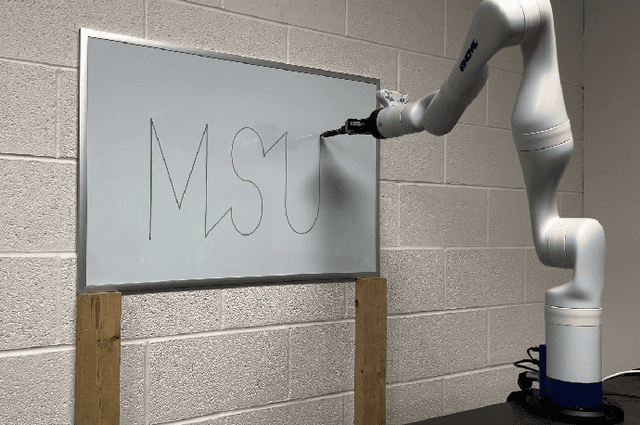
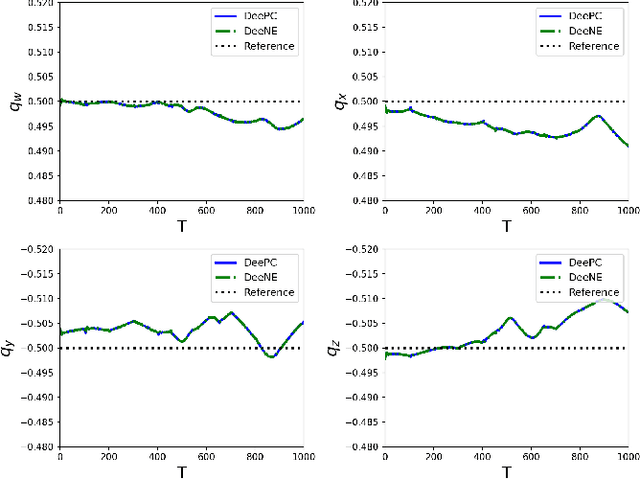
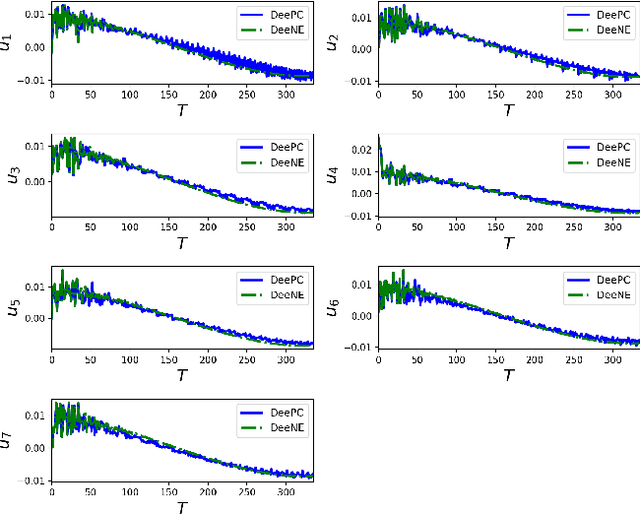
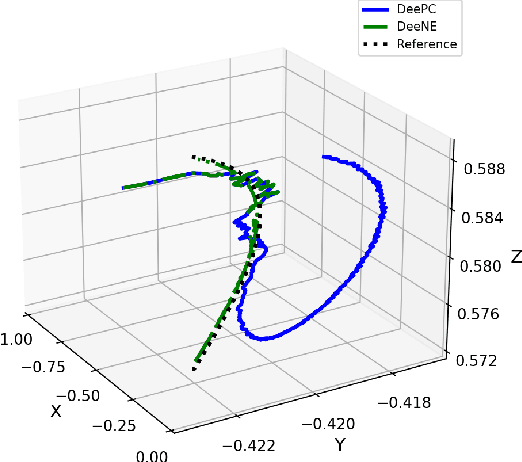
Data-enabled predictive control (DeePC) has recently emerged as a powerful data-driven approach for efficient system controls with constraints handling capabilities. It performs optimal controls by directly harnessing input-output (I/O) data, bypassing the process of explicit model identification that can be costly and time-consuming. However, its high computational complexity, driven by a large-scale optimization problem (typically in a higher dimension than its model-based counterpart--Model Predictive Control), hinders real-time applications. To overcome this limitation, we propose the data-enabled neighboring extremal (DeeNE) framework, which significantly reduces computational cost while preserving control performance. DeeNE leverages first-order optimality perturbation analysis to efficiently update a precomputed nominal DeePC solution in response to changes in initial conditions and reference trajectories. We validate its effectiveness on a 7-DoF KINOVA Gen3 robotic arm, demonstrating substantial computational savings and robust, data-driven control performance.
