 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired Curvature
Apr 25, 2025Soft robots, distinguished by their inherent compliance and continuum structures, present unique modeling challenges, especially when subjected to significant external loads such as gravity and payloads. In this study, we introduce an innovative data-driven modeling framework leveraging an Euler spiral-inspired shape representations to accurately describe the complex shapes of soft continuum actuators. Based on this representation, we develop neural network-based forward and inverse models to effectively capture the nonlinear behavior of a fiber-reinforced pneumatic bending actuator. Our forward model accurately predicts the actuator's deformation given inputs of pressure and payload, while the inverse model reliably estimates payloads from observed actuator shapes and known pressure inputs. Comprehensive experimental validation demonstrates the effectiveness and accuracy of our proposed approach. Notably, the augmented Euler spiral-based forward model achieves low average positional prediction errors of 3.38%, 2.19%, and 1.93% of the actuator length at the one-third, two-thirds, and tip positions, respectively. Furthermore, the inverse model demonstrates precision of estimating payloads with an average error as low as 0.72% across the tested range. These results underscore the potential of our method to significantly enhance the accuracy and predictive capabilities of modeling frameworks for soft robotic systems.
Fast Online Adaptive Neural MPC via Meta-Learning
Apr 24, 2025Data-driven model predictive control (MPC) has demonstrated significant potential for improving robot control performance in the presence of model uncertainties. However, existing approaches often require extensive offline data collection and computationally intensive training, limiting their ability to adapt online. To address these challenges, this paper presents a fast online adaptive MPC framework that leverages neural networks integrated with Model-Agnostic Meta-Learning (MAML). Our approach focuses on few-shot adaptation of residual dynamics - capturing the discrepancy between nominal and true system behavior - using minimal online data and gradient steps. By embedding these meta-learned residual models into a computationally efficient L4CasADi-based MPC pipeline, the proposed method enables rapid model correction, enhances predictive accuracy, and improves real-time control performance. We validate the framework through simulation studies on a Van der Pol oscillator, a Cart-Pole system, and a 2D quadrotor. Results show significant gains in adaptation speed and prediction accuracy over both nominal MPC and nominal MPC augmented with a freshly initialized neural network, underscoring the effectiveness of our approach for real-time adaptive robot control.
Back-stepping Experience Replay with Application to Model-free Reinforcement Learning for a Soft Snake Robot
Jan 21, 2024In this paper, we propose a novel technique, Back-stepping Experience Replay (BER), that is compatible with arbitrary off-policy reinforcement learning (RL) algorithms. BER aims to enhance learning efficiency in systems with approximate reversibility, reducing the need for complex reward shaping. The method constructs reversed trajectories using back-stepping transitions to reach random or fixed targets. Interpretable as a bi-directional approach, BER addresses inaccuracies in back-stepping transitions through a distillation of the replay experience during learning. Given the intricate nature of soft robots and their complex interactions with environments, we present an application of BER in a model-free RL approach for the locomotion and navigation of a soft snake robot, which is capable of serpentine motion enabled by anisotropic friction between the body and ground. In addition, a dynamic simulator is developed to assess the effectiveness and efficiency of the BER algorithm, in which the robot demonstrates successful learning (reaching a 100% success rate) and adeptly reaches random targets, achieving an average speed 48% faster than that of the best baseline approach.
Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Jan 12, 2024We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$\%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
Label-Efficient Learning in Agriculture: A Comprehensive Review
May 24, 2023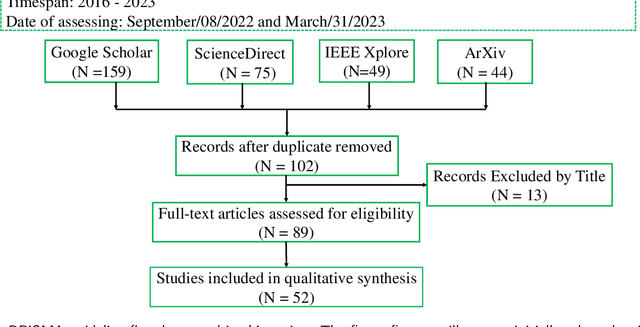
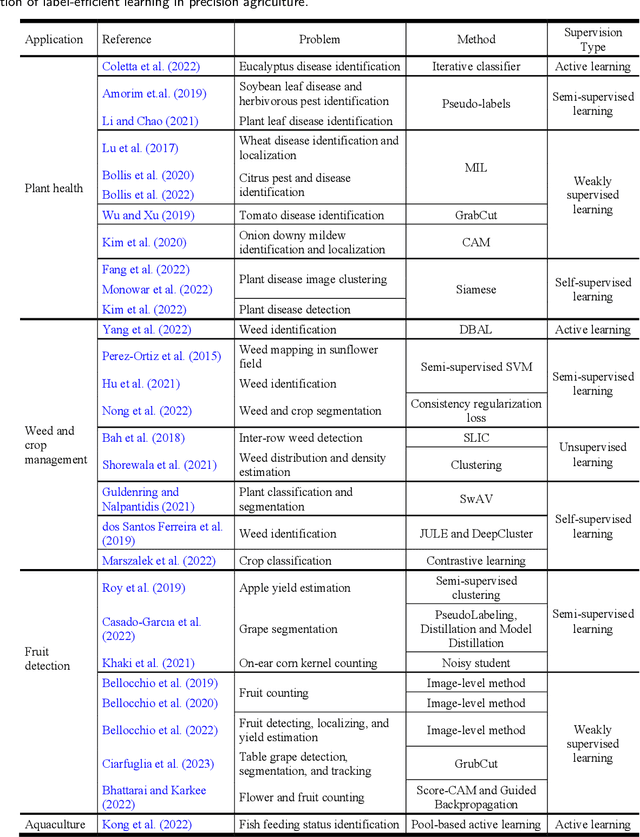
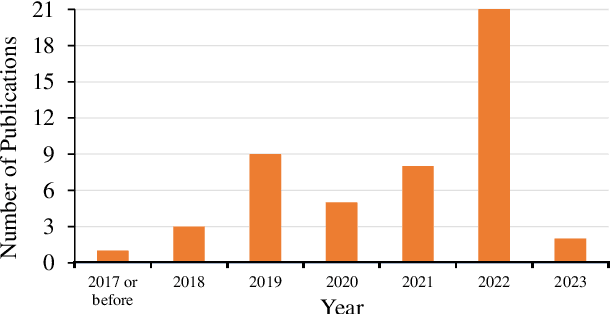
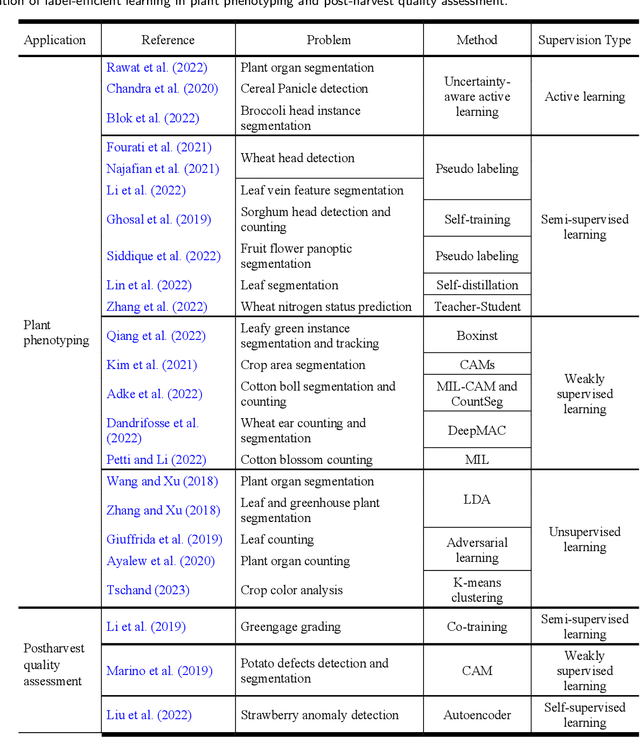
The past decade has witnessed many great successes of machine learning (ML) and deep learning (DL) applications in agricultural systems, including weed control, plant disease diagnosis, agricultural robotics, and precision livestock management. Despite tremendous progresses, one downside of such ML/DL models is that they generally rely on large-scale labeled datasets for training, and the performance of such models is strongly influenced by the size and quality of available labeled data samples. In addition, collecting, processing, and labeling such large-scale datasets is extremely costly and time-consuming, partially due to the rising cost in human labor. Therefore, developing label-efficient ML/DL methods for agricultural applications has received significant interests among researchers and practitioners. In fact, there are more than 50 papers on developing and applying deep-learning-based label-efficient techniques to address various agricultural problems since 2016, which motivates the authors to provide a timely and comprehensive review of recent label-efficient ML/DL methods in agricultural applications. To this end, we first develop a principled taxonomy to organize these methods according to the degree of supervision, including weak supervision (i.e., active learning and semi-/weakly- supervised learning), and no supervision (i.e., un-/self- supervised learning), supplemented by representative state-of-the-art label-efficient ML/DL methods. In addition, a systematic review of various agricultural applications exploiting these label-efficient algorithms, such as precision agriculture, plant phenotyping, and postharvest quality assessment, is presented. Finally, we discuss the current problems and challenges, as well as future research directions. A well-classified paper list can be accessed at https://github.com/DongChen06/Label-efficient-in-Agriculture.
Towards Modeling Human Motor Learning Dynamics in High-Dimensional Spaces
Feb 06, 2022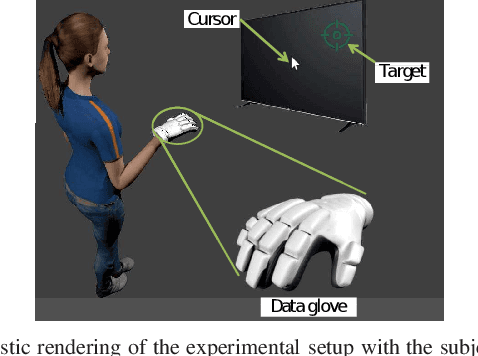
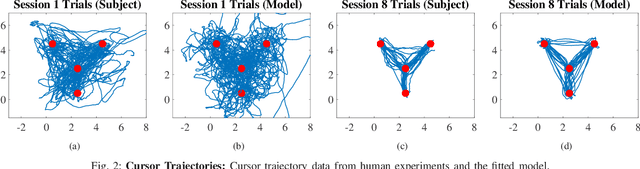

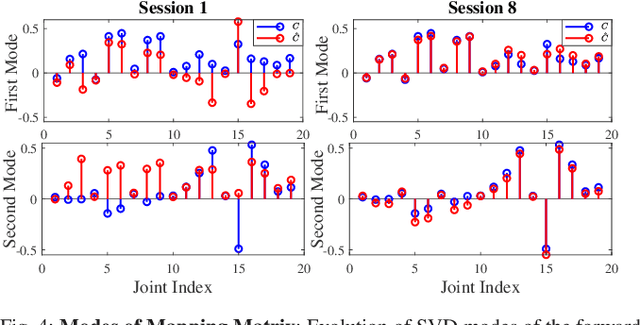
Designing effective rehabilitation strategies for upper extremities, particularly hands and fingers, warrants the need for a computational model of human motor learning. The presence of large degrees of freedom (DoFs) available in these systems makes it difficult to balance the trade-off between learning the full dexterity and accomplishing manipulation goals. The motor learning literature argues that humans use motor synergies to reduce the dimension of control space. Using the low-dimensional space spanned by these synergies, we develop a computational model based on the internal model theory of motor control. We analyze the proposed model in terms of its convergence properties and fit it to the data collected from human experiments. We compare the performance of the fitted model to the experimental data and show that it captures human motor learning behavior well.
Derivative-Based Koopman Operators for Real-Time Control of Robotic Systems
Oct 12, 2020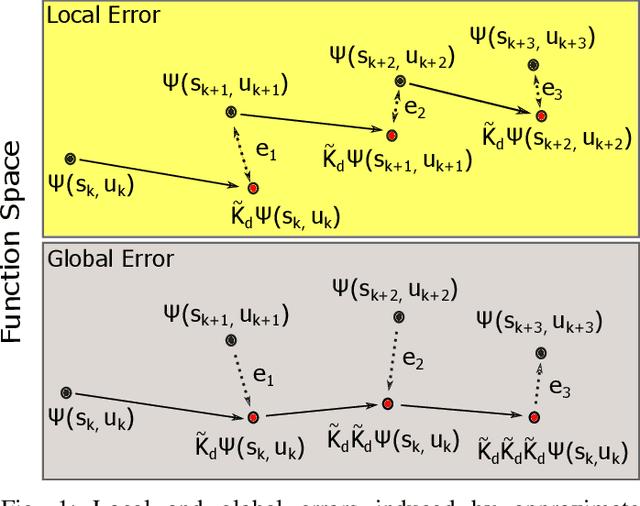
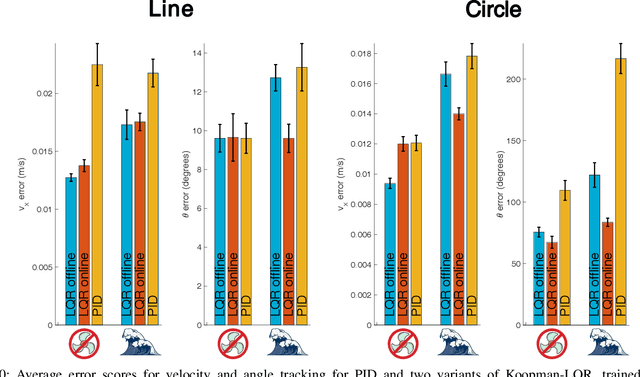

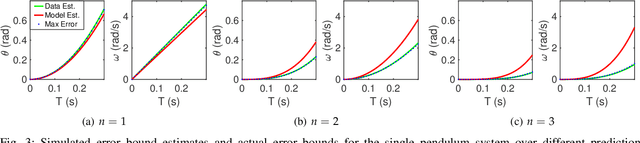
This paper presents a methodology for linear embedding of nonlinear systems that bounds the model error in terms of the prediction horizon and the magnitude of the derivatives of the system states. Using higher-order derivatives of general nonlinear dynamics that need not be known, we construct a Koopman operator-based linear representation and utilize Taylor series accuracy to derive an error bound. The error formula is used to choose the order of derivatives in the basis functions and obtain a data-driven Koopman model using a closed-form expression that can be computed in real time. The Koopman representation of the nonlinear system is then used to synthesize LQR feedback. The efficacy of the embedding approach is demonstrated with simulation and experimental results on the control of a tail-actuated robotic fish. Experimental results show that the proposed data-driven control approach outperforms a tuned PID (Proportional Integral Derivative) controller and that updating the data-driven model online significantly improves performance in the presence of unmodeled fluid disturbance. This paper is complemented with a video: https://youtu.be/9_wx0tdDta0.
Expedited Multi-Target Search with Guaranteed Performance via Multi-fidelity Gaussian Processes
May 18, 2020

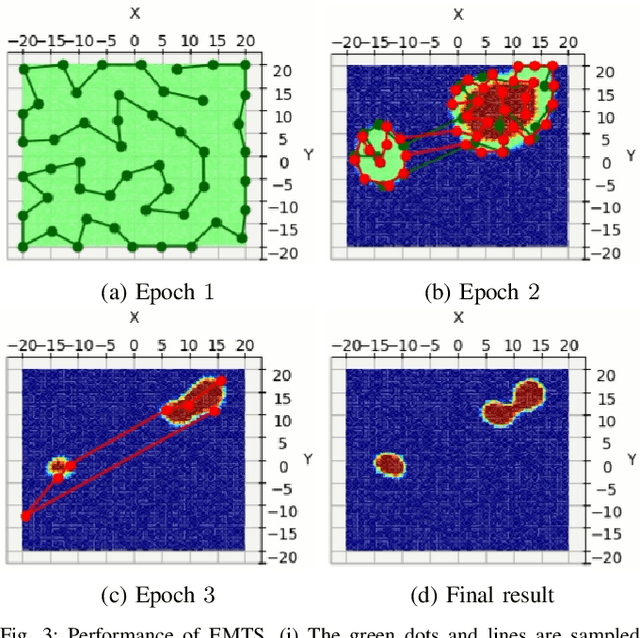
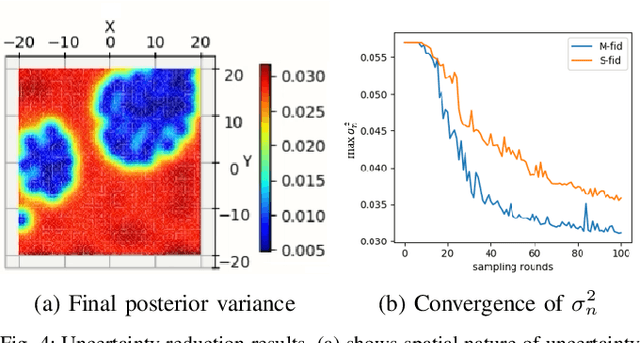
We consider a scenario in which an autonomous vehicle equipped with a downward facing camera operates in a 3D environment and is tasked with searching for an unknown number of stationary targets on the 2D floor of the environment. The key challenge is to minimize the search time while ensuring a high detection accuracy. We model the sensing field using a multi-fidelity Gaussian process that systematically describes the sensing information available at different altitudes from the floor. Based on the sensing model, we design a novel algorithm called Expedited Multi-Target Search (EMTS) that (i) addresses the coverage-accuracy trade-off: sampling at locations farther from the floor provides wider field of view but less accurate measurements, (ii) computes an occupancy map of the floor within a prescribed accuracy and quickly eliminates unoccupied regions from the search space, and (iii) travels efficiently to collect the required samples for target detection. We rigorously analyze the algorithm and establish formal guarantees on the target detection accuracy and the expected detection time. We illustrate the algorithm using a simulated multi-target search scenario.