 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fully Data-Driven Approach for Realistic Traffic Signal Control Using Offline Reinforcement Learning
Nov 27, 2023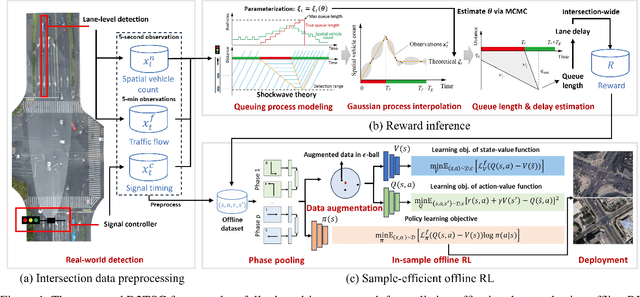
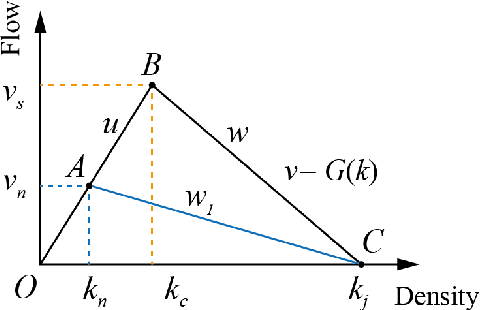
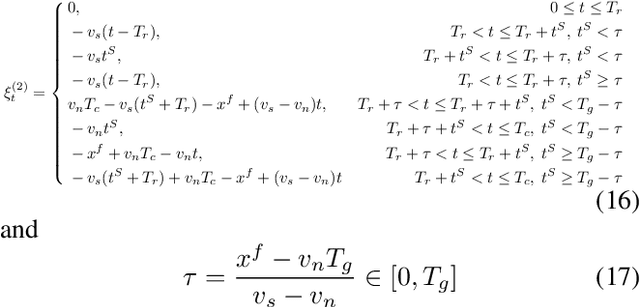
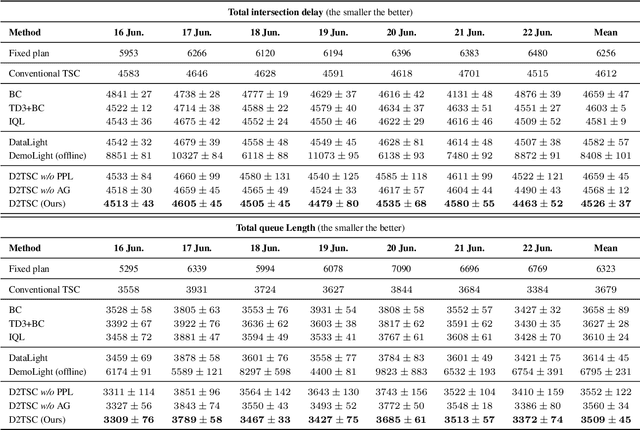
The optimization of traffic signal control (TSC) is critical for an efficient transportation system. In recent years, reinforcement learning (RL) techniques have emerged as a popular approach for TSC and show promising results for highly adaptive control. However, existing RL-based methods suffer from notably poor real-world applicability and hardly have any successful deployments. The reasons for such failures are mostly due to the reliance on over-idealized traffic simulators for policy optimization, as well as using unrealistic fine-grained state observations and reward signals that are not directly obtainable from real-world sensors. In this paper, we propose a fully Data-Driven and simulator-free framework for realistic Traffic Signal Control (D2TSC). Specifically, we combine well-established traffic flow theory with machine learning to construct a reward inference model to infer the reward signals from coarse-grained traffic data. With the inferred rewards, we further propose a sample-efficient offline RL method to enable direct signal control policy learning from historical offline datasets of real-world intersections. To evaluate our approach, we collect historical traffic data from a real-world intersection, and develop a highly customized simulation environment that strictly follows real data characteristics. We demonstrate through extensive experiments that our approach achieves superior performance over conventional and offline RL baselines, and also enjoys much better real-world applicability.
Progression-Guided Temporal Action Detection in Videos
Aug 18, 2023



We present a novel framework, Action Progression Network (APN), for temporal action detection (TAD) in videos. The framework locates actions in videos by detecting the action evolution process. To encode the action evolution, we quantify a complete action process into 101 ordered stages (0\%, 1\%, ..., 100\%), referred to as action progressions. We then train a neural network to recognize the action progressions. The framework detects action boundaries by detecting complete action processes in the videos, e.g., a video segment with detected action progressions closely follow the sequence 0\%, 1\%, ..., 100\%. The framework offers three major advantages: (1) Our neural networks are trained end-to-end, contrasting conventional methods that optimize modules separately; (2) The APN is trained using action frames exclusively, enabling models to be trained on action classification datasets and robust to videos with temporal background styles differing from those in training; (3) Our framework effectively avoids detecting incomplete actions and excels in detecting long-lasting actions due to the fine-grained and explicit encoding of the temporal structure of actions. Leveraging these advantages, the APN achieves competitive performance and significantly surpasses its counterparts in detecting long-lasting actions. With an IoU threshold of 0.5, the APN achieves a mean Average Precision (mAP) of 58.3\% on the THUMOS14 dataset and 98.9\% mAP on the DFMAD70 dataset.
TraffNet: Learning Causality of Traffic Generation for Road Network Digital Twins
Apr 01, 2023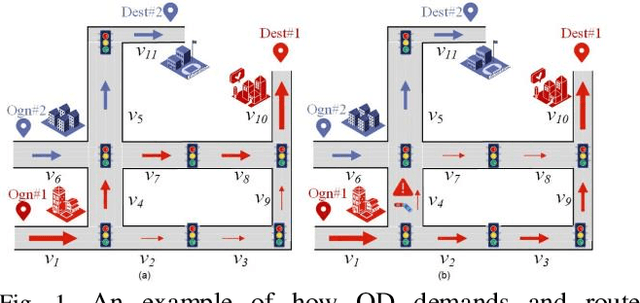
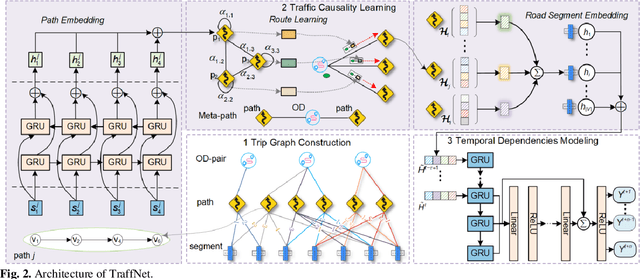
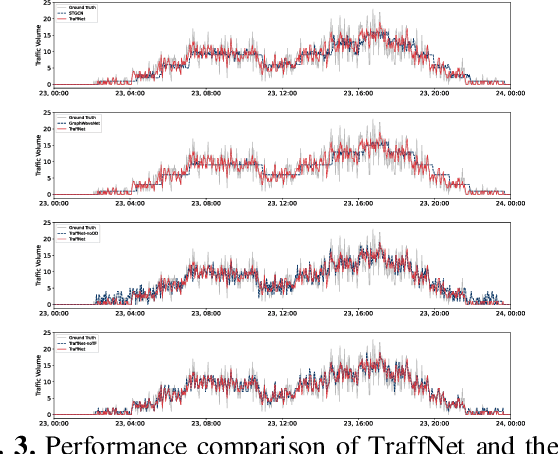
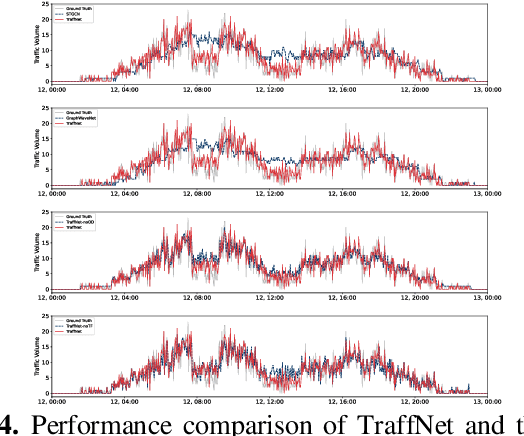
Road network digital twins (RNDTs) play a critical role in the development of next-generation intelligent transportation systems, enabling more precise traffic planning and control. To support just-in-time (JIT) decision making, RNDTs require a model that dynamically learns the traffic patterns from online sensor data and generates high-fidelity simulation results. Although current traffic prediction techniques based on graph neural networks have achieved state-of-the-art performance, these techniques only predict future traffic by mining correlations in historical traffic data, disregarding the causes of traffic generation, such as Origin-Destination (OD) demands and route selection. Therefore, their performance is unreliable for JIT decision making. To fill this gap, we introduce a novel deep learning framework called TraffNet that learns the causality of traffic volumes from vehicle trajectory data. First, we use a heterogeneous graph to represent the road network, allowing the model to incorporate causal features of traffic volumes. Next, inspired by the traffic domain knowledge, we propose a traffic causality learning method to learn an embedding vector that encodes OD demands and path-level dependencies for each road segment. Then, we model temporal dependencies to match the underlying process of traffic generation. Finally, the experiments verify the utility of TraffNet. The code of TraffNet is available at https://github.com/mayunyi-1999/TraffNet_code.git.
Serial-parallel Multi-Scale Feature Fusion for Anatomy-Oriented Hand Joint Detection
Feb 19, 2021
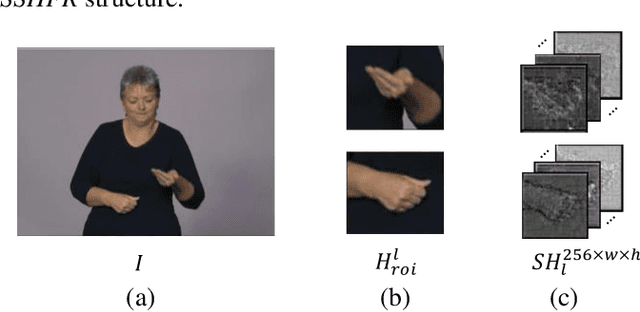
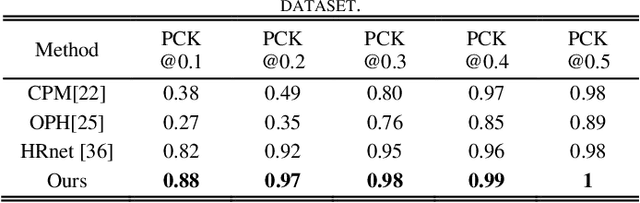

Accurate hand joints detection from images is a fundamental topic which is essential for many applications in computer vision and human computer interaction. This paper presents a two stage network for hand joints detection from single unmarked image by using serial-parallel multi-scale feature fusion. In stage I, the hand regions are located by a pre-trained network, and the features of each detected hand region are extracted by a shallow spatial hand features representation module. The extracted hand features are then fed into stage II, which consists of serially connected feature extraction modules with similar structures, called "multi-scale feature fusion" (MSFF). A MSFF contains parallel multi-scale feature extraction branches, which generate initial hand joint heatmaps. The initial heatmaps are then mutually reinforced by the anatomic relationship between hand joints. The experimental results on five hand joints datasets show that the proposed network overperforms the state-of-the-art methods.
A Dynamic Model for Traffic Flow Prediction Using Improved DRN
Aug 14, 2018



Real-time traffic flow prediction can not only provide travelers with reliable traffic information so that it can save people's time, but also assist the traffic management agency to manage traffic system. It can greatly improve the efficiency of the transportation system. Traditional traffic flow prediction approaches usually need a large amount of data but still give poor performances. With the development of deep learning, researchers begin to pay attention to artificial neural networks (ANNs) such as RNN and LSTM. However, these ANNs are very time-consuming. In our research, we improve the Deep Residual Network and build a dynamic model which previous researchers hardly use. We firstly integrate the input and output of the $i^{th}$ layer to the input of the $i+1^{th}$ layer and prove that each layer will fit a simpler function so that the error rate will be much smaller. Then, we use the concept of online learning in our model to update pre-trained model during prediction. Our result shows that our model has higher accuracy than some state-of-the-art models. In addition, our dynamic model can perform better in practical applications.