Foundation Model-Based Apple Ripeness and Size Estimation for Selective Harvesting
Feb 03, 2025

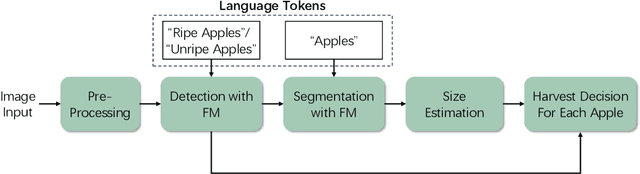
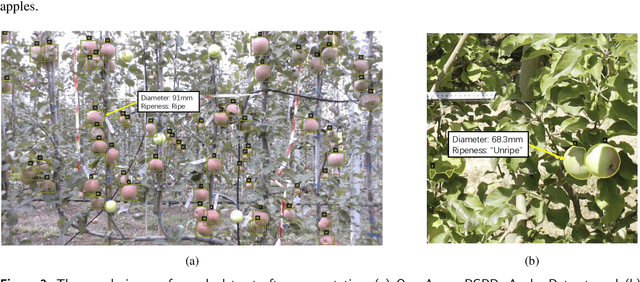
Harvesting is a critical task in the tree fruit industry, demanding extensive manual labor and substantial costs, and exposing workers to potential hazards. Recent advances in automated harvesting offer a promising solution by enabling efficient, cost-effective, and ergonomic fruit picking within tight harvesting windows. However, existing harvesting technologies often indiscriminately harvest all visible and accessible fruits, including those that are unripe or undersized. This study introduces a novel foundation model-based framework for efficient apple ripeness and size estimation. Specifically, we curated two public RGBD-based Fuji apple image datasets, integrating expanded annotations for ripeness ("Ripe" vs. "Unripe") based on fruit color and image capture dates. The resulting comprehensive dataset, Fuji-Ripeness-Size Dataset, includes 4,027 images and 16,257 annotated apples with ripeness and size labels. Using Grounding-DINO, a language-model-based object detector, we achieved robust apple detection and ripeness classification, outperforming other state-of-the-art models. Additionally, we developed and evaluated six size estimation algorithms, selecting the one with the lowest error and variation for optimal performance. The Fuji-Ripeness-Size Dataset and the apple detection and size estimation algorithms are made publicly available, which provides valuable benchmarks for future studies in automated and selective harvesting.
UI-TARS: Pioneering Automated GUI Interaction with Native Agents
Jan 21, 2025This paper introduces UI-TARS, a native GUI agent model that solely perceives the screenshots as input and performs human-like interactions (e.g., keyboard and mouse operations). Unlike prevailing agent frameworks that depend on heavily wrapped commercial models (e.g., GPT-4o) with expert-crafted prompts and workflows, UI-TARS is an end-to-end model that outperforms these sophisticated frameworks. Experiments demonstrate its superior performance: UI-TARS achieves SOTA performance in 10+ GUI agent benchmarks evaluating perception, grounding, and GUI task execution. Notably, in the OSWorld benchmark, UI-TARS achieves scores of 24.6 with 50 steps and 22.7 with 15 steps, outperforming Claude (22.0 and 14.9 respectively). In AndroidWorld, UI-TARS achieves 46.6, surpassing GPT-4o (34.5). UI-TARS incorporates several key innovations: (1) Enhanced Perception: leveraging a large-scale dataset of GUI screenshots for context-aware understanding of UI elements and precise captioning; (2) Unified Action Modeling, which standardizes actions into a unified space across platforms and achieves precise grounding and interaction through large-scale action traces; (3) System-2 Reasoning, which incorporates deliberate reasoning into multi-step decision making, involving multiple reasoning patterns such as task decomposition, reflection thinking, milestone recognition, etc. (4) Iterative Training with Reflective Online Traces, which addresses the data bottleneck by automatically collecting, filtering, and reflectively refining new interaction traces on hundreds of virtual machines. Through iterative training and reflection tuning, UI-TARS continuously learns from its mistakes and adapts to unforeseen situations with minimal human intervention. We also analyze the evolution path of GUI agents to guide the further development of this domain.
Performance Evaluation of Semi-supervised Learning Frameworks for Multi-Class Weed Detection
Mar 06, 2024Effective weed control plays a crucial role in optimizing crop yield and enhancing agricultural product quality. However, the reliance on herbicide application not only poses a critical threat to the environment but also promotes the emergence of resistant weeds. Fortunately, recent advances in precision weed management enabled by ML and DL provide a sustainable alternative. Despite great progress, existing algorithms are mainly developed based on supervised learning approaches, which typically demand large-scale datasets with manual-labeled annotations, which is time-consuming and labor-intensive. As such, label-efficient learning methods, especially semi-supervised learning, have gained increased attention in the broader domain of computer vision and have demonstrated promising performance. These methods aim to utilize a small number of labeled data samples along with a great number of unlabeled samples to develop high-performing models comparable to the supervised learning counterpart trained on a large amount of labeled data samples. In this study, we assess the effectiveness of a semi-supervised learning framework for multi-class weed detection, employing two well-known object detection frameworks, namely FCOS and Faster-RCNN. Specifically, we evaluate a generalized student-teacher framework with an improved pseudo-label generation module to produce reliable pseudo-labels for the unlabeled data. To enhance generalization, an ensemble student network is employed to facilitate the training process. Experimental results show that the proposed approach is able to achieve approximately 76\% and 96\% detection accuracy as the supervised methods with only 10\% of labeled data in CottenWeedDet3 and CottonWeedDet12, respectively. We offer access to the source code, contributing a valuable resource for ongoing semi-supervised learning research in weed detection and beyond.
Back-stepping Experience Replay with Application to Model-free Reinforcement Learning for a Soft Snake Robot
Jan 21, 2024In this paper, we propose a novel technique, Back-stepping Experience Replay (BER), that is compatible with arbitrary off-policy reinforcement learning (RL) algorithms. BER aims to enhance learning efficiency in systems with approximate reversibility, reducing the need for complex reward shaping. The method constructs reversed trajectories using back-stepping transitions to reach random or fixed targets. Interpretable as a bi-directional approach, BER addresses inaccuracies in back-stepping transitions through a distillation of the replay experience during learning. Given the intricate nature of soft robots and their complex interactions with environments, we present an application of BER in a model-free RL approach for the locomotion and navigation of a soft snake robot, which is capable of serpentine motion enabled by anisotropic friction between the body and ground. In addition, a dynamic simulator is developed to assess the effectiveness and efficiency of the BER algorithm, in which the robot demonstrates successful learning (reaching a 100% success rate) and adeptly reaches random targets, achieving an average speed 48% faster than that of the best baseline approach.