 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiSync: Spatio-Temporally Aligning Hand Motion from Wearable IMU and On-Robot Camera for Command Source Identification in Long-Range HRI
Mar 12, 2026Long-range Human-Robot Interaction (HRI) remains underexplored. Within it, Command Source Identification (CSI) - determining who issued a command - is especially challenging due to multi-user and distance-induced sensor ambiguity. We introduce HiSync, an optical-inertial fusion framework that treats hand motion as binding cues by aligning robot-mounted camera optical flow with hand-worn IMU signals. We first elicit a user-defined (N=12) gesture set and collect a multimodal command gesture dataset (N=38) in long-range multi-user HRI scenarios. Next, HiSync extracts frequency-domain hand motion features from both camera and IMU data, and a learned CSINet denoises IMU readings, temporally aligns modalities, and performs distance-aware multi-window fusion to compute cross-modal similarity of subtle, natural gestures, enabling robust CSI. In three-person scenes up to 34m, HiSync achieves 92.32% CSI accuracy, outperforming the prior SOTA by 48.44%. HiSync is also validated on real-robot deployment. By making CSI reliable and natural, HiSync provides a practical primitive and design guidance for public-space HRI.
Velocity-Form Data-Enabled Predictive Control of Soft Robots under Unknown External Payloads
Oct 06, 2025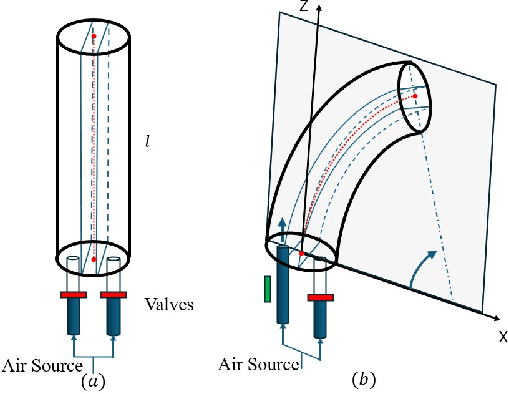
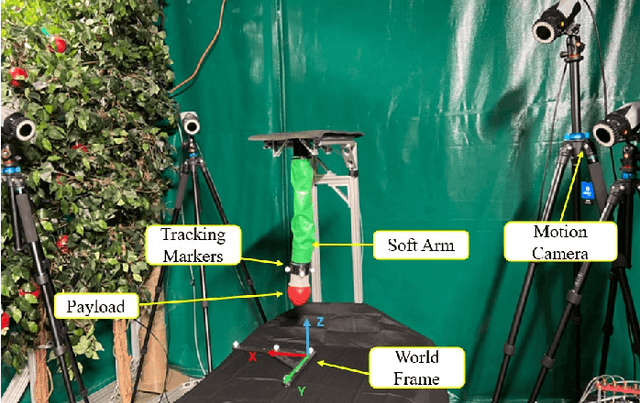
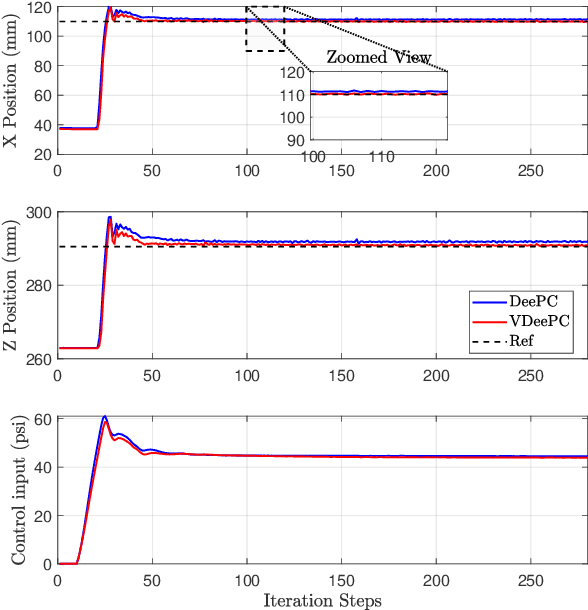
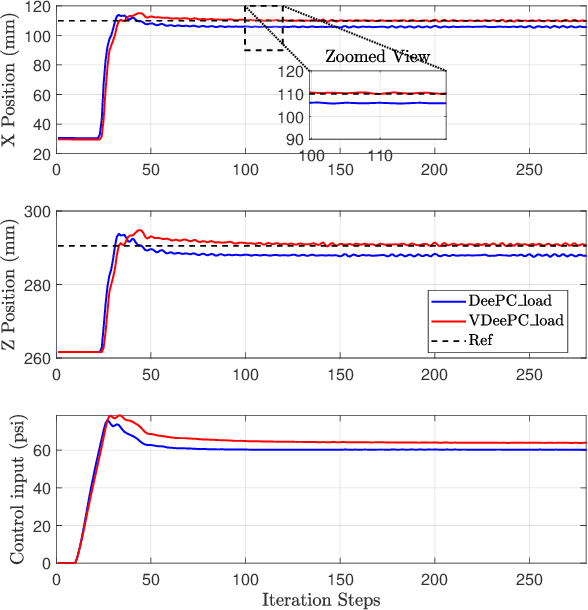
Data-driven control methods such as data-enabled predictive control (DeePC) have shown strong potential in efficient control of soft robots without explicit parametric models. However, in object manipulation tasks, unknown external payloads and disturbances can significantly alter the system dynamics and behavior, leading to offset error and degraded control performance. In this paper, we present a novel velocity-form DeePC framework that achieves robust and optimal control of soft robots under unknown payloads. The proposed framework leverages input-output data in an incremental representation to mitigate performance degradation induced by unknown payloads, eliminating the need for weighted datasets or disturbance estimators. We validate the method experimentally on a planar soft robot and demonstrate its superior performance compared to standard DeePC in scenarios involving unknown payloads.
Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired Curvature
Apr 25, 2025Soft robots, distinguished by their inherent compliance and continuum structures, present unique modeling challenges, especially when subjected to significant external loads such as gravity and payloads. In this study, we introduce an innovative data-driven modeling framework leveraging an Euler spiral-inspired shape representations to accurately describe the complex shapes of soft continuum actuators. Based on this representation, we develop neural network-based forward and inverse models to effectively capture the nonlinear behavior of a fiber-reinforced pneumatic bending actuator. Our forward model accurately predicts the actuator's deformation given inputs of pressure and payload, while the inverse model reliably estimates payloads from observed actuator shapes and known pressure inputs. Comprehensive experimental validation demonstrates the effectiveness and accuracy of our proposed approach. Notably, the augmented Euler spiral-based forward model achieves low average positional prediction errors of 3.38%, 2.19%, and 1.93% of the actuator length at the one-third, two-thirds, and tip positions, respectively. Furthermore, the inverse model demonstrates precision of estimating payloads with an average error as low as 0.72% across the tested range. These results underscore the potential of our method to significantly enhance the accuracy and predictive capabilities of modeling frameworks for soft robotic systems.
Fast Online Adaptive Neural MPC via Meta-Learning
Apr 24, 2025
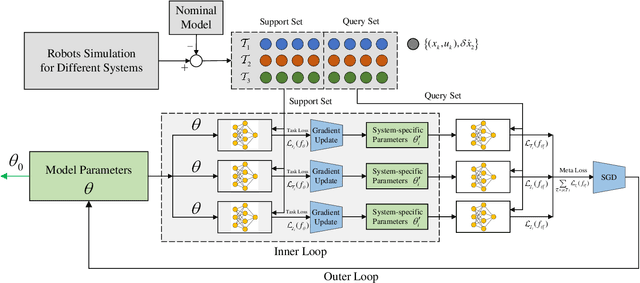

Data-driven model predictive control (MPC) has demonstrated significant potential for improving robot control performance in the presence of model uncertainties. However, existing approaches often require extensive offline data collection and computationally intensive training, limiting their ability to adapt online. To address these challenges, this paper presents a fast online adaptive MPC framework that leverages neural networks integrated with Model-Agnostic Meta-Learning (MAML). Our approach focuses on few-shot adaptation of residual dynamics - capturing the discrepancy between nominal and true system behavior - using minimal online data and gradient steps. By embedding these meta-learned residual models into a computationally efficient L4CasADi-based MPC pipeline, the proposed method enables rapid model correction, enhances predictive accuracy, and improves real-time control performance. We validate the framework through simulation studies on a Van der Pol oscillator, a Cart-Pole system, and a 2D quadrotor. Results show significant gains in adaptation speed and prediction accuracy over both nominal MPC and nominal MPC augmented with a freshly initialized neural network, underscoring the effectiveness of our approach for real-time adaptive robot control.
From Words to Molecules: A Survey of Large Language Models in Chemistry
Feb 02, 2024In recent years, Large Language Models (LLMs) have achieved significant success in natural language processing (NLP) and various interdisciplinary areas. However, applying LLMs to chemistry is a complex task that requires specialized domain knowledge. This paper provides a thorough exploration of the nuanced methodologies employed in integrating LLMs into the field of chemistry, delving into the complexities and innovations at this interdisciplinary juncture. Specifically, our analysis begins with examining how molecular information is fed into LLMs through various representation and tokenization methods. We then categorize chemical LLMs into three distinct groups based on the domain and modality of their input data, and discuss approaches for integrating these inputs for LLMs. Furthermore, this paper delves into the pretraining objectives with adaptations to chemical LLMs. After that, we explore the diverse applications of LLMs in chemistry, including novel paradigms for their application in chemistry tasks. Finally, we identify promising research directions, including further integration with chemical knowledge, advancements in continual learning, and improvements in model interpretability, paving the way for groundbreaking developments in the field.
Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Jan 12, 2024We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$\%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
A Fully Data-Driven Approach for Realistic Traffic Signal Control Using Offline Reinforcement Learning
Nov 27, 2023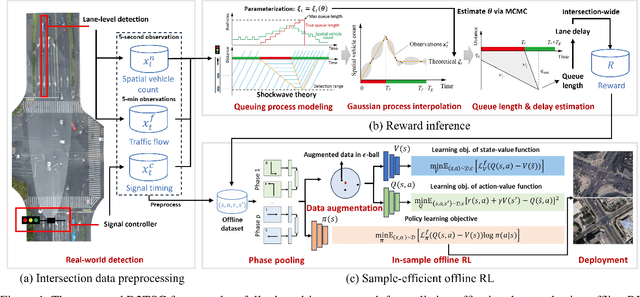
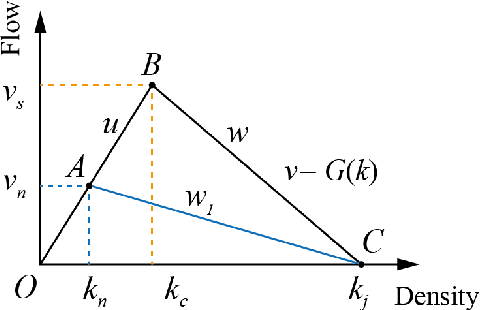
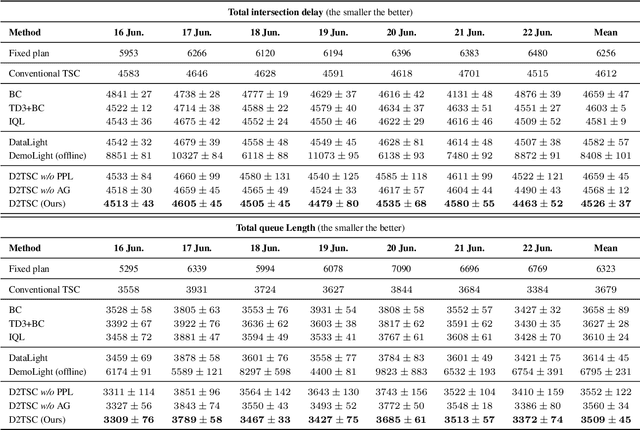
The optimization of traffic signal control (TSC) is critical for an efficient transportation system. In recent years, reinforcement learning (RL) techniques have emerged as a popular approach for TSC and show promising results for highly adaptive control. However, existing RL-based methods suffer from notably poor real-world applicability and hardly have any successful deployments. The reasons for such failures are mostly due to the reliance on over-idealized traffic simulators for policy optimization, as well as using unrealistic fine-grained state observations and reward signals that are not directly obtainable from real-world sensors. In this paper, we propose a fully Data-Driven and simulator-free framework for realistic Traffic Signal Control (D2TSC). Specifically, we combine well-established traffic flow theory with machine learning to construct a reward inference model to infer the reward signals from coarse-grained traffic data. With the inferred rewards, we further propose a sample-efficient offline RL method to enable direct signal control policy learning from historical offline datasets of real-world intersections. To evaluate our approach, we collect historical traffic data from a real-world intersection, and develop a highly customized simulation environment that strictly follows real data characteristics. We demonstrate through extensive experiments that our approach achieves superior performance over conventional and offline RL baselines, and also enjoys much better real-world applicability.
Irregular Traffic Time Series Forecasting Based on Asynchronous Spatio-Temporal Graph Convolutional Network
Sep 01, 2023



Accurate traffic forecasting at intersections governed by intelligent traffic signals is critical for the advancement of an effective intelligent traffic signal control system. However, due to the irregular traffic time series produced by intelligent intersections, the traffic forecasting task becomes much more intractable and imposes three major new challenges: 1) asynchronous spatial dependency, 2) irregular temporal dependency among traffic data, and 3) variable-length sequence to be predicted, which severely impede the performance of current traffic forecasting methods. To this end, we propose an Asynchronous Spatio-tEmporal graph convolutional nEtwoRk (ASeer) to predict the traffic states of the lanes entering intelligent intersections in a future time window. Specifically, by linking lanes via a traffic diffusion graph, we first propose an Asynchronous Graph Diffusion Network to model the asynchronous spatial dependency between the time-misaligned traffic state measurements of lanes. After that, to capture the temporal dependency within irregular traffic state sequence, a learnable personalized time encoding is devised to embed the continuous time for each lane. Then we propose a Transformable Time-aware Convolution Network that learns meta-filters to derive time-aware convolution filters with transformable filter sizes for efficient temporal convolution on the irregular sequence. Furthermore, a Semi-Autoregressive Prediction Network consisting of a state evolution unit and a semiautoregressive predictor is designed to effectively and efficiently predict variable-length traffic state sequences. Extensive experiments on two real-world datasets demonstrate the effectiveness of ASeer in six metrics